You might also like
- That Man BackstoryDocument6 pagesThat Man BackstoryMimebladeNo ratings yet
- Thruster EffectivityDocument190 pagesThruster Effectivityronny-su100% (2)
- Bollard PullDocument10 pagesBollard PullKarem Lastarria Monardes100% (1)
- 2007 WOFluidsGuideDocument27 pages2007 WOFluidsGuideashadNo ratings yet
- 29thSNH PDFDocument10 pages29thSNH PDFAnant AjithkumarNo ratings yet
- 29thSNH PDFDocument10 pages29thSNH PDFAnant AjithkumarNo ratings yet
- Deep-water Mooring Study Analyzes Effects of Water Depth VariationDocument14 pagesDeep-water Mooring Study Analyzes Effects of Water Depth VariationkometmayorNo ratings yet
- Estimation of The Hydrodynamics CoefficientsDocument6 pagesEstimation of The Hydrodynamics CoefficientsManh Dien HuynhNo ratings yet
- Fell Chapter 1Document12 pagesFell Chapter 1KrozeNo ratings yet
- Automatic Parametric Hull Form Optimization of FasDocument9 pagesAutomatic Parametric Hull Form Optimization of FasSai Sudhakar MNNo ratings yet
- CFD 1 8Document8 pagesCFD 1 8Bebek DaratNo ratings yet
- Manoeuvring Prediction Based On CFD Generated Derivatives: April 2016Document10 pagesManoeuvring Prediction Based On CFD Generated Derivatives: April 2016Faheem AhmedNo ratings yet
- Numerical and Experimental Study On Seakeeping PerDocument13 pagesNumerical and Experimental Study On Seakeeping PerRFNo ratings yet
- Prediction of Warship Manoeuvring Coefficients Using CFD: C. Oldfield, M. Moradi Larmaei, A. KendrickDocument17 pagesPrediction of Warship Manoeuvring Coefficients Using CFD: C. Oldfield, M. Moradi Larmaei, A. KendrickJason StanleyNo ratings yet
- Study of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachDocument10 pagesStudy of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachCarlosNo ratings yet
- Numerical Evaluation of Hydrodynamic Characteristics of Planing HullsDocument12 pagesNumerical Evaluation of Hydrodynamic Characteristics of Planing HullsLiazid KerhaNo ratings yet
- An Integrated Hydrodynamics and Control Model of A Tethered Underwater RobotDocument13 pagesAn Integrated Hydrodynamics and Control Model of A Tethered Underwater Robothuy.tranvugia1305No ratings yet
- Development of An ROV Operated Both As Towed and Self-Propulsive VehicleDocument43 pagesDevelopment of An ROV Operated Both As Towed and Self-Propulsive VehicleAntonio Carlos Bana ChiellaNo ratings yet
- Virtual Maneuvering Test in CFD Media in Presence of Free SurfaceDocument19 pagesVirtual Maneuvering Test in CFD Media in Presence of Free SurfaceAhmad HajivandNo ratings yet
- CFD Potential Flow and System-Based SimuDocument54 pagesCFD Potential Flow and System-Based SimuSarath Babu SNo ratings yet
- Fundamental Properties of Linear Ship Steering Dynamic ModelsDocument11 pagesFundamental Properties of Linear Ship Steering Dynamic ModelsEdsonNo ratings yet
- Scale Effects On Hydrodynamic Manoeuvring Force PredictionDocument6 pagesScale Effects On Hydrodynamic Manoeuvring Force PredictionMaciej ReichelNo ratings yet
- Ifac Pu Blications: Arquitectura y Automatica Complutens (2) Automatica, Ciencias. UNED. 28040 (3) Experiencias SpainDocument6 pagesIfac Pu Blications: Arquitectura y Automatica Complutens (2) Automatica, Ciencias. UNED. 28040 (3) Experiencias SpainsirousNo ratings yet
- Yaakob 2012Document9 pagesYaakob 2012Bill Erick CastilloNo ratings yet
- CFD Analysis of Propeller Performance in Oblique Flow: Giulio Dubbioso, Roberto Muscari, Andrea Di MascioDocument8 pagesCFD Analysis of Propeller Performance in Oblique Flow: Giulio Dubbioso, Roberto Muscari, Andrea Di MascioNoumanNo ratings yet
- 1 s2.0 S0894177715001533 MainDocument16 pages1 s2.0 S0894177715001533 MainRashmiNo ratings yet
- Theoretical Background and Application of MANSIM For Ship Maneuvering SimulationsDocument20 pagesTheoretical Background and Application of MANSIM For Ship Maneuvering SimulationsnevbiralyaNo ratings yet
- Servo Valve Endurance Test For Water Hydraulic Systems in ITERDocument4 pagesServo Valve Endurance Test For Water Hydraulic Systems in ITERgustavo freitasNo ratings yet
- Identification of 4 DoF Maneuvering Mathemat 2022 International Journal of NDocument16 pagesIdentification of 4 DoF Maneuvering Mathemat 2022 International Journal of NNguyen Phuc LinhNo ratings yet
- 27th Ittc Oec Final Report v7Document69 pages27th Ittc Oec Final Report v7Myo Zin AungNo ratings yet
- Evaluation of submarine resistance methodsDocument9 pagesEvaluation of submarine resistance methodsAbdul HadiNo ratings yet
- Cavitation CFDDocument9 pagesCavitation CFDTinyPavelNo ratings yet
- Comparison of Coupled Aero-Hydro-Servo-Elastic Simulations For Floating Wind Turbines With Model TestsDocument10 pagesComparison of Coupled Aero-Hydro-Servo-Elastic Simulations For Floating Wind Turbines With Model TestsIqbal MeskinzadaNo ratings yet
- Hiper04 Paper ADocument13 pagesHiper04 Paper AaspoisdNo ratings yet
- Time-Domain Seakeeping Simulations For A High Speed Catamaran With An Active Ride Control SystemDocument9 pagesTime-Domain Seakeeping Simulations For A High Speed Catamaran With An Active Ride Control SystemsirousNo ratings yet
- Comparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionDocument8 pagesComparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionKariem ZakiNo ratings yet
- 2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationsDocument10 pages2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationshenkNo ratings yet
- Omae2011 49354 FinalDocument11 pagesOmae2011 49354 FinalribbyNo ratings yet
- HSMV 2014 Vitiello MirandaDocument9 pagesHSMV 2014 Vitiello MirandaTihomir MarkovicNo ratings yet
- Resistance experiments on high-speed displacement monohull and catamaran forms in shallow waterDocument48 pagesResistance experiments on high-speed displacement monohull and catamaran forms in shallow waterTullio OpattiNo ratings yet
- Felli - Experimental Ana.2006.SYMPDocument8 pagesFelli - Experimental Ana.2006.SYMPIgnacio SantanaNo ratings yet
- Propulsion and Steering Behaviour of A Ship Equipped With Two Contra-Rotating Z-DrivesDocument8 pagesPropulsion and Steering Behaviour of A Ship Equipped With Two Contra-Rotating Z-DrivesNikolas GonzalezNo ratings yet
- 1 s2.0 S1001605811603119 MainDocument8 pages1 s2.0 S1001605811603119 MainMason SaidNo ratings yet
- Ship Maneuvering Under Human ControlDocument106 pagesShip Maneuvering Under Human ControlAnil Kumar DashNo ratings yet
- Resis Sinkage Trim Wake Test PDFDocument30 pagesResis Sinkage Trim Wake Test PDFSea Man MktNo ratings yet
- Semester IvDocument7 pagesSemester IvShwet KumarNo ratings yet
- Badoe Simman2014Document8 pagesBadoe Simman2014Prasad PatilNo ratings yet
- CFDLV14 N5 P98 105Document8 pagesCFDLV14 N5 P98 105mabm89No ratings yet
- FAST99 PaperDocument12 pagesFAST99 PapertdfsksNo ratings yet
- EX1989Document66 pagesEX1989Kevin TangNo ratings yet
- Analysis of Propulsion Performance of KVLCC2 in Waves: July 2015Document11 pagesAnalysis of Propulsion Performance of KVLCC2 in Waves: July 2015Abhishek AroraNo ratings yet
- Paper Tugnology 2019 D1P2 International Standard For Bollard Pull TrialsDocument8 pagesPaper Tugnology 2019 D1P2 International Standard For Bollard Pull TrialsEduardo UrquizaNo ratings yet
- Hydrodynamic Forces On Pipelines: Model Tests: M. B. Bryndum V. JacobsenDocument11 pagesHydrodynamic Forces On Pipelines: Model Tests: M. B. Bryndum V. JacobsenKumarJR86No ratings yet
- Study of Numerical Simulation Applying To The Design of An Orifice With High-Velocity WaterjetDocument10 pagesStudy of Numerical Simulation Applying To The Design of An Orifice With High-Velocity WaterjetYu HuiNo ratings yet
- Experimental Study of Open Water Non-Series Marine Propeller PerformanceDocument7 pagesExperimental Study of Open Water Non-Series Marine Propeller PerformanceSachin KumarNo ratings yet
- CFD Assessment of Ropax Hull Resistance With Various Initial Drafts and Trim AnglesDocument8 pagesCFD Assessment of Ropax Hull Resistance With Various Initial Drafts and Trim AnglesRahul SunilNo ratings yet
