You might also like
- 1 5134167750603702289 PDFDocument14 pages1 5134167750603702289 PDFJULIO MARTINEZNo ratings yet
- AUZIPREDocument12 pagesAUZIPRENADASHREE BOSE 2248138No ratings yet
- RL ExamplesDocument6 pagesRL ExamplesMihai NanNo ratings yet
- GetachewDocument4 pagesGetachewhundasa chalaNo ratings yet
- Introduction to Two-Dimensional Random VariablesDocument23 pagesIntroduction to Two-Dimensional Random VariablesOnetwothree TubeNo ratings yet
- CS 229 Autumn 2017 Problem Set #3: Deep Learning & Unsupervised LearningDocument9 pagesCS 229 Autumn 2017 Problem Set #3: Deep Learning & Unsupervised Learningnxp HeNo ratings yet
- Test ExamDocument4 pagesTest ExamMOhmedSharafNo ratings yet
- STAT3003 Chapter08Document8 pagesSTAT3003 Chapter08SapphireNo ratings yet
- 6.867 Machine Learning: Mid-Term Exam October 13, 2004Document11 pages6.867 Machine Learning: Mid-Term Exam October 13, 2004Dickson SamwelNo ratings yet
- 41 DeepLearningDocument4 pages41 DeepLearningCaballero Alférez Roy TorresNo ratings yet
- STA 2101 Assignment 1 ReviewDocument8 pagesSTA 2101 Assignment 1 ReviewdflamsheepsNo ratings yet
- QMC Lecture #12 - Quasi Monte Carlo IntegrationDocument20 pagesQMC Lecture #12 - Quasi Monte Carlo IntegrationankiosaNo ratings yet
- Matrices Represent Digital ImagesDocument5 pagesMatrices Represent Digital ImagesSergio SanabriaNo ratings yet
- Chapter 38 guide to discrete choice modelsDocument50 pagesChapter 38 guide to discrete choice modelsTaha NajidNo ratings yet
- Fuzzy 5Document12 pagesFuzzy 5Basma ElNo ratings yet
- Final 2008 FDocument18 pagesFinal 2008 FMuhammad MurtazaNo ratings yet
- Automatic Gradient Threshold Determination For Edge DetectionDocument4 pagesAutomatic Gradient Threshold Determination For Edge Detectionapi-3706534No ratings yet
- Causal InferenceDocument127 pagesCausal InferenceatittiNo ratings yet
- Multivariate Statistical Models Chapter: Covariance, Correlation and Linear CombinationsDocument15 pagesMultivariate Statistical Models Chapter: Covariance, Correlation and Linear CombinationsWOONGCHAE YOONo ratings yet
- Lecture 1: Module Overview: Zhenning Cai August 15, 2019Document5 pagesLecture 1: Module Overview: Zhenning Cai August 15, 2019Liu JianghaoNo ratings yet
- Solutions Problem Set 1Document7 pagesSolutions Problem Set 1sanketjaiswalNo ratings yet
- PrincipalComponentAnalysisofBinaryData - Applicationstoroll Call AnalysisDocument32 pagesPrincipalComponentAnalysisofBinaryData - Applicationstoroll Call Analysisshree_sahaNo ratings yet
- Numerical Methods Image ProcessingDocument14 pagesNumerical Methods Image ProcessingAvro AronnoNo ratings yet
- Plot PrincipalComponentsAnalysisDocument10 pagesPlot PrincipalComponentsAnalysissharmiNo ratings yet
- Stats300a Fall15 Lecture1Document7 pagesStats300a Fall15 Lecture1tristaloidNo ratings yet
- 1 Loglinear Models For Contingency TablesDocument12 pages1 Loglinear Models For Contingency TablesgennydatuinNo ratings yet
- chapter1bDocument35 pageschapter1bemilyNo ratings yet
- 1 Lecture 5b: Probabilistic Perspectives On ML AlgorithmsDocument6 pages1 Lecture 5b: Probabilistic Perspectives On ML AlgorithmsJeremy WangNo ratings yet
- BDocument10 pagesBHoNo ratings yet
- LeastAngle 2002Document44 pagesLeastAngle 2002liuNo ratings yet
- 1960 Max: Qu, Antixing For Minimum Distortion 7Document6 pages1960 Max: Qu, Antixing For Minimum Distortion 7Chathura LakmalNo ratings yet
- NotesDocument97 pagesNotesBexultan MustafinNo ratings yet
- ECON 809: Problem Set 1Document18 pagesECON 809: Problem Set 1Phan Van NamNo ratings yet
- SML and Probit in STATADocument31 pagesSML and Probit in STATADaniel Redel SaavedraNo ratings yet
- CS 229, Summer 2020 Problem Set #1Document14 pagesCS 229, Summer 2020 Problem Set #1nhungNo ratings yet
- Radioactive DecayDocument11 pagesRadioactive Decayliuzihan32320No ratings yet
- HW 7Document4 pagesHW 7adithya604No ratings yet
- A Tutorial of Machine LearningDocument16 pagesA Tutorial of Machine LearningSumod SundarNo ratings yet
- Lab 06 Divided Difference and Lagrange InterpolationDocument8 pagesLab 06 Divided Difference and Lagrange InterpolationUmair Ali ShahNo ratings yet
- Numerical Solution of Ordinary Differential Equations Part 5 - Least Square RegressionDocument23 pagesNumerical Solution of Ordinary Differential Equations Part 5 - Least Square RegressionMelih TecerNo ratings yet
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 pagesCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNo ratings yet
- EEE 3104labsheet Expt 04Document6 pagesEEE 3104labsheet Expt 04Sunvir Rahaman SumonNo ratings yet
- Lecture 12Document24 pagesLecture 12ankiosaNo ratings yet
- Shanghai Jiaotong University Shanghai Advanced Institution of FinanceDocument3 pagesShanghai Jiaotong University Shanghai Advanced Institution of FinanceIvan WangNo ratings yet
- Graph Structured Statistical Inference Thesis ProposalDocument20 pagesGraph Structured Statistical Inference Thesis ProposalaliNo ratings yet
- Maximum Likelihood Blind Source Separation: A Context-Sensitive Generalization of ICADocument7 pagesMaximum Likelihood Blind Source Separation: A Context-Sensitive Generalization of ICADigito DunkeyNo ratings yet
- Computer Vision MCQ's For InterviewDocument12 pagesComputer Vision MCQ's For InterviewMallikarjun patilNo ratings yet
- Rad 6Document16 pagesRad 6digitalnapismenost2022No ratings yet
- Random Forests: N 1 N J X A I X A IDocument12 pagesRandom Forests: N 1 N J X A I X A IendaleNo ratings yet
- CS771 Mid-semester exam: Machine learning tools, techniquesDocument7 pagesCS771 Mid-semester exam: Machine learning tools, techniquesanshulNo ratings yet
- Bifurcations in Nonlinear Networks Initialized With Linear Network Weight SolutionsDocument6 pagesBifurcations in Nonlinear Networks Initialized With Linear Network Weight Solutionschristianfv5No ratings yet
- ASGDDocument18 pagesASGDRogério MainardesNo ratings yet
- Ass 1Document3 pagesAss 1Vibhanshu LodhiNo ratings yet
- Vmls Additional ExercisesDocument66 pagesVmls Additional ExercisesmarcosilvasegoviaNo ratings yet
- Summation by Parts Operators For Finite Difference Approximations of Second-Derivatives With Variable CoefficientsDocument33 pagesSummation by Parts Operators For Finite Difference Approximations of Second-Derivatives With Variable Coefficientsadsfhire fklwjeNo ratings yet
- CHAP3 Decrease and ConquerDocument47 pagesCHAP3 Decrease and ConquerDo DragonNo ratings yet
- Learn Backprop Neural Net RulesDocument19 pagesLearn Backprop Neural Net RulesStefanescu AlexandruNo ratings yet
- Simple Linear Regression (Chapter 11) : Review of Some Inference and Notation: A Common Population Mean ModelDocument24 pagesSimple Linear Regression (Chapter 11) : Review of Some Inference and Notation: A Common Population Mean ModelHaizhou ChenNo ratings yet
- Rolling The Dice FasterDocument4 pagesRolling The Dice Fasterdignor.sign3941No ratings yet
- I'm A Busy Bee: What'S Your Superpower?Document6 pagesI'm A Busy Bee: What'S Your Superpower?Pepe ViyuelaNo ratings yet
- Kinematics/Dynamics Analysis of a SolidWorks Designed Spatial Robot ArmDocument14 pagesKinematics/Dynamics Analysis of a SolidWorks Designed Spatial Robot Armpaulo baptistaNo ratings yet
- EPOS Command Library (P. 164 - 167)Document192 pagesEPOS Command Library (P. 164 - 167)Pepe ViyuelaNo ratings yet
- Mapa2Document1 pageMapa2Pepe ViyuelaNo ratings yet
- C1 Oral Class Practice JobsDocument2 pagesC1 Oral Class Practice JobsPepe ViyuelaNo ratings yet
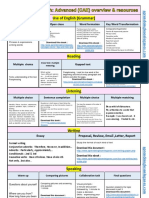
- Use of English (Grammar) : Key Word Transformation Word Formation Open Close Multiple ChoiceDocument1 pageUse of English (Grammar) : Key Word Transformation Word Formation Open Close Multiple ChoicePepe ViyuelaNo ratings yet
- 1147 Uncountable Nouns - List...Document18 pages1147 Uncountable Nouns - List...anestesistaNo ratings yet
- 50 Cae IdiomsDocument53 pages50 Cae Idiomsanestesista89% (36)
- C1 Oral Class Practice EatingDocument2 pagesC1 Oral Class Practice EatingPepe ViyuelaNo ratings yet
- IELTS SHARE 240 Speaking Topics For IeltsDocument78 pagesIELTS SHARE 240 Speaking Topics For Ieltshuhata95% (22)
- Mandatory, Compulsory, ObligatoryDocument1 pageMandatory, Compulsory, ObligatoryPepe ViyuelaNo ratings yet
- Phrasal Verbs, Collocations & Grammar GuideDocument6 pagesPhrasal Verbs, Collocations & Grammar GuidePepe ViyuelaNo ratings yet
- Inversions - TableDocument1 pageInversions - TablePedro Antonio Rodriguez MorenoNo ratings yet
- Prefixes & Suffixes (Nouns, Verbs, Adjetives)Document2 pagesPrefixes & Suffixes (Nouns, Verbs, Adjetives)Pepe ViyuelaNo ratings yet
- Phrasal Prepositional Verbs ListDocument1 pagePhrasal Prepositional Verbs ListManuelNo ratings yet
- SUBJUNTIVE IN ENGLISH (TABLE) + Key Word Transformation ExercisesDocument2 pagesSUBJUNTIVE IN ENGLISH (TABLE) + Key Word Transformation Exercisesanestesista100% (1)
- Information SheetadDocument1 pageInformation SheetadRagnacharNo ratings yet
- Personal and Impersonal Passive (Table + Key Word Transformation Exercises) FCEDocument2 pagesPersonal and Impersonal Passive (Table + Key Word Transformation Exercises) FCEanestesista91% (74)
- CausativeDocument1 pageCausativeHannah_mnesisNo ratings yet
- Advanced Multi Word Verbs PDFDocument1 pageAdvanced Multi Word Verbs PDFReyesNo ratings yet
- Common English Relative Pronouns ExplainedDocument1 pageCommon English Relative Pronouns ExplainedHannah_mnesis100% (1)
- Letter of ComplaintDocument5 pagesLetter of ComplaintPepe ViyuelaNo ratings yet
- Spotlight2e Adv SB Answerkey PDFDocument21 pagesSpotlight2e Adv SB Answerkey PDFAye GarneroNo ratings yet
- BrochureDocument1 pageBrochureRagnacharNo ratings yet
- Letter of ReferenceDocument2 pagesLetter of ReferenceRagnacharNo ratings yet
- Teacher of the Year NominationDocument1 pageTeacher of the Year NominationRagnacharNo ratings yet
- Gapped TextDocument1 pageGapped TextPepe ViyuelaNo ratings yet
- Letter of ApplicationDocument6 pagesLetter of ApplicationAlejandro FuentesNo ratings yet
- Letter To The EditorDocument6 pagesLetter To The EditorRagnacharNo ratings yet
- EssayDocument13 pagesEssayPepe ViyuelaNo ratings yet
- Ethernet Networking EssentialsDocument5 pagesEthernet Networking Essentialsjmiguel000No ratings yet
- Assignment For LawDocument9 pagesAssignment For LawFeroze IshtiaqueNo ratings yet
- Zida Requirements of Renewal FormDocument1 pageZida Requirements of Renewal FormTafadzwa Matthew Gwekwerere P.B.CNo ratings yet
- TPM as a Tool for Better Practices at Roots Industries LtdDocument27 pagesTPM as a Tool for Better Practices at Roots Industries LtdSeif HabbachiNo ratings yet
- Revised Circular On Secretariat Meeting Held On 9th July, 2023Document4 pagesRevised Circular On Secretariat Meeting Held On 9th July, 2023Mohit SoniNo ratings yet
- Esp Module 4Document34 pagesEsp Module 4ELLEN B.SINAHONNo ratings yet
- Modern Coating Additives for SustainabilityDocument8 pagesModern Coating Additives for Sustainabilitynano100% (1)
- 2016 Students ch04 - Lovelock - Developing Service Products - 6e - STUDENTDocument36 pages2016 Students ch04 - Lovelock - Developing Service Products - 6e - STUDENTbold onyxNo ratings yet
- Oracle Forms Developer 10G Student Guide - 1Document440 pagesOracle Forms Developer 10G Student Guide - 1Jayant Agarwal100% (3)
- Inglés C2 Corrector Septiembre 2021Document11 pagesInglés C2 Corrector Septiembre 2021CRISTINA MARTINEZ SANCHEZNo ratings yet
- Power Engineering May 2013Document95 pagesPower Engineering May 2013Portal studentesc - EnergeticaNo ratings yet
- Scheduling and Controllig 2Document41 pagesScheduling and Controllig 2wubiedNo ratings yet
- The Threat Landscape Quiz ResultsDocument5 pagesThe Threat Landscape Quiz ResultsKaskusemail88 EmailNo ratings yet
- This Study Resource Was: Advanced Accounting Ifrs 15Document6 pagesThis Study Resource Was: Advanced Accounting Ifrs 15YukiNo ratings yet
- QuizDocument5 pagesQuizReuven GunawanNo ratings yet
- Ivent201 - Manual de Usuario (220-290)Document71 pagesIvent201 - Manual de Usuario (220-290)Wilber AleluyaNo ratings yet
- Product Information Flyer: Producto RI-923Document2 pagesProduct Information Flyer: Producto RI-923sobheysaidNo ratings yet
- Q12 KeyDocument3 pagesQ12 KeyMuhammad AbdullahNo ratings yet
- Passive Fire Protection PDFDocument7 pagesPassive Fire Protection PDFVictor SampaNo ratings yet
- Exercise Application Linear EquationDocument4 pagesExercise Application Linear EquationWong Zhen FengNo ratings yet
- FINA2209 Financial Planning: Week 3: Indirect Investment and Performance MeasurementDocument43 pagesFINA2209 Financial Planning: Week 3: Indirect Investment and Performance MeasurementDylan AdrianNo ratings yet
- Remote Environment: - Concern The Nature and Direction of Economy in Which A Firm Operates - Types of FactorsDocument27 pagesRemote Environment: - Concern The Nature and Direction of Economy in Which A Firm Operates - Types of FactorsmikiyingNo ratings yet
- Automatic Transmission System SeminarDocument14 pagesAutomatic Transmission System SeminarAnonymous 2YgIckU0No ratings yet
- Mobile Scaffold Inspection ChecklistDocument3 pagesMobile Scaffold Inspection Checklistanthony murphyNo ratings yet
- Content Analysis Research Paper ExampleDocument5 pagesContent Analysis Research Paper Examplefvfzfa5d100% (1)
- Ensure Data Quality in Oracle TCA with DQMDocument17 pagesEnsure Data Quality in Oracle TCA with DQManand.g7720No ratings yet
- SpirentAutomotiveLV124 LV148VDocument38 pagesSpirentAutomotiveLV124 LV148VNiculcea Cristin100% (3)
- Dynamic Arc Recognition and TerminationDocument12 pagesDynamic Arc Recognition and TerminationArun BabuNo ratings yet
- Bill To / Ship To:: Qty Gross Amount Discount Other Charges Taxable Amount CGST SGST/ Ugst Igst Cess Total AmountDocument1 pageBill To / Ship To:: Qty Gross Amount Discount Other Charges Taxable Amount CGST SGST/ Ugst Igst Cess Total AmountAnkit SinghNo ratings yet
- Coverage and Profiling For Real-Time Tiny KernelsDocument6 pagesCoverage and Profiling For Real-Time Tiny Kernelsanusree_bhattacharjeNo ratings yet