You might also like
- Problem Set ODocument19 pagesProblem Set OnimboNo ratings yet
- 2016 SRP ChladniDocument4 pages2016 SRP ChladniFrane DuiloNo ratings yet
- ASM Subject Guide - Aluminum PDFDocument5 pagesASM Subject Guide - Aluminum PDFzeeshaniqbalNo ratings yet
- Berry Phase Patrick BrunoDocument33 pagesBerry Phase Patrick Brunodyegu1No ratings yet
- Schutz, Bernard. A First Course in General Relativity Solution ManualDocument41 pagesSchutz, Bernard. A First Course in General Relativity Solution ManualUzmar GómezNo ratings yet
- SFC FranchiseDocument10 pagesSFC FranchisecorinacretuNo ratings yet
- Seam 325 Prelim Exam ReviewerDocument6 pagesSeam 325 Prelim Exam ReviewerKyle Steven CaymeNo ratings yet
- SUMMATIVE TEST NO 3. Aristotle Concept of MotionDocument2 pagesSUMMATIVE TEST NO 3. Aristotle Concept of MotionGeri Isabel Tampus0% (1)
- Nemat Nasser Periodic Homogénisation 1981Document17 pagesNemat Nasser Periodic Homogénisation 1981auslenderNo ratings yet
- SRB Session5 CentroidsMomentofINERTIADocument4 pagesSRB Session5 CentroidsMomentofINERTIAFullo Flores MarviloneNo ratings yet
- An Automatic Method of Direct Interpretation of Re PDFDocument15 pagesAn Automatic Method of Direct Interpretation of Re PDFIrwansyah RamadhaniNo ratings yet
- Guo 1997Document6 pagesGuo 1997obaidullah.dsuNo ratings yet
- A New Method of in Ter PR Etatio N of Se LF Potential Field DataDocument9 pagesA New Method of in Ter PR Etatio N of Se LF Potential Field DataWelsinsin Kevin SinNo ratings yet
- Bielajew Salvat 2001Document12 pagesBielajew Salvat 2001jiar001No ratings yet
- Free Vibration Analysis of Beams Considering Different Geometric Characteristics and Boundary ConditionsDocument7 pagesFree Vibration Analysis of Beams Considering Different Geometric Characteristics and Boundary ConditionsMaría Del Carmen Cedeño QuijadaNo ratings yet
- Single Camera 3D-Particle Tracking VelocimetryDocument6 pagesSingle Camera 3D-Particle Tracking VelocimetryArcangel Dragon SerpienteNo ratings yet
- Photo Electricity Answer ScriptDocument16 pagesPhoto Electricity Answer ScriptJanaka JayakodyNo ratings yet
- Derivative Analysis of SP AnomaliesDocument8 pagesDerivative Analysis of SP AnomaliesMahfooz HafezNo ratings yet
- 2nd Attempt Final Exam-Term - 2018-2019Document2 pages2nd Attempt Final Exam-Term - 2018-2019alhussenyNo ratings yet
- 2nd Attempt Final Exam-Term - 2019-2020Document2 pages2nd Attempt Final Exam-Term - 2019-2020alhussenyNo ratings yet
- Center of Gravity and Shear Center of Thin-Walled Open-Section Composite BeamsDocument6 pagesCenter of Gravity and Shear Center of Thin-Walled Open-Section Composite Beamsredz00100% (1)
- Linear Non Linear FEMDocument24 pagesLinear Non Linear FEMwial8295No ratings yet
- الايروداينمك ... دكتور نبراس محمدDocument11 pagesالايروداينمك ... دكتور نبراس محمدAli MahmoudNo ratings yet
- A Simplified Method For Natural Frequency Analysis of A Multiple Cracked Beam 2001 Journal of Sound and VibrationDocument15 pagesA Simplified Method For Natural Frequency Analysis of A Multiple Cracked Beam 2001 Journal of Sound and VibrationABHISHEK KUMAR SAHUNo ratings yet
- A Fast Wheel-Rail Forces Calculation Computer CodeDocument13 pagesA Fast Wheel-Rail Forces Calculation Computer CodeMattia IaconoNo ratings yet
- Elastic Buckling of Orthotropic Plates Under Varying Axial StressesDocument8 pagesElastic Buckling of Orthotropic Plates Under Varying Axial StressesManish ShashikantNo ratings yet
- Architecture Absorbing Auc06 Babtie PDFDocument18 pagesArchitecture Absorbing Auc06 Babtie PDFAnupEkboteNo ratings yet
- AE6022 Cp4Document31 pagesAE6022 Cp4Osman PekmutluNo ratings yet