- Study On Dynamic Response of Underwater Towed System in Ship Propeller Wakes Using A New Hydrodynamic ModelDocument20 pagesStudy On Dynamic Response of Underwater Towed System in Ship Propeller Wakes Using A New Hydrodynamic ModelAhmad luthfi asrorNo ratings yet
- Seakeeping TestingDocument6 pagesSeakeeping TestinggksahaNo ratings yet
- Comparative Study of Seakeeping Analysis Results From Various MethodsDocument8 pagesComparative Study of Seakeeping Analysis Results From Various MethodsTri HariyNo ratings yet
- Jmse 08 00649Document23 pagesJmse 08 00649Ruchit PathakNo ratings yet
- 1989-116-199-213-K Thomas-Elbow, Creep, CycDocument15 pages1989-116-199-213-K Thomas-Elbow, Creep, CycSRIKANTH K 15PHD1093No ratings yet
- JMST2015Document12 pagesJMST2015Max CedNo ratings yet
- CM-18-1006-219 Sopep-2-171Document183 pagesCM-18-1006-219 Sopep-2-171Anant AjithkumarNo ratings yet
- AC Distribution Systems ModuleDocument42 pagesAC Distribution Systems ModuleAnant AjithkumarNo ratings yet
- Ship Electrical Systems OverviewDocument36 pagesShip Electrical Systems OverviewAnant AjithkumarNo ratings yet
- Ship Electrical Systems OverviewDocument36 pagesShip Electrical Systems OverviewAnant AjithkumarNo ratings yet
- Automatic Voltage RegulatorDocument30 pagesAutomatic Voltage RegulatorAnant AjithkumarNo ratings yet
- CM-18-1006-219 Sopep-2-171Document183 pagesCM-18-1006-219 Sopep-2-171Anant AjithkumarNo ratings yet
- Power Source, ElectrodesDocument16 pagesPower Source, ElectrodesAnant AjithkumarNo ratings yet
- Welding in Production ShopDocument31 pagesWelding in Production ShopAnant AjithkumarNo ratings yet
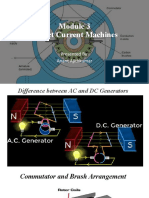
- Direct Current Machines: Presented by Anant AjithkumarDocument26 pagesDirect Current Machines: Presented by Anant AjithkumarAnant AjithkumarNo ratings yet
- AWSDocument1 pageAWSAnant AjithkumarNo ratings yet
- Factors Affecting Weldability and How to Improve ItDocument15 pagesFactors Affecting Weldability and How to Improve ItAnant Ajithkumar100% (2)
- Weldability: Processes Work BetterDocument1 pageWeldability: Processes Work BetterAnant AjithkumarNo ratings yet
- Introduction To Welding MetallurgyDocument11 pagesIntroduction To Welding MetallurgyAnant AjithkumarNo ratings yet
- Gas Metal Arc Welding (MIG) Process GuideDocument14 pagesGas Metal Arc Welding (MIG) Process GuideAnant AjithkumarNo ratings yet
- Factors Affecting Weldability and How to Improve ItDocument15 pagesFactors Affecting Weldability and How to Improve ItAnant Ajithkumar100% (2)
- Rudder CalculationDocument8 pagesRudder CalculationAnant AjithkumarNo ratings yet
- Investigation On Resistance Effects Through Towing Test and CFD Analysis On Catamaran Boat Hull FormDocument11 pagesInvestigation On Resistance Effects Through Towing Test and CFD Analysis On Catamaran Boat Hull FormAnant AjithkumarNo ratings yet
- Factors Affecting Weldability and How to Improve ItDocument15 pagesFactors Affecting Weldability and How to Improve ItAnant Ajithkumar100% (2)
- Bollard Pull CalculationDocument5 pagesBollard Pull CalculationAnant AjithkumarNo ratings yet
- Basics of Corrosion ControlDocument9 pagesBasics of Corrosion ControlSenad Senna MuratovicNo ratings yet
- Numerical simulation of interference effects for high-speed catamaransDocument17 pagesNumerical simulation of interference effects for high-speed catamaransAnant AjithkumarNo ratings yet
- Damage Stability Analysis in Particular Flooding S PDFDocument11 pagesDamage Stability Analysis in Particular Flooding S PDFAnant AjithkumarNo ratings yet
- Anant Ajithkumar Trainee Engineer ResumeDocument1 pageAnant Ajithkumar Trainee Engineer ResumeAnant AjithkumarNo ratings yet
- An Investigation Into The Resistance Components of Converting A Traditional Monohull Fishing Vessel Into Catamaran FormDocument11 pagesAn Investigation Into The Resistance Components of Converting A Traditional Monohull Fishing Vessel Into Catamaran FormAnant AjithkumarNo ratings yet
- Numerical simulation of interference effects for high-speed catamaransDocument17 pagesNumerical simulation of interference effects for high-speed catamaransAnant AjithkumarNo ratings yet
