You might also like
- Práctica 1Document16 pagesPráctica 1nachers100% (2)
- Homework 5 - 3Document1 pageHomework 5 - 3FernandoAlmeidaNo ratings yet
- Quantitative Methods For Business 13th Edition by David R Anderson Ebook PDFDocument42 pagesQuantitative Methods For Business 13th Edition by David R Anderson Ebook PDFsamantha.ryan702100% (38)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- ANSYS CFX Tutorials R180 PDFDocument918 pagesANSYS CFX Tutorials R180 PDFVasile GrosuNo ratings yet
- Tugas Personal Ke-2 Minggu 03 / Session 04: ISYE9001 - Engineering OptimizationDocument3 pagesTugas Personal Ke-2 Minggu 03 / Session 04: ISYE9001 - Engineering Optimizationdian wahyuningtyasNo ratings yet
- 18 LinearProgrammingIDocument45 pages18 LinearProgrammingIMuhammad BaqirNo ratings yet
- Linear Programming: Brewer's Problem Simplex Algorithm Implementation Linear ProgrammingDocument49 pagesLinear Programming: Brewer's Problem Simplex Algorithm Implementation Linear ProgrammingFadugbaNo ratings yet
- Fast Adders: See: P&H Chapter 3.1 - 3, C.5 - 6Document18 pagesFast Adders: See: P&H Chapter 3.1 - 3, C.5 - 6Joe PlainNo ratings yet
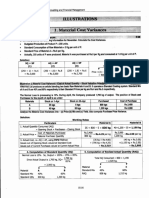
- Standard CostingDocument23 pagesStandard CostingSiddhartha SharmaNo ratings yet
- 4.1 SolutionDocument2 pages4.1 SolutionScribdTranslationsNo ratings yet
- 3 Combinational Logic CircuitDocument100 pages3 Combinational Logic CircuitAnonymous tM7hFSNo ratings yet
- Handout #4: CMOS Arithmetic Logic Unit: CG2027 Transistor-Level Digital CircuitsDocument27 pagesHandout #4: CMOS Arithmetic Logic Unit: CG2027 Transistor-Level Digital CircuitsPeng FeiNo ratings yet
- Shelby Shelving Model: Business AnalyticsDocument32 pagesShelby Shelving Model: Business AnalyticsOm MishraNo ratings yet
- 99LinearProgramming 2x2Document13 pages99LinearProgramming 2x2Rafael Santa MariaNo ratings yet
- Introducing Costs: Opportunity Costs and Sunk CostsDocument15 pagesIntroducing Costs: Opportunity Costs and Sunk CostsV SURENDAR NAIKNo ratings yet
- Chapter 4 Combinational CircuitDocument88 pagesChapter 4 Combinational CircuitfireworkNo ratings yet
- Tugas 1 IPR QmaxDocument7 pagesTugas 1 IPR Qmaxmarnis marnisNo ratings yet
- Arithmetic-Logic Units: CPSC 321 Computer Architecture Andreas KlappeneckerDocument18 pagesArithmetic-Logic Units: CPSC 321 Computer Architecture Andreas KlappeneckerLie NgoNo ratings yet
- LP Balanced Transportation V2Document28 pagesLP Balanced Transportation V2Shaina SantosNo ratings yet
- BayerDocument29 pagesBayerPrabu KusumaNo ratings yet
- Arith 3Document18 pagesArith 3LizzieNo ratings yet
- MA2 (Bat 8 Lecture)Document21 pagesMA2 (Bat 8 Lecture)Nang Phyu Sin Yadanar KyawNo ratings yet
- 4-EC-IES-2013-Conventional Paper-IIDocument6 pages4-EC-IES-2013-Conventional Paper-IIDIGITAL BUSINESSNo ratings yet
- Association Rule Mining - Part IDocument21 pagesAssociation Rule Mining - Part IAlexCooksNo ratings yet
- 4.1 SolutionDocument2 pages4.1 SolutionScribdTranslationsNo ratings yet
- BUB941ZTDocument8 pagesBUB941ZTrun awayNo ratings yet
- Power Amplifier Applications: Absolute Maximum RatingsDocument4 pagesPower Amplifier Applications: Absolute Maximum RatingsmicaelfnNo ratings yet
- Co-Ordination OCPD Cable and LoadDocument10 pagesCo-Ordination OCPD Cable and LoadAppavoo SubbaiyaNo ratings yet
- Chapter. 13: Standard Costing: ProcessDocument5 pagesChapter. 13: Standard Costing: Process832 MANAN SETHIANo ratings yet
- BJT 23Document29 pagesBJT 23Saumitra PandeyNo ratings yet
- ProblemsDocument1 pageProblemsGameplay OrIgInAlINo ratings yet
- MBR20200CT Switch Mode Power RectifierDocument6 pagesMBR20200CT Switch Mode Power Rectifieryb3hgf2222No ratings yet
- MBR20200CT D PDFDocument5 pagesMBR20200CT D PDFWings Techno ServicesNo ratings yet
