You might also like
- Solution Manual For Engineering and Chemical Thermodynamics 2nd Ed - Milo KoretskyDocument20 pagesSolution Manual For Engineering and Chemical Thermodynamics 2nd Ed - Milo KoretskyAbolfazl29% (7)
- Silvaco TCAD Tutorial MOSDocument286 pagesSilvaco TCAD Tutorial MOSThomas Ho100% (4)
- Foam protection Incubator POWer cord Instruction bookletDocument15 pagesFoam protection Incubator POWer cord Instruction bookletsanthosh100% (1)
- Open System (1) ThermodynamicDocument38 pagesOpen System (1) ThermodynamicSakinah KamalNo ratings yet
- 1st International Symposium On Naval Architecture and Maritime INT-NAM 2011, 24-25 October, Istanbul, Turkey PDFDocument126 pages1st International Symposium On Naval Architecture and Maritime INT-NAM 2011, 24-25 October, Istanbul, Turkey PDFYuriyAKNo ratings yet
- Burrill Cavitation Diagram For Uniform Flow (Reproduced From Reference 22)Document1 pageBurrill Cavitation Diagram For Uniform Flow (Reproduced From Reference 22)18847No ratings yet
- Burrill Cavitation Diagram For Uniform Flow (Reproduced From Reference 22)Document1 pageBurrill Cavitation Diagram For Uniform Flow (Reproduced From Reference 22)18847No ratings yet
- 951-130-186-187 Progressive Feeder Block Operation & Assembly PDFDocument47 pages951-130-186-187 Progressive Feeder Block Operation & Assembly PDFZT350No ratings yet
- Reynolds Experiment (Body)Document13 pagesReynolds Experiment (Body)mutencoNo ratings yet
- Numerical Wave Tank For Study Seakeeping of Amphibious VehicleDocument4 pagesNumerical Wave Tank For Study Seakeeping of Amphibious VehicleBinod KumarNo ratings yet
- Experimental Investigation of The PlungeDocument22 pagesExperimental Investigation of The PlungePrakash Duraisamy CITNo ratings yet
- Effects of Transom Stern on Resistance of High Speed CraftDocument8 pagesEffects of Transom Stern on Resistance of High Speed CraftbrsenerNo ratings yet
- Cmo 94007 FuDocument9 pagesCmo 94007 FuHrithin TNo ratings yet
- Msci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsDocument7 pagesMsci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsRoy VeseyNo ratings yet
- Lorentz LinearisationDocument13 pagesLorentz LinearisationDavid BriggsNo ratings yet
- Lec 4Document9 pagesLec 4Mohammad Yusril Iqbal HabibanaNo ratings yet
- Indian Association of Physics Teachers National Standard Examinations 2008 - 2009 Solutions / AnswersDocument7 pagesIndian Association of Physics Teachers National Standard Examinations 2008 - 2009 Solutions / AnswersKshitij SharmaNo ratings yet
- Numerical Analysis: Mass Transport Under WavesDocument19 pagesNumerical Analysis: Mass Transport Under WavesmehdiessaxNo ratings yet
- PHYS 239 Foundations of Modern PhysicsDocument6 pagesPHYS 239 Foundations of Modern PhysicsAnnaNo ratings yet
- SLT GDocument4 pagesSLT GrhythmNo ratings yet
- Introductory Problems: Problems I: Introductory Problems & Collisions in One DimensionDocument4 pagesIntroductory Problems: Problems I: Introductory Problems & Collisions in One DimensionDiego ForeroNo ratings yet
- Architecture Absorbing Auc06 Babtie PDFDocument18 pagesArchitecture Absorbing Auc06 Babtie PDFAnupEkboteNo ratings yet
- PH 531: Electromagnetic Theory IDocument1 pagePH 531: Electromagnetic Theory ISaif IshtiaqueNo ratings yet
- 1 MOS Transistor Models: ENGR 3425: Analog VLSIDocument28 pages1 MOS Transistor Models: ENGR 3425: Analog VLSIIam SoanNo ratings yet
- A Mechanism of The Large-Scale Damping in The CMB AnisotropyDocument31 pagesA Mechanism of The Large-Scale Damping in The CMB AnisotropyFlori Rodriguez HernandezNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Exploring Quantum, Classical and Semi-Classical Chaos in The Stadium BilliardDocument16 pagesExploring Quantum, Classical and Semi-Classical Chaos in The Stadium BilliardDuncan Dunn DundeeNo ratings yet
- Semester EMW-1 Electromagnetic Wave SemesterDocument21 pagesