You might also like
- Modeling of Three-Phase Induction Motor With Two Stator Phases Open-CircuitDocument7 pagesModeling of Three-Phase Induction Motor With Two Stator Phases Open-CircuitMohamed Abdel-Aal MohamedNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Vector Control of Three-Phase Induction Motor With Two Stator Phases Open-CircuitDocument12 pagesVector Control of Three-Phase Induction Motor With Two Stator Phases Open-CircuithaimantiNo ratings yet
- Vector Control of Three-Phase Induction Motor WithDocument11 pagesVector Control of Three-Phase Induction Motor WithNam Trịnh HồngNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Rotating Power Electronics For ELMACH-9Document6 pagesRotating Power Electronics For ELMACH-9yusufNo ratings yet
- Direct Torque Control For The 4-Phase Switched Reluctance Motor DrivesDocument5 pagesDirect Torque Control For The 4-Phase Switched Reluctance Motor Drivesapi-26587237100% (1)
- JETIR2008381Document7 pagesJETIR2008381anthony puyatNo ratings yet
- Speed Control of BLDC Motor Using PID Controller: I J A R E E I EDocument5 pagesSpeed Control of BLDC Motor Using PID Controller: I J A R E E I EAhmed ShoeebNo ratings yet
- 1MRG014321 en Practical Experience With Differential Protection For Converter Transformers PDFDocument10 pages1MRG014321 en Practical Experience With Differential Protection For Converter Transformers PDFSTNo ratings yet
- International Transactions On Electrical Energy Systems - 2018 - Chinmaya - Experimental Analysis of Various Space Vector PDFDocument15 pagesInternational Transactions On Electrical Energy Systems - 2018 - Chinmaya - Experimental Analysis of Various Space Vector PDFPedro Henrique BayerNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Simulation of Automatic Water Level Control System by Using Programmable Logic ControllerDocument8 pagesSimulation of Automatic Water Level Control System by Using Programmable Logic ControllerEditor IJTSRDNo ratings yet
- Design Procedure For Switched-Reluctance Motors: of ofDocument6 pagesDesign Procedure For Switched-Reluctance Motors: of ofSuman SahaNo ratings yet
- Control Strategy For Switched Reluctance Motor With Rotary Encoder Based Rotor Position DetectionDocument10 pagesControl Strategy For Switched Reluctance Motor With Rotary Encoder Based Rotor Position DetectionLukas BudiNo ratings yet
- Comparison of Various PWM Techniques For Field Oriented Control Vsi Fed PMSM DriveDocument9 pagesComparison of Various PWM Techniques For Field Oriented Control Vsi Fed PMSM DrivechaitanyaNo ratings yet
- Dynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkDocument6 pagesDynamic Model Analysis of Three Phase Induction Motor Using Matlab SimulinkSuhail Ahmad SuhailNo ratings yet
- Simulation Model of Hydro Power Plant Using Matlab/SimulinkDocument8 pagesSimulation Model of Hydro Power Plant Using Matlab/Simulinkmanoj kumarNo ratings yet
- Design of Three Phase Voltage Source Inverter (VSI) and Comparative Study With Three Phase Current Source Inverter (CSI)Document14 pagesDesign of Three Phase Voltage Source Inverter (VSI) and Comparative Study With Three Phase Current Source Inverter (CSI)International Journal of Innovative Science and Research TechnologyNo ratings yet
- 45 1530697786 - 04-07-2018 PDFDocument5 pages45 1530697786 - 04-07-2018 PDFrahul sharmaNo ratings yet
- Direct Torque Control For Switched Reluctance Motor (6/4) Powered by PV ArrayDocument5 pagesDirect Torque Control For Switched Reluctance Motor (6/4) Powered by PV ArraySeksan KhamkaewNo ratings yet
- Reasch PaperDocument8 pagesReasch PaperRajveerNo ratings yet
- Design, Prototyping, and Testing of A Dual-Rotor Motor For Electric Vehicle ApplicationDocument8 pagesDesign, Prototyping, and Testing of A Dual-Rotor Motor For Electric Vehicle Applicationpathfinder tamlukNo ratings yet
- Jurnal Inter 2Document6 pagesJurnal Inter 2Maingame 2573No ratings yet
- Performance Analysis of Direct Torque Control of 3-Phase Induction MotorDocument6 pagesPerformance Analysis of Direct Torque Control of 3-Phase Induction MotormaheswaranNo ratings yet
- B4e2 PDFDocument13 pagesB4e2 PDFعلي كامل الاسديNo ratings yet
- Advanced Relaying and ProtectionDocument2 pagesAdvanced Relaying and ProtectionSuhas PatilNo ratings yet
- Advanced Relaying and ProtectionDocument2 pagesAdvanced Relaying and ProtectionSuhas PatilNo ratings yet
- Phase I.M DriveDocument4 pagesPhase I.M DriveJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- FC TCRDocument11 pagesFC TCRChinmay DeshpandeNo ratings yet
- Wind Turbine Modelling and Pitch Angle Control Using PID, Fuzzy and Adaptive Fuzzy Control TechniquesDocument6 pagesWind Turbine Modelling and Pitch Angle Control Using PID, Fuzzy and Adaptive Fuzzy Control TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- European Journal of Electrical Engineering: Received: 30 May 2020 Accepted: 16 November 2020Document8 pagesEuropean Journal of Electrical Engineering: Received: 30 May 2020 Accepted: 16 November 2020Dileep VarmaNo ratings yet
- A New Direct Torque Control For Induction Machine Drive System With Low Torque and Flux Ripples Using XSGDocument12 pagesA New Direct Torque Control For Induction Machine Drive System With Low Torque and Flux Ripples Using XSGLACHARI AchrafNo ratings yet
- Modeling and Simulation of Saturated Induction Motors in Phase QuantitiesDocument8 pagesModeling and Simulation of Saturated Induction Motors in Phase Quantitiesnina kameniNo ratings yet
- CIGRE 2022 Transformer A2 - Full Papers PS1 10433 2022Document11 pagesCIGRE 2022 Transformer A2 - Full Papers PS1 10433 2022albertianusmNo ratings yet
- Speed Control of Universal Motor Using Sniversal BridgeDocument5 pagesSpeed Control of Universal Motor Using Sniversal BridgeIJIERT-International Journal of Innovations in Engineering Research and Technology100% (1)
- An Exploratory Review On Energy Efficient Techniques For DC Drive SystemDocument7 pagesAn Exploratory Review On Energy Efficient Techniques For DC Drive SystemIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- Variable Rotor-Resistance Control of Wind Turbine GeneratorsDocument6 pagesVariable Rotor-Resistance Control of Wind Turbine Generatorssamatar AbdiNo ratings yet
- PID Controller of Speed and Torque of ServoMotor Using MATLABDocument4 pagesPID Controller of Speed and Torque of ServoMotor Using MATLABNader_Al_QahfNo ratings yet
- Torque Speed Characteristics For VSI Fed Squirrel Cage Three Phase IM Drive Using Multi Level InverterDocument4 pagesTorque Speed Characteristics For VSI Fed Squirrel Cage Three Phase IM Drive Using Multi Level InverterIJRASETPublicationsNo ratings yet
- Advanced Relaying and ProtectionDocument2 pagesAdvanced Relaying and ProtectionshivaniNo ratings yet
- Control Strategy For A Five-Leg Inverter Supplying Dual Three-Phase PMSMDocument9 pagesControl Strategy For A Five-Leg Inverter Supplying Dual Three-Phase PMSMYash TatineniNo ratings yet
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkDocument7 pagesModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewNo ratings yet
- Fuzzy-Logic Control of Single - Phase Induction Motor Operated As Two - Phase Induction MotorDocument10 pagesFuzzy-Logic Control of Single - Phase Induction Motor Operated As Two - Phase Induction Motor123456mkNo ratings yet
- SVPWM Based Closed Loop Speed Control of Induction Motor With PSO and SMCDocument9 pagesSVPWM Based Closed Loop Speed Control of Induction Motor With PSO and SMCInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Matlab Simulink Implementation of Switched Reluctance Motor With Direct Torque Control TechniqueDocument7 pagesMatlab Simulink Implementation of Switched Reluctance Motor With Direct Torque Control Techniquemarris09No ratings yet
- Cycloconverters TopologiesDocument12 pagesCycloconverters Topologiesjuan_fimNo ratings yet
- Design and Analysis of A Brushless Doubly Fed Induction Machine With Rotary TransformerDocument6 pagesDesign and Analysis of A Brushless Doubly Fed Induction Machine With Rotary TransformerHuong ThaoNo ratings yet
- 38 Determination PDFDocument6 pages38 Determination PDFriccardo tarelliNo ratings yet
- Speed Control of DC MotorDocument8 pagesSpeed Control of DC MotorsubhamNo ratings yet
- Short-Circuit Current of A Doubly-Fed Induction Generator: Analytical Solution and InsightsDocument6 pagesShort-Circuit Current of A Doubly-Fed Induction Generator: Analytical Solution and InsightsPabloNo ratings yet
- Basic Principles and Functions of ElectricalDocument18 pagesBasic Principles and Functions of ElectricalPraveen KumarNo ratings yet
- Simulation of Three-PhaseDocument4 pagesSimulation of Three-PhasenanostallmannNo ratings yet
- Damping of Resonances at Energization of Power Transformers in ADocument6 pagesDamping of Resonances at Energization of Power Transformers in ARoberto SNo ratings yet
- Chopper Based Speed Control of DC Motor-1260Document6 pagesChopper Based Speed Control of DC Motor-1260Tan Chuan ChetNo ratings yet
- Modelling and Simulation of Wind Turbine Generator in MATLAB/SIMULINKDocument6 pagesModelling and Simulation of Wind Turbine Generator in MATLAB/SIMULINKIJRASETPublicationsNo ratings yet
- ست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلDocument113 pagesست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلMOUHSSINE BEN HAMMOUNo ratings yet
- Analytical Approach To Determine Speed-Torque Curve of Induction Motor From Manufacturer DataDocument4 pagesAnalytical Approach To Determine Speed-Torque Curve of Induction Motor From Manufacturer DataRingoNo ratings yet
- Week 5 Coding Assignment Name: Priyanka Indra Roll No.: 84 Dept: CSE1 Sem: 6Document7 pagesWeek 5 Coding Assignment Name: Priyanka Indra Roll No.: 84 Dept: CSE1 Sem: 6Priyanka IndraNo ratings yet
- Dan Marvin B. Domingo: ObjectiveDocument2 pagesDan Marvin B. Domingo: ObjectiveMark BuendiaNo ratings yet
- Assembling and Operating Instructions Control Udl 2: Montage - Und Bedienungsanleitung Steuerung Udl 2Document20 pagesAssembling and Operating Instructions Control Udl 2: Montage - Und Bedienungsanleitung Steuerung Udl 2Djo100% (1)
- APSRTC Bus Pass Application FormDocument2 pagesAPSRTC Bus Pass Application Formshashikumarsingh7287% (15)
- Quiz 4.1Document3 pagesQuiz 4.1Seniorito LouiesitoNo ratings yet
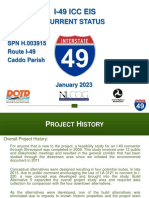
- I-49 Inner-City Connector Study Corridor 3ADocument11 pagesI-49 Inner-City Connector Study Corridor 3ACurtisNo ratings yet
- Design and Development of A Novel Acoustic Rain SeDocument9 pagesDesign and Development of A Novel Acoustic Rain SeRenzo FornelozaNo ratings yet
- Cold Climate Application Guideline DuctlessDocument1 pageCold Climate Application Guideline DuctlessZineddine AlicheNo ratings yet
- Pdca ExampleDocument1 pagePdca Examplerahul kavirajNo ratings yet
- Ruroc Snwboard HelmetDocument1 pageRuroc Snwboard HelmetCata CatalinNo ratings yet
- A5 - HandloomDocument2 pagesA5 - HandloomramstexNo ratings yet
- IndividualAssignment - I22022258 - Information ManagementDocument10 pagesIndividualAssignment - I22022258 - Information ManagementJoan 夏No ratings yet
- Annex B: Application Information For Ampacity CalculationDocument16 pagesAnnex B: Application Information For Ampacity Calculationfa2iiNo ratings yet
- Fan Filter-PriceDocument15 pagesFan Filter-Pricesergio catañoNo ratings yet
- Future of Robotics Agriculture 1Document36 pagesFuture of Robotics Agriculture 1Asma RafiqNo ratings yet
- 11.2.4.4 Packet Tracer - Configuring Port Forwarding On A Linksys Router InstructionsDocument2 pages11.2.4.4 Packet Tracer - Configuring Port Forwarding On A Linksys Router InstructionsLiyanNo ratings yet
- 948te Zf9hp48 Zip inDocument12 pages948te Zf9hp48 Zip inRonald100% (1)
- Travel PlanDocument2 pagesTravel PlanBar & BenchNo ratings yet
- Rate List For HVAC (Updated June 2021)Document6 pagesRate List For HVAC (Updated June 2021)muhammad bilal ahmedNo ratings yet
- Ceba Tundish - SE16-070-001 REV02Document50 pagesCeba Tundish - SE16-070-001 REV02Ricardo PérezNo ratings yet
- Manufacturing Process Audit Excel FormDocument1 pageManufacturing Process Audit Excel Formbhavesh_balasNo ratings yet
- Technology As TutorDocument2 pagesTechnology As TutorE Lai ZaNo ratings yet
- Annual Report 2019 2020Document332 pagesAnnual Report 2019 2020Suresh UppalapatiNo ratings yet
- Icct Colleges Foundation, Inc.: V.V. Soliven Ave - Ii Cainta, RizalDocument7 pagesIcct Colleges Foundation, Inc.: V.V. Soliven Ave - Ii Cainta, RizalRaymond RamirezNo ratings yet
- Principles of InternetDocument41 pagesPrinciples of InternetSekhar AnasaniNo ratings yet
- Chapter 7 Manual TransmissionDocument25 pagesChapter 7 Manual TransmissioncckasNo ratings yet
- Hydro Unit DSC - Control Unit - FasteningDocument3 pagesHydro Unit DSC - Control Unit - FasteningKifah ZaidanNo ratings yet
- Slim and Symmetrical. Every Presentation Will Command AttentionDocument2 pagesSlim and Symmetrical. Every Presentation Will Command AttentionraviezsoftNo ratings yet
- Housekeeping at Construction SitesDocument2 pagesHousekeeping at Construction SitesvladNo ratings yet
- Creating Thematic Maps in MapInfo - Geo InformationDocument9 pagesCreating Thematic Maps in MapInfo - Geo InformationMaxim GhereaNo ratings yet
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AFrom EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANo ratings yet
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Renewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningFrom EverandRenewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningRating: 5 out of 5 stars5/5 (4)
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Performance Management for the Oil, Gas, and Process Industries: A Systems ApproachFrom EverandPerformance Management for the Oil, Gas, and Process Industries: A Systems ApproachRating: 5 out of 5 stars5/5 (3)
- Oil companies and the energy transitionFrom EverandOil companies and the energy transitionNo ratings yet
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Renewable Energy Finance: Theory and PracticeFrom EverandRenewable Energy Finance: Theory and PracticeRating: 4 out of 5 stars4/5 (1)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Offshore Projects and Engineering ManagementFrom EverandOffshore Projects and Engineering ManagementRating: 5 out of 5 stars5/5 (2)
- Advances in Smart Grid Power System: Network, Control and SecurityFrom EverandAdvances in Smart Grid Power System: Network, Control and SecurityAnuradha TomarNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Natural Gas Processing: Technology and Engineering DesignFrom EverandNatural Gas Processing: Technology and Engineering DesignRating: 5 out of 5 stars5/5 (8)
- Handbook of Offshore Oil and Gas OperationsFrom EverandHandbook of Offshore Oil and Gas OperationsRating: 4.5 out of 5 stars4.5/5 (4)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- Case Studies of Material Corrosion Prevention for Oil and Gas ValvesFrom EverandCase Studies of Material Corrosion Prevention for Oil and Gas ValvesNo ratings yet