- Preliminary Analysis of The Scaling Exponents in Channel Ow TurbulenceDocument9 pagesPreliminary Analysis of The Scaling Exponents in Channel Ow TurbulencechrissbansNo ratings yet
- Holographic Entanglement Entropy and The Internal SpaceDocument11 pagesHolographic Entanglement Entropy and The Internal SpaceraveneyesdeadNo ratings yet
- Crystal Planes and Miller IndicesDocument12 pagesCrystal Planes and Miller IndicesUpender DhullNo ratings yet
- General Relativity: The Notes: C.P. BurgessDocument166 pagesGeneral Relativity: The Notes: C.P. BurgessBilal HusseinNo ratings yet
- Problem A in Verso 1Document7 pagesProblem A in Verso 1Hernan CastiblancoNo ratings yet
- An Improved Method For The Theoretical Prediction of The Wave Resistance of Transom-Stern Hulls Using A Slender Body ApproachDocument18 pagesAn Improved Method For The Theoretical Prediction of The Wave Resistance of Transom-Stern Hulls Using A Slender Body ApproachhaujesNo ratings yet
- Apcs 2016Document2 pagesApcs 2016アスリアナ イブラヒムNo ratings yet
- Chapter 6 - Moments of InertiaDocument20 pagesChapter 6 - Moments of InertiaLetshego Itumeleng MoahloliNo ratings yet
- Observing Nonclassical Paths by Measuring Bohmian VelocitiesDocument11 pagesObserving Nonclassical Paths by Measuring Bohmian VelocitiesYashNo ratings yet
- Investigation of Dynamic Displacements of Lithographic Press Rubber Roller by Time Average Geometric MoireDocument12 pagesInvestigation of Dynamic Displacements of Lithographic Press Rubber Roller by Time Average Geometric Moirecharles_boyle_3No ratings yet
- Universe: Induced Action For Conformal Higher Spins From Worldline Path IntegralsDocument17 pagesUniverse: Induced Action For Conformal Higher Spins From Worldline Path IntegralsLuis Alejandro García MoraNo ratings yet
- Otter 1966Document24 pagesOtter 1966Pedro SilvaNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- LNH5 - 1996 - Dyn - Amic Finite Element Analysis of A - Chang, Liu - ScienceDocument16 pagesLNH5 - 1996 - Dyn - Amic Finite Element Analysis of A - Chang, Liu - ScienceharshadNo ratings yet
- Aki and Larner 1970Document22 pagesAki and Larner 1970Jenni WangNo ratings yet
- Thompson1987.pdf Boundary ConditionsDocument24 pagesThompson1987.pdf Boundary ConditionsRaul Martinez JardonNo ratings yet
- Elastic Crack Growth in Finite Elements With Minimal Remeshing-Belytschko and Black-1999Document20 pagesElastic Crack Growth in Finite Elements With Minimal Remeshing-Belytschko and Black-1999hahaNo ratings yet
- Finite Element by Tarun KantDocument7 pagesFinite Element by Tarun KantVijayraj11No ratings yet
- Extremum Seeking For Moderately Unstable Systems and For Autonomous Vehicle Target Tracking Without Position MeasurementsDocument8 pagesExtremum Seeking For Moderately Unstable Systems and For Autonomous Vehicle Target Tracking Without Position Measurementsjose luis huayanay villarNo ratings yet
- Analysis of Stress State With The Force Lines Method: E-Mail: Kokch@icm - Krasn.ru, Andrey@Document5 pagesAnalysis of Stress State With The Force Lines Method: E-Mail: Kokch@icm - Krasn.ru, Andrey@AndyNo ratings yet
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 pagesThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsngoclinhbk05No ratings yet
- A Semi-Analytic Ray-Tracing Algorithm For Weak Lensing: Baojiu Li, Lindsay J. King, Gong-Bo Zhao, Hongsheng ZhaoDocument13 pagesA Semi-Analytic Ray-Tracing Algorithm For Weak Lensing: Baojiu Li, Lindsay J. King, Gong-Bo Zhao, Hongsheng ZhaoEntropyPrincipleNo ratings yet
- P. Mein Et Al - Magnetic Flux Tubes Observed With THEMIS/MSDPDocument6 pagesP. Mein Et Al - Magnetic Flux Tubes Observed With THEMIS/MSDPOlmnopNo ratings yet