- AbbDocument38 pagesAbbZhaqir HusseinNo ratings yet
- Arithmetic BackgroundDocument25 pagesArithmetic BackgroundhiperboreoatlantecNo ratings yet
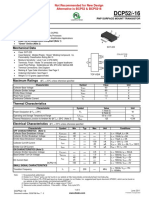
- Features: Not Recommended For New Design Alternative Is BCP52 & BCP5216Document5 pagesFeatures: Not Recommended For New Design Alternative Is BCP52 & BCP5216Yeiner Smith Polo MercadoNo ratings yet
- ACI Column PM Intax Diagram BOUNDARY ELEMENT - 2Document1 pageACI Column PM Intax Diagram BOUNDARY ELEMENT - 2dleechuyNo ratings yet
- Mat Boundary Spring Generator: Input Data & Design SummaryDocument1 pageMat Boundary Spring Generator: Input Data & Design SummaryafvilavilanoriegaNo ratings yet
- 03 Neural Network Proxy Modeling of Complex Oil FedutenkoDocument38 pages03 Neural Network Proxy Modeling of Complex Oil Fedutenkobillal_m_aslamNo ratings yet
- Appendix A5Document4 pagesAppendix A5Thomas StephenNo ratings yet
- S2 2008 Jan Mark SchemeDocument12 pagesS2 2008 Jan Mark Schemechzh_dndb486No ratings yet
- Faculty of Engineering Petroleum EngineeringDocument12 pagesFaculty of Engineering Petroleum EngineeringRoba SaidNo ratings yet
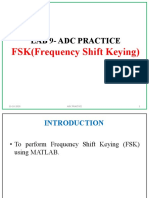
- Lab 9-Adc Practice: FSK (Frequency Shift Keying)Document10 pagesLab 9-Adc Practice: FSK (Frequency Shift Keying)abhishek singhNo ratings yet
- Che 3171 G 5Document1 pageChe 3171 G 5api-538155231No ratings yet
- Single Col - Tank-2013Document35 pagesSingle Col - Tank-2013Hgagselim SelimNo ratings yet
- DSD QB Sol.Document22 pagesDSD QB Sol.Erana RanaNo ratings yet
- Transp LP Transshipment-Updared 1602Document17 pagesTransp LP Transshipment-Updared 1602Mahina NozirovaNo ratings yet
- 2SD669, 2SD669A: Silicon NPN EpitaxialDocument7 pages2SD669, 2SD669A: Silicon NPN EpitaxialManuel SierraNo ratings yet
- Pow Provincial Road - Manolo Fortich 2023 - R1Document179 pagesPow Provincial Road - Manolo Fortich 2023 - R1skmambatanganNo ratings yet
- CSC5200Document8 pagesCSC5200Rampawan YadavNo ratings yet
- Loss Calculation of Contraction and Enlargement - FlowDocument10 pagesLoss Calculation of Contraction and Enlargement - FlowDhammikaDharmasenaNo ratings yet
- Karnaugh Map: Logic OptimizationDocument15 pagesKarnaugh Map: Logic OptimizationTejas PagareNo ratings yet
- HW 9Document2 pagesHW 9sreenath KBNo ratings yet
- This Study Resource Was: Production and Operations AnalysisDocument8 pagesThis Study Resource Was: Production and Operations AnalysisJoli SmithNo ratings yet
- 3.4.4 NAND-only and NOR-only Circuit ImplementationDocument22 pages3.4.4 NAND-only and NOR-only Circuit ImplementationHải Đăng ĐinhNo ratings yet
- EE224 Handout Fast Adders: 1 The ProblemDocument6 pagesEE224 Handout Fast Adders: 1 The ProblemSrishti SharmaNo ratings yet
- Me FirmDocument124 pagesMe Firmrf_1238No ratings yet
- Selected Topics of VLSI Design: Part 3: MultiplicationDocument14 pagesSelected Topics of VLSI Design: Part 3: MultiplicationMuhammad Zeeshan QureshiNo ratings yet
- 2 RP I!?: RT?GS :F - : C E CO L Secondar EDU Ation Certjf IC E A NA ION A Hematics Ap G N R Fic yDocument15 pages2 RP I!?: RT?GS :F - : C E CO L Secondar EDU Ation Certjf IC E A NA ION A Hematics Ap G N R Fic ybruce wayneNo ratings yet
- Presentation On Factory - Team A and BDocument97 pagesPresentation On Factory - Team A and BNazat AfrinNo ratings yet
- 01 Activity 3Document4 pages01 Activity 3Jylian SogocNo ratings yet
- Optimization Using MatlabDocument23 pagesOptimization Using MatlabDaaft PrickNo ratings yet
- Notes PDFDocument25 pagesNotes PDFDaaft PrickNo ratings yet
- Intro To Matlab: Solutions To Exercises: Monique Ebell Studienzentrum GerzenseeDocument6 pagesIntro To Matlab: Solutions To Exercises: Monique Ebell Studienzentrum GerzenseeDaaft PrickNo ratings yet
