You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- ARDUINO Tinkercad Practices - NoDocument116 pagesARDUINO Tinkercad Practices - NoDavidNo ratings yet
- Real-Time Parking Space Monitoring SystemDocument6 pagesReal-Time Parking Space Monitoring SystemsandraNo ratings yet
- Kemajuan dan Rencana Kunci Pintu AnalogDocument4 pagesKemajuan dan Rencana Kunci Pintu AnalogAvianto MarindaNo ratings yet
- Lab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeDocument20 pagesLab Report: Name: Abdul Rehman Khan STD No: 184311 Lab Assistant: MR Oluwatayomi Rereloluwa AdegboyeSikandar AliNo ratings yet
- Void SetupDocument29 pagesVoid SetupAlejandro RojasNo ratings yet
- Jobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDocument26 pagesJobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDwi SuciNo ratings yet
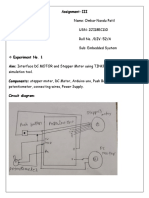
- Name: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemDocument22 pagesName: Omkar Nandu Patil USN: 2JI18EC110 Roll No. /DIV: 52/A Sub: Embedded SystemOMKAR PATILNo ratings yet
- PIR Motion Sensor AlarmDocument46 pagesPIR Motion Sensor AlarmSyad AlyNo ratings yet
- IOT AssignmentDocument8 pagesIOT Assignment09Samrat Bikram ShahNo ratings yet
- All CodesDocument28 pagesAll CodeskarrarNo ratings yet
- Hands 0N With Robotics ComponentsDocument54 pagesHands 0N With Robotics ComponentsSaksham JainNo ratings yet
- Lab 2 - 7 Segment Display and Analog InputsDocument27 pagesLab 2 - 7 Segment Display and Analog Inputsroger david pimienta barrosNo ratings yet
- Code Dieu KhienDocument8 pagesCode Dieu KhienHau VoNo ratings yet
- Notes Arduino NanoDocument10 pagesNotes Arduino NanoManfredHNo ratings yet
- Arduino ExamplesDocument16 pagesArduino ExamplesKapila WijayaratneNo ratings yet
- Arduino LED and sensor exercisesDocument12 pagesArduino LED and sensor exercisesالميمات المتشددNo ratings yet
- H-bridge Robot ControlDocument36 pagesH-bridge Robot ControlmuhamedNo ratings yet
- 7 Segment DisplayDocument30 pages7 Segment DisplayEyedel MehNo ratings yet
- Arduino: Ambient Temperature DisplayDocument10 pagesArduino: Ambient Temperature DisplayRay WongNo ratings yet
- Assignment Experiment - 9Document11 pagesAssignment Experiment - 9Swastik PatiNo ratings yet
- Lab06 - Smart Home Automation Using SensorsDocument14 pagesLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- Connect Three Leds With Arduino and Blink Them in A Sequence and RepeatDocument13 pagesConnect Three Leds With Arduino and Blink Them in A Sequence and RepeatPadya Akhil Sai Vamsi NayakNo ratings yet
- Arduino LED Blink Program Using MbedDocument6 pagesArduino LED Blink Program Using MbedRock SuryaNo ratings yet
- Programming With ArduinoDocument74 pagesProgramming With ArduinoGURSIMRAN SINGHNo ratings yet
- Part-1 PIR Motion Sensor and Servo CodeDocument15 pagesPart-1 PIR Motion Sensor and Servo CodeM Salman RyanNo ratings yet
- CódigotarefaDocument3 pagesCódigotarefaBruno AlvesNo ratings yet
- Arduino LED Blink Code with Button and Sensor InputDocument16 pagesArduino LED Blink Code with Button and Sensor InputhhhangaritaNo ratings yet