- The Resistance of The Delft 372 Hull: AbstractDocument4 pagesThe Resistance of The Delft 372 Hull: AbstractAnant AjithkumarNo ratings yet
- CFD Analysis On Ejector Cooling System With Variable Throat GeometryDocument6 pagesCFD Analysis On Ejector Cooling System With Variable Throat GeometryijripublishersNo ratings yet
- Speed of Sound - Physics LibreTextsDocument6 pagesSpeed of Sound - Physics LibreTextsHemant KuralkarNo ratings yet
- Homework 3Document2 pagesHomework 3Shaoor Ahmad0% (1)
- Computational Multiphase Flow ThesisDocument299 pagesComputational Multiphase Flow ThesisDeepak K NambiarNo ratings yet
- Lesson PlansquareDocument2 pagesLesson PlansquareJonathan Robinson100% (1)
- Reaction Kinetics and Scale-Up of Catalytic ProcessesDocument6 pagesReaction Kinetics and Scale-Up of Catalytic ProcessessatishchemengNo ratings yet
- Aviation Weather: Air Temperature and Pressure Affecting AircraftDocument76 pagesAviation Weather: Air Temperature and Pressure Affecting AircraftAbdulhamid AldosaryNo ratings yet
- Cheat Sheet Chemistry Salt Analysis 12th CBSEDocument5 pagesCheat Sheet Chemistry Salt Analysis 12th CBSETammanurRaviNo ratings yet
- Assignments Assignment 6Document2 pagesAssignments Assignment 6jjbb8No ratings yet
- MIKE 213 MT FM ScientificDocDocument46 pagesMIKE 213 MT FM ScientificDocHung PhanNo ratings yet
- Direct VariationDocument25 pagesDirect VariationRey HisonaNo ratings yet
- Rheology and Rebound Behaviour of Dry-Mix Shotcrete: Markus Pfeuffer, Wolfgang KusterleDocument7 pagesRheology and Rebound Behaviour of Dry-Mix Shotcrete: Markus Pfeuffer, Wolfgang KusterleKiko NobreNo ratings yet
- BDC Torque Vs Advance AngleDocument12 pagesBDC Torque Vs Advance AngleAhmet Yasin BaltacıNo ratings yet
- Lec2 - Elementary and Higher Surveying - 2013-2014Document1 pageLec2 - Elementary and Higher Surveying - 2013-2014Jesus Ray M. MansayonNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFBOSS BOSSNo ratings yet
- Solutions: Quiz 6: Control of Mobile RobotsDocument3 pagesSolutions: Quiz 6: Control of Mobile RobotsMokhtar AlerteNo ratings yet
- Gas Measurement Requirements and Procedures ID 6849 ID 10250 ID 10703Document53 pagesGas Measurement Requirements and Procedures ID 6849 ID 10250 ID 10703triminhdang_phar6701No ratings yet
- Eurocode 2 Variable Strut Inclination Method For Shear, Its Modelling Uncertainty, and Reliability CalibrationDocument17 pagesEurocode 2 Variable Strut Inclination Method For Shear, Its Modelling Uncertainty, and Reliability CalibrationKenneth Mensah100% (1)
- Simpson - Safety Considerations For The HYD Limit State - 272cDocument18 pagesSimpson - Safety Considerations For The HYD Limit State - 272cBinSayeedNo ratings yet
- Lab #5 Parallelogram LawDocument9 pagesLab #5 Parallelogram LawDaniel KellyNo ratings yet
- 2006 Adsorption Equilibrium of Phenol Onto Chemically Modified Activated Carbon F400Document6 pages2006 Adsorption Equilibrium of Phenol Onto Chemically Modified Activated Carbon F400Alberto Delgado QuiñonesNo ratings yet
- Measurements: Units of MeasurementDocument29 pagesMeasurements: Units of MeasurementannisaNo ratings yet
- Flow Profile For Reciprocating Pumps - Chemical Engineering ProcessingDocument3 pagesFlow Profile For Reciprocating Pumps - Chemical Engineering ProcessingVILLANUEVA_DANIEL2064No ratings yet
- The University of Nottingham: Faculty of Engineering Department of Electrical and Electronic EngineeringDocument39 pagesThe University of Nottingham: Faculty of Engineering Department of Electrical and Electronic EngineeringsamiNo ratings yet
- My Technical ReportDocument36 pagesMy Technical ReportSHAMSUDEEN100% (2)
- A True Three-Dimensional Wellbore Positioning Method Based On The Earth EllipsoidDocument7 pagesA True Three-Dimensional Wellbore Positioning Method Based On The Earth EllipsoidhkaqlqNo ratings yet
- Rotor Bow-1 PDFDocument12 pagesRotor Bow-1 PDFRanjit ShawNo ratings yet
- Electromagnetic Interference and CompatibilityDocument3 pagesElectromagnetic Interference and CompatibilityThiyagarajan K0% (1)