- Notes 1Document58 pagesNotes 1Daaft PrickNo ratings yet
- Limit of A FunctionDocument30 pagesLimit of A FunctionDaaft Prick100% (1)
- Poms12979 Sup 0001 AppendixDocument10 pagesPoms12979 Sup 0001 AppendixDaaft PrickNo ratings yet
- Automated Fairing of Ship Hull LinesDocument10 pagesAutomated Fairing of Ship Hull LinesReza BabriNo ratings yet
- Customer Clustering Based On Customer Lifetime ValueDocument20 pagesCustomer Clustering Based On Customer Lifetime ValueBesty HNo ratings yet
- Constrained Optimization MatopDocument6 pagesConstrained Optimization MatopPurnanty De Pores Rio GaniNo ratings yet
- Schneider Electric DMS NSDocument31 pagesSchneider Electric DMS NSjnraidoo6724No ratings yet
- Pneumatic Conveying of Bulk Solids PDFDocument231 pagesPneumatic Conveying of Bulk Solids PDFCarloLopez100% (2)
- B.A - B.SC - Statistics - Semester - Pattern2013 PDFDocument17 pagesB.A - B.SC - Statistics - Semester - Pattern2013 PDFAmy HollandNo ratings yet
- Gurobi OptimizationDocument26 pagesGurobi OptimizationAakriti AgarwalNo ratings yet
- R19 EPE EPS Syllabus PDFDocument60 pagesR19 EPE EPS Syllabus PDFSrinivasaraoNo ratings yet
- Pharmaceutical Product Development Unit 4Document19 pagesPharmaceutical Product Development Unit 4Patel HenilNo ratings yet
- Lecture Notes in Artificial Intelligence PDFDocument404 pagesLecture Notes in Artificial Intelligence PDFSparrow JackNo ratings yet
- Reliable Multi-Objective Optimization of High-Speed WEDM Process Based On Gaussian Process RegressionDocument14 pagesReliable Multi-Objective Optimization of High-Speed WEDM Process Based On Gaussian Process RegressionmonilNo ratings yet
- Fausti 2017Document9 pagesFausti 2017everst gouveiaNo ratings yet
- Operations Research II: Chapter 4: Solving LP Problems: Post-Optimality AnalysisDocument37 pagesOperations Research II: Chapter 4: Solving LP Problems: Post-Optimality AnalysisSivmey ChhilNo ratings yet
- Damping Optimization PDFDocument11 pagesDamping Optimization PDFFredy PicaulyNo ratings yet
- Mathematics in Science and Technology - Siddiqi PDFDocument556 pagesMathematics in Science and Technology - Siddiqi PDFJuan Rubén Cueva Salaverry100% (1)
- Modelling and Advanced Process Control For Distillation Columns PDFDocument6 pagesModelling and Advanced Process Control For Distillation Columns PDFgeorge cabreraNo ratings yet
- Deep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueDocument6 pagesDeep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueYing SiNo ratings yet
- Optimization MATLAB ExercisesDocument157 pagesOptimization MATLAB ExercisesJosemarPereiradaSilvaNo ratings yet
- Transportation ProblemDocument18 pagesTransportation ProblemNaveen Kumar PagadalaNo ratings yet
- Summer School Motion Planning PDFDocument134 pagesSummer School Motion Planning PDFAriel OrtizNo ratings yet
- Odule: Pavement Management Systems OverviewDocument29 pagesOdule: Pavement Management Systems Overviewharish babu aluruNo ratings yet
- Short-Term Scheduling of Battery in A Grid-Connected PV-Battery SystemDocument9 pagesShort-Term Scheduling of Battery in A Grid-Connected PV-Battery SystemEric GalvánNo ratings yet
- Pinch Analysis - A Tool For Efficient Use of EnergyDocument107 pagesPinch Analysis - A Tool For Efficient Use of EnergyArvind KumarNo ratings yet
- The Strategic Role of Engineering Asset ManagementDocument25 pagesThe Strategic Role of Engineering Asset ManagementesutjiadiNo ratings yet
- Renewable and Sustainable Energy Reviews: Sunanda Sinha, S.S. ChandelDocument15 pagesRenewable and Sustainable Energy Reviews: Sunanda Sinha, S.S. ChandelSouvik GanguliNo ratings yet
- Lecturenote - 1573170473OR MODULE MengistuDocument163 pagesLecturenote - 1573170473OR MODULE MengistuZena Selfu100% (5)