You might also like
- EHSx - PDSX - BGS5 - Updating Firmware AN16 V02 (17.12.2014) PDFDocument23 pagesEHSx - PDSX - BGS5 - Updating Firmware AN16 V02 (17.12.2014) PDFEug. Sam.100% (1)
- Multi-Objective Optimization Path Planning With Moving TargetDocument13 pagesMulti-Objective Optimization Path Planning With Moving TargetIAES IJAINo ratings yet
- Hybrid Methods of Autonomous Path PlanningDocument28 pagesHybrid Methods of Autonomous Path PlanningGiorgi RcheulishviliNo ratings yet
- AStar 1Document11 pagesAStar 1truhtNo ratings yet
- Alfabi Muhlisin Sakti: Path Planning Using Arrival Time Field For Nonholonomic Mobile RobotDocument4 pagesAlfabi Muhlisin Sakti: Path Planning Using Arrival Time Field For Nonholonomic Mobile RobotAlfabi Muhlisin SaktiNo ratings yet
- Mobile Robot Navigation Using A Behavioural StrategyDocument16 pagesMobile Robot Navigation Using A Behavioural StrategyM Taufik FirmansyahNo ratings yet
- Computers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentDocument15 pagesComputers: State Estimation and Localization Based On Sensor Fusion For Autonomous Robots in Indoor EnvironmentsowNo ratings yet
- Modelling of Mobile Robot DynamicsDocument9 pagesModelling of Mobile Robot Dynamicskostya_4524No ratings yet
- Modelling of Mobile Robot Dynamics: JANUARY 2010Document10 pagesModelling of Mobile Robot Dynamics: JANUARY 2010NguyễnĐạtNo ratings yet
- An Experimental Study On Vision Based Controlling of A Spherical Rolling RobotDocument5 pagesAn Experimental Study On Vision Based Controlling of A Spherical Rolling RobotChristian MarpaungNo ratings yet
- Multi-Level Control For Multiple Mobile Robot SystDocument30 pagesMulti-Level Control For Multiple Mobile Robot Systducdo dangNo ratings yet
- Obstacles Avoidance For An Articulated Robot Using Modified Smooth Path PlanningDocument6 pagesObstacles Avoidance For An Articulated Robot Using Modified Smooth Path PlanningKaranNo ratings yet
- Energies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterDocument31 pagesEnergies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterMario CalderonNo ratings yet
- Collision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle MethodDocument15 pagesCollision Avoidance of High-Speed Obstacles For Mobile Robots Via Maximum-Speed Aware Velocity Obstacle Methodabinaya_359109181No ratings yet
- An Overview of Autonomous Mobile Robot Path Planning AlgorithmsDocument7 pagesAn Overview of Autonomous Mobile Robot Path Planning AlgorithmsWilberFabiánNo ratings yet
- FICTA - Paper - Final PDFDocument9 pagesFICTA - Paper - Final PDFPratap Kumar PanigrahiNo ratings yet
- Imtc RobotNavigation 7594Document5 pagesImtc RobotNavigation 7594flv_91No ratings yet
- PathDocument6 pagesPathKhushin LakharaNo ratings yet
- Robot Global Path Planning Overview and A Variation of Ant Colony System AlgorithmDocument8 pagesRobot Global Path Planning Overview and A Variation of Ant Colony System AlgorithmBenchmoham AmenNo ratings yet
- Waypoint Navigation SystemDocument7 pagesWaypoint Navigation SystemShaukat WazirNo ratings yet
- Behavior Dynamics Based Motion Planning of Mobile Robots in Uncertain Dynamic EnvironmentsDocument25 pagesBehavior Dynamics Based Motion Planning of Mobile Robots in Uncertain Dynamic EnvironmentsAbd SalahNo ratings yet
- Voronoi Diagram, Dynamic Path PlanningDocument4 pagesVoronoi Diagram, Dynamic Path PlanningrakeluvNo ratings yet
- SensorsDocument20 pagesSensorsfaith_khp73301No ratings yet
- A Modular Control Architecture For Semi-Autonomous NavigationDocument4 pagesA Modular Control Architecture For Semi-Autonomous NavigationKai GustavNo ratings yet
- Ece - Ijeceierd - All New 3Document11 pagesEce - Ijeceierd - All New 3global-marketin8184No ratings yet
- Multi Robot Path Planning For WarehouseDocument13 pagesMulti Robot Path Planning For WarehouseAnkur BhargavaNo ratings yet
- 3Document6 pages3Samuel HamiltonNo ratings yet
- Trajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmDocument15 pagesTrajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmIAES International Journal of Robotics and AutomationNo ratings yet
- Fuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous VehicleDocument8 pagesFuzzy Logic of Speed and Steering Control System For Three Dimensional Line Following of An Autonomous Vehiclealeena_bcNo ratings yet
- Motion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiDocument6 pagesMotion of Robots in A Non Rectangular Workspace: K Prasanna LakshmiInternational Journal of Engineering Inventions (IJEI)No ratings yet
- The International Journal of Robotics Research-2007-Lapierre-361-75Document15 pagesThe International Journal of Robotics Research-2007-Lapierre-361-75Jesse MorrisNo ratings yet
- Mathematics 10 03990 v2Document28 pagesMathematics 10 03990 v2asNo ratings yet
- Robot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesDocument8 pagesRobot Motion Planning For Map Building: Benjam In Tovar, Rafael Murrieta-Cid and Claudia EstevesIulian AlexNo ratings yet
- A Survey of Path Planning Algorithms For Mobile RobotsDocument21 pagesA Survey of Path Planning Algorithms For Mobile RobotsSudhakar RamasamyNo ratings yet
- Tracking Control 3 Omni Wheel ModelDocument15 pagesTracking Control 3 Omni Wheel ModelRangga NaufalNo ratings yet
- 1 s2.0 S0921889016302512 MainDocument15 pages1 s2.0 S0921889016302512 Mainfaith_khp73301No ratings yet
- Bok - 978 981 15 9647 6Document13 pagesBok - 978 981 15 9647 6Shaik Himam SahebNo ratings yet
- Landing Route Planning Method For Micro Drones Based On HybridDocument5 pagesLanding Route Planning Method For Micro Drones Based On HybridGhalidh ChoirNo ratings yet
- Path Planning of Mobile Robot in Unknown EnvironmentDocument6 pagesPath Planning of Mobile Robot in Unknown EnvironmentlaishramNo ratings yet
- An Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Document4 pagesAn Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Vesag nNo ratings yet
- A Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityDocument30 pagesA Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityAbdessamed BelhadjNo ratings yet
- An Adaptive Motion Planning Algorithm For Obstacle Avoidance in Autonomous Vehicle ParkingDocument11 pagesAn Adaptive Motion Planning Algorithm For Obstacle Avoidance in Autonomous Vehicle ParkingIAES IJAINo ratings yet
- Jose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierDocument14 pagesJose Luis Guzman, and Roland Siegwart : Ramon Gonzalez, Francisco Rodriguez Cedric PradalierSaimoon QuaziNo ratings yet
- 190 460 1 PBDocument9 pages190 460 1 PBAndra LuisNo ratings yet
- Sensors 20 05409Document19 pagesSensors 20 05409mezianeNo ratings yet
- A Reconfiguration Method For Muti-Robot Monitoring Patrols: Cybernetics and SystemsDocument27 pagesA Reconfiguration Method For Muti-Robot Monitoring Patrols: Cybernetics and SystemsPablo Sari CedilloNo ratings yet
- Constraint-Based Optimization of Priority Schemes For Decoupled Path Planning TechniquesDocument15 pagesConstraint-Based Optimization of Priority Schemes For Decoupled Path Planning TechniquessigmateNo ratings yet
- Acomp 2017 21Document6 pagesAcomp 2017 21Alfabi Muhlisin SaktiNo ratings yet
- Modified Artificial Potential Fields Algorithm For Mobile Robot Path PlanningDocument4 pagesModified Artificial Potential Fields Algorithm For Mobile Robot Path PlanningiaetsdiaetsdNo ratings yet
- Final ManuscriptDocument20 pagesFinal ManuscriptDharnish Raja.JNo ratings yet
- Optimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian ParberryDocument10 pagesOptimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian Parberrysaeed khodayganNo ratings yet
- Human Expertise in Mobile Robot Navigation 2017 - Rat Quan TrongDocument12 pagesHuman Expertise in Mobile Robot Navigation 2017 - Rat Quan TrongPham ThuanNo ratings yet
- 1 s2.0 S0921889020305091 MainDocument8 pages1 s2.0 S0921889020305091 MainTri SuakaNo ratings yet
- A Waypoint Tracking Controller For Autonomous RoadDocument23 pagesA Waypoint Tracking Controller For Autonomous RoadBẢO Nguyễn Lê QuốcNo ratings yet
