You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
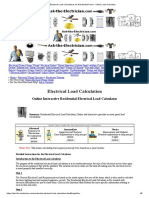
- Electrical Load Calculations For Residential Panel - Online Load CalculatorDocument8 pagesElectrical Load Calculations For Residential Panel - Online Load CalculatorTabrez AlamNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- IOT BASED AIR AND SOUND POLLUTION MONITORING SYSTEM REportDocument36 pagesIOT BASED AIR AND SOUND POLLUTION MONITORING SYSTEM REportakash kumar Singh67% (3)
- UM4730 Installation GuideDocument0 pagesUM4730 Installation Guidenarse8488No ratings yet
- The RC Car BibleDocument196 pagesThe RC Car BibleRully Llama100% (4)
- What Is Web Analytics?: AccentureDocument3 pagesWhat Is Web Analytics?: AccentureGopu MayyalaNo ratings yet
- What Is AI PDFDocument1 pageWhat Is AI PDFGopu MayyalaNo ratings yet
- A Review: Speed Control of Brushless DC Motor: December 2017Document7 pagesA Review: Speed Control of Brushless DC Motor: December 2017Gopu MayyalaNo ratings yet
- Budgit Motor Driven Trolley PDFDocument20 pagesBudgit Motor Driven Trolley PDFGopu MayyalaNo ratings yet
- Automatic Waste Segregation and Monitoring SystemDocument7 pagesAutomatic Waste Segregation and Monitoring SystemGopu Mayyala100% (1)
- Sensorless Control Algorithm JW ParkDocument5 pagesSensorless Control Algorithm JW ParkGopu MayyalaNo ratings yet
- Wipro QuantativeDocument19 pagesWipro QuantativeGopu MayyalaNo ratings yet
- 100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and Answers 1 PDF FreeDocument12 pages100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and Answers 1 PDF FreeJuan Carlos Chamalé Morales100% (1)
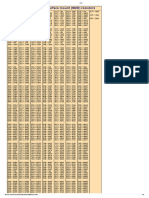
- AWG To Square MM Wire Gauge ConversionDocument2 pagesAWG To Square MM Wire Gauge Conversionsteve_yNo ratings yet
- Crown Micro Xavier 3.6KW5.6KWDocument44 pagesCrown Micro Xavier 3.6KW5.6KWali razaNo ratings yet
- EP06 - Selection of Contactor For Motor Protection and Control - PresentationDocument40 pagesEP06 - Selection of Contactor For Motor Protection and Control - PresentationSita Rama Raju PNo ratings yet
- Tutorial 3 (Cable and Sizing of Conductors) ESB S2 2013 Student VersionDocument5 pagesTutorial 3 (Cable and Sizing of Conductors) ESB S2 2013 Student VersionNajiyah SalehNo ratings yet
- Google Maps: See Results AboutDocument3 pagesGoogle Maps: See Results AboutSergio FernandezNo ratings yet
- Virtual Terminal Delta80T Isobus With Integrated Gps NavigatorDocument10 pagesVirtual Terminal Delta80T Isobus With Integrated Gps NavigatorEvgeni DilovNo ratings yet
- hs75 Monitor Service ManualDocument64 pageshs75 Monitor Service ManualJohnnyNo ratings yet
- Eaton SVX 9000 Manual PDFDocument156 pagesEaton SVX 9000 Manual PDFWaldir CentenoNo ratings yet
- Motor Protection 7SK80 SiemensDocument36 pagesMotor Protection 7SK80 SiemensJames Shuanjun Wang100% (1)
- EIA Marking Code For Surface Mount (SMD) ResistorsDocument1 pageEIA Marking Code For Surface Mount (SMD) ResistorsMajk StoneNo ratings yet
- 46.innovative Congestion Control System For Ambulance Using ZigbeeDocument4 pages46.innovative Congestion Control System For Ambulance Using ZigbeebalabooksNo ratings yet
- Peralatan Atau Equipment CIPS PDFDocument6 pagesPeralatan Atau Equipment CIPS PDFKue Nai NaiNo ratings yet
- NIA Project Registration and PEA DocumentDocument6 pagesNIA Project Registration and PEA DocumentkotiniNo ratings yet
- Manuel For 2hss Close Loop Step Driver PDFDocument35 pagesManuel For 2hss Close Loop Step Driver PDFGiorgio GiuntaNo ratings yet
- Multi-B Busduct FeaturesDocument30 pagesMulti-B Busduct FeaturesSourp VartanNo ratings yet
- Types of Electrical Protection RelayDocument6 pagesTypes of Electrical Protection RelayAnupam0103No ratings yet
- KE-430D BE-438D: Service ManualDocument123 pagesKE-430D BE-438D: Service ManualAnderson luis ParsioNo ratings yet
- Physics 30 Diploma ReviewDocument7 pagesPhysics 30 Diploma ReviewRahulNo ratings yet
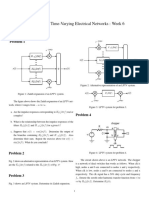
- Noc21 Ee21 Assignment 1 Week 6 PDFDocument1 pageNoc21 Ee21 Assignment 1 Week 6 PDFΜάριος ΗλίαNo ratings yet
- Nx204a PDFDocument2 pagesNx204a PDFArif NstNo ratings yet
- Model 5190-C Temperature/Humidity Probe User's ManualDocument8 pagesModel 5190-C Temperature/Humidity Probe User's ManualNguyễn Văn TrungNo ratings yet
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- IBPS Clerk Main Practice Set 01Document29 pagesIBPS Clerk Main Practice Set 01Sivaranjani VenkatramanNo ratings yet
- Hardware ConfigDocument74 pagesHardware ConfigLuis AngelNo ratings yet
- Operacion de AlmacenajeDocument8 pagesOperacion de Almacenajehelga christenssen ludvquistNo ratings yet