- (QUICK START GUIDE) Make An Arduino Capacitance MeterDocument8 pages(QUICK START GUIDE) Make An Arduino Capacitance MeterOussama LabsailiNo ratings yet
- GambarDocument4 pagesGambarNabilaNo ratings yet
- S4AFirmware16 InoDocument5 pagesS4AFirmware16 InoribazetaNo ratings yet
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Document29 pagesInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaNo ratings yet
- 4-digit 7-segment display RTC clockDocument21 pages4-digit 7-segment display RTC clockfrasekh100% (1)
- Dosen Pengampu: Dr. Ir. Fatchul Arifin, M.TDocument29 pagesDosen Pengampu: Dr. Ir. Fatchul Arifin, M.TYuuta KirigayaNo ratings yet
- Arduino Project "Street of LightDocument8 pagesArduino Project "Street of LightValentina GuzmánNo ratings yet
- All Sensor CodeDocument12 pagesAll Sensor CodeEnchantressNo ratings yet
- Arduino Programming BasicsDocument74 pagesArduino Programming BasicsAstha AggarwalNo ratings yet
- Banana Ripeness Detection Using Color SensorDocument15 pagesBanana Ripeness Detection Using Color SensorReyner Jay Sarmiento EnriqueNo ratings yet
- Internet of Things IOT (7,8)Document10 pagesInternet of Things IOT (7,8)himalay gamitNo ratings yet
- Master of Computer Application: 2nd Year, Semester-3Document8 pagesMaster of Computer Application: 2nd Year, Semester-309Samrat Bikram ShahNo ratings yet
- Controls Reviewer 1Document6 pagesControls Reviewer 1John Mer ValdezNo ratings yet
- Fis Alm Q&aDocument8 pagesFis Alm Q&apsekhar08240No ratings yet
- IncludeDocument4 pagesIncludenadaamuffiNo ratings yet
- Fito MarginDocument4 pagesFito MarginnadaamuffiNo ratings yet
- Laporan HS2 02 - OUTPUT Bag2Document5 pagesLaporan HS2 02 - OUTPUT Bag2Gyan Popong EkasatriaNo ratings yet
- VR Vision: InstructablesDocument11 pagesVR Vision: InstructablesdaykonecNo ratings yet
- Function and SyntexDocument8 pagesFunction and SyntexSifatNo ratings yet
- Codingan Pendeteksi GasDocument1 pageCodingan Pendeteksi GasSAID FURQANNo ratings yet
- lab 1Document9 pageslab 1Malik YousafNo ratings yet
- Arduino Worksheet: Control LEDs and Read SensorsDocument5 pagesArduino Worksheet: Control LEDs and Read Sensorsserkan1234No ratings yet
- FitoDocument4 pagesFitonadaamuffiNo ratings yet
- Trabajo 23Document10 pagesTrabajo 23Noé Bonilla maciasNo ratings yet
- DmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentDocument6 pagesDmuXfU4SEeiBcwquuD4ZzA Quiz1 AssignmentJoshikaNo ratings yet
- Sensor ClassDocument33 pagesSensor ClassSaqlain Khan TrexNo ratings yet
- Manual ArduinoDocument15 pagesManual ArduinoBalachandraNo ratings yet
- Ardu5 para S4ADocument6 pagesArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSANo ratings yet
- 19 LampiranDocument31 pages19 LampiranRendongz TokNo ratings yet
- Solution LAB4 IOTDocument3 pagesSolution LAB4 IOTkiritNo ratings yet
- KS0184 Keyestudio Multi-Purpose Shield V2Document9 pagesKS0184 Keyestudio Multi-Purpose Shield V2Xavier MuñozNo ratings yet
- 2017-CPE-03 Habiba ES Lab 11Document7 pages2017-CPE-03 Habiba ES Lab 11Habiba KamranNo ratings yet
- stm32wb55vg PDFDocument183 pagesstm32wb55vg PDFShivbraham Singh RajawatNo ratings yet
- Plastic vs. Metal Fabrication - Advantages and DisadvantagesDocument11 pagesPlastic vs. Metal Fabrication - Advantages and DisadvantagesManikamma LagaleNo ratings yet
- ETAP User Manual Pag 250-500Document249 pagesETAP User Manual Pag 250-500FaVCMNo ratings yet
- AIS Simkin ch10Document54 pagesAIS Simkin ch10SuhardhitaNo ratings yet
- Db2 Blu For Sap: Ferdinand Prezenski - IBM Europe Director of DatabaseDocument18 pagesDb2 Blu For Sap: Ferdinand Prezenski - IBM Europe Director of Databasepush5No ratings yet
- Lecture8 MOS TransistorDocument21 pagesLecture8 MOS TransistorKartika MunirNo ratings yet
- Fv4c - 71pd Carrier EvaporadoraDocument14 pagesFv4c - 71pd Carrier Evaporadoraportatil31164No ratings yet
- 4-Pole Coil Cut Sheet DigitalDocument3 pages4-Pole Coil Cut Sheet DigitalChris AntoniouNo ratings yet
- XK3101 (KM05) User ManualDocument17 pagesXK3101 (KM05) User ManualmanhNo ratings yet
- Ingeteam Solar Energy Presentation - 2019-07 - ENDocument58 pagesIngeteam Solar Energy Presentation - 2019-07 - ENRana Awais KhanNo ratings yet
- Janitza BHB Umg96rm Etl 95 240V enDocument104 pagesJanitza BHB Umg96rm Etl 95 240V enM HuzaifaNo ratings yet
- HENm Series Product Brochure-EN-Ver1 - 0 - 6Document7 pagesHENm Series Product Brochure-EN-Ver1 - 0 - 6გიორგი კირჩხელიNo ratings yet
- 2ndqtrpracticeMT Answer KeyDocument6 pages2ndqtrpracticeMT Answer KeyMysticNo ratings yet
- Analysis of Faults AREVADocument110 pagesAnalysis of Faults AREVAMohammedSaadaniHassani100% (3)
- 2.4GHz Outdoor WiFi System with 50km RangeDocument1 page2.4GHz Outdoor WiFi System with 50km RangeMila KurniasihNo ratings yet
- Zte MF100Document5 pagesZte MF100Santiago CorralesNo ratings yet
- Progress of Phased Array Systems in JapanDocument10 pagesProgress of Phased Array Systems in JapanDhimas AfihandarinNo ratings yet
- Solar MPPT Battery Charger For The Rural Electrification SystemDocument36 pagesSolar MPPT Battery Charger For The Rural Electrification SystemtombalakNo ratings yet
- Manual Operação Computador PAT DS85Document60 pagesManual Operação Computador PAT DS85EdilsonNo ratings yet
- DWDM TrainingDocument47 pagesDWDM TrainingUsman TariqNo ratings yet
- Chicago Electric Inverter Plasma Cutter - 35A Model 45949Document12 pagesChicago Electric Inverter Plasma Cutter - 35A Model 45949trollforgeNo ratings yet
- Omron Blood Pressure Monitor ManualDocument32 pagesOmron Blood Pressure Monitor Manualchuckhsu1248No ratings yet
- TechLife - July 2018 AUDocument116 pagesTechLife - July 2018 AUSamuel Tellez VelazquezNo ratings yet
- Heat Sink Optimization for Electronics CoolingDocument4 pagesHeat Sink Optimization for Electronics CoolingsaqibNo ratings yet
- Energizer L91Document2 pagesEnergizer L91cgmannerheimNo ratings yet
- Microsoft Word - OSDocument254 pagesMicrosoft Word - OSPriyank VarshneyNo ratings yet
- Dok TD Mri3e - 145634 PDFDocument68 pagesDok TD Mri3e - 145634 PDFguto182No ratings yet
- SVP-43763-DWG-ELE-RSAB-008 - GA Capacitor Bank B - R02Document12 pagesSVP-43763-DWG-ELE-RSAB-008 - GA Capacitor Bank B - R02septa ibnuNo ratings yet
- Pneumatics Module 4 Student VersionDocument12 pagesPneumatics Module 4 Student Versionziko23No ratings yet
- George BrakeDocument7 pagesGeorge BrakeJuan Ulin100% (1)