- Literature Review20Document52 pagesLiterature Review20roshan212001No ratings yet
- Chapter 5: ConclusionDocument6 pagesChapter 5: ConclusionMuhammad Danial DanialNo ratings yet
- Behav Plan RepDocument7 pagesBehav Plan RepSamir BachirNo ratings yet
- FYP Review PaperDocument6 pagesFYP Review PaperMatthew MontebelloNo ratings yet
- Entropy 19 00213Document15 pagesEntropy 19 00213bot56mailNo ratings yet
- Daniel Mellinger ThesisDocument137 pagesDaniel Mellinger ThesisFENIL DESAINo ratings yet
- Future of DronesDocument17 pagesFuture of DronesFENIL DESAINo ratings yet
- Robotics Graduate Handbook 2019-2020Document18 pagesRobotics Graduate Handbook 2019-2020FENIL DESAINo ratings yet
- Law School SopDocument4 pagesLaw School SopFENIL DESAINo ratings yet
- Statement of Purpose-MichiganDocument1 pageStatement of Purpose-MichiganFENIL DESAINo ratings yet
- SAP PM Tables-4Document8 pagesSAP PM Tables-4Srushti VHMNo ratings yet
- Bugreport ADT1061 QP1A.190711.020 2021 12 01 21 49 24 Dumpstate - Log 26902Document12 pagesBugreport ADT1061 QP1A.190711.020 2021 12 01 21 49 24 Dumpstate - Log 26902Özgür YakıcıNo ratings yet
- Guidlines For Online AssessmentDocument10 pagesGuidlines For Online Assessmentthanhtrang23No ratings yet
- Composite Platoon Trajectory Planning Strategy For Intersection Throughput MaximizationDocument15 pagesComposite Platoon Trajectory Planning Strategy For Intersection Throughput Maximization张晗钰No ratings yet
- ZLND 080400Document2 pagesZLND 080400Planeador MantenimientoNo ratings yet
- Josephus ProblemDocument29 pagesJosephus ProblemArdianto SuhendarNo ratings yet
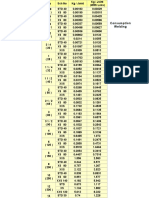
- Pipe Welding ConsumablesDocument1 pagePipe Welding ConsumablesOmar TocmoNo ratings yet
- Dpc-7600 8600 Daewoo DVD Portable PlayerDocument46 pagesDpc-7600 8600 Daewoo DVD Portable Playerapi-3702225No ratings yet
- Izmir University of Economics: ARCH 303Document35 pagesIzmir University of Economics: ARCH 303Sadia SamiNo ratings yet
- IBS HyderabadDocument2 pagesIBS Hyderabadsai sumanthNo ratings yet
- 2020 Sundancer 265 Europe Spec SheetDocument3 pages2020 Sundancer 265 Europe Spec SheetNickNo ratings yet
- SITXMGT001 Assessment Tasks and InstructionsDocument11 pagesSITXMGT001 Assessment Tasks and InstructionsKiko BaONo ratings yet
- Digitizing Power Grids: Resetting The Way We Power The WorldDocument7 pagesDigitizing Power Grids: Resetting The Way We Power The WorldHitachi America, Ltd.No ratings yet
- VFP9 Report OverviewDocument28 pagesVFP9 Report OverviewAndi HidajatNo ratings yet
- ReMoCloud Brochure - ENDocument6 pagesReMoCloud Brochure - ENPeterNo ratings yet
- OpenScape 4000 Assistant V8 Integrated Phone Software Management Administrator Documentation Issue 2Document27 pagesOpenScape 4000 Assistant V8 Integrated Phone Software Management Administrator Documentation Issue 2slimaneNo ratings yet
- DataDocument30 pagesDatagerryNo ratings yet
- Clevo P180HMDocument112 pagesClevo P180HMMatias MareNo ratings yet
- ChangesDocument4 pagesChangesMaria De Lourdes LopezNo ratings yet
- Renner Scroll LineDocument1 pageRenner Scroll LineAriantoNo ratings yet
- Contemporary World - Work It Out 'Listen To The World'Document2 pagesContemporary World - Work It Out 'Listen To The World'Aurioule DepaysoNo ratings yet
- Installation Manual PDFDocument20 pagesInstallation Manual PDFAprajita KayasthaNo ratings yet
- MEC1633Document12 pagesMEC1633potatoNo ratings yet
- Price of Samsung M13Document1 pagePrice of Samsung M13Kali CharanNo ratings yet
- Cosmos: SAP CRM Online TrainingDocument10 pagesCosmos: SAP CRM Online TrainingcosmosonlinetrainingNo ratings yet
- Problems in ForecastingDocument4 pagesProblems in ForecastingArjun VijayakumarNo ratings yet
- 04 Internet ConnectionsDocument6 pages04 Internet Connectionsabhay tyagiNo ratings yet
- Manual IMSDocument244 pagesManual IMSbruno freitasNo ratings yet
- Zeiss Humphrey Matrix 800 User ManualDocument158 pagesZeiss Humphrey Matrix 800 User ManualMbrck NewNo ratings yet