- The Complete Spectrum of The Area From Recoupling Theory in Loop Quantum GravityDocument12 pagesThe Complete Spectrum of The Area From Recoupling Theory in Loop Quantum GravityPatrick WongNo ratings yet
- Fast Analysis of Large AntennasDocument5 pagesFast Analysis of Large Antennasxmas82No ratings yet
- Ellipse OverlapsDocument11 pagesEllipse Overlapsfiore.mirkoNo ratings yet
- Vaninshing Point Detection PDFDocument0 pagesVaninshing Point Detection PDFUkenderan ElanNo ratings yet
- Geographical Analysis - 2010 - GongDocument13 pagesGeographical Analysis - 2010 - Gongthevenue7No ratings yet
- Simulation of 6DOF Motion of 3D Flying DebrisDocument8 pagesSimulation of 6DOF Motion of 3D Flying DebrisSara SultanaNo ratings yet
- Welcome To The Great Logo Adventure!Document4 pagesWelcome To The Great Logo Adventure!scribdmuthuNo ratings yet
- Corporate Governor in Banking SectorDocument4 pagesCorporate Governor in Banking SectorAcousticParesh PatelNo ratings yet
- 7th Circular Motion SolutionsDocument60 pages7th Circular Motion SolutionsAjay D KumarNo ratings yet
- Monet Brooks CV PDFDocument2 pagesMonet Brooks CV PDFMonet BrooksNo ratings yet
- MineralsDocument40 pagesMineralsGhillian Mae GuiangNo ratings yet
- Rationale of Employee Turnover: An Analysis of Banking Sector in NepalDocument8 pagesRationale of Employee Turnover: An Analysis of Banking Sector in Nepaltempmail5598No ratings yet
- Small Business Management Entrepreneurship and Beyond 6th Edition Hatten Solutions ManualDocument36 pagesSmall Business Management Entrepreneurship and Beyond 6th Edition Hatten Solutions ManualketmieoilstoneqjdnwqNo ratings yet
- Safety Data Sheet According To EEC-Regulation 91/155/EECDocument6 pagesSafety Data Sheet According To EEC-Regulation 91/155/EECANIBALLOPEZVEGANo ratings yet
- Pebble in The Pond by David MerrillDocument22 pagesPebble in The Pond by David MerrillKangdon Lee100% (3)
- TVL IACSS9 12ICCS Ia E28 MNHS SHS CAMALIGDocument4 pagesTVL IACSS9 12ICCS Ia E28 MNHS SHS CAMALIGKattie Alison Lumio MacatuggalNo ratings yet
- Principles of Health EducationDocument3 pagesPrinciples of Health EducationJunah DayaganonNo ratings yet
- Multi Car ParkingDocument33 pagesMulti Car ParkingTanvi KhuranaNo ratings yet
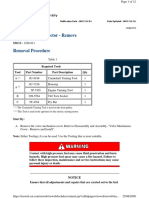
- Electronic Unit Injector - Remove: C6.6 Industrial EngineDocument12 pagesElectronic Unit Injector - Remove: C6.6 Industrial EngineBassieNo ratings yet
- SCE - EN - 032-600 Global Data Blocks - S7-1500 - R1508Document39 pagesSCE - EN - 032-600 Global Data Blocks - S7-1500 - R1508rakesgNo ratings yet
- AlbertEinstein PDFDocument3 pagesAlbertEinstein PDFABDUL ALEEMNo ratings yet
- WPI PharmaceuticalsDocument23 pagesWPI PharmaceuticalsKyle Millar-CorlissNo ratings yet
- Bioshock Audio DiariesDocument6 pagesBioshock Audio DiariesGeorge CuriosoNo ratings yet
- J4500 Basic Electrical Schematics (Epa2017, Gen V) W/Parker VMM, Effective With Unit 68229Document91 pagesJ4500 Basic Electrical Schematics (Epa2017, Gen V) W/Parker VMM, Effective With Unit 68229HamiltonNo ratings yet
- Recovery in Credit GrantedDocument21 pagesRecovery in Credit GrantedMaria Ysabella Yee80% (5)
- CBT Nuggets Ccent & Ccna - Season 1 ListDocument5 pagesCBT Nuggets Ccent & Ccna - Season 1 ListRusu AlexandruNo ratings yet
- QuestionsDocument3 pagesQuestionsRajani NairNo ratings yet
- OCI Introduction: Presented By: Rahul MiglaniDocument21 pagesOCI Introduction: Presented By: Rahul Miglanisss pppNo ratings yet
- LP Grade 8 MolaveDocument19 pagesLP Grade 8 MolaveBlessing Shielo VicenteNo ratings yet
- Chapt 22Document9 pagesChapt 22Rebecca EsNo ratings yet
- B.tech 3 Cse SyllabusDocument65 pagesB.tech 3 Cse SyllabusVijayendra GoudNo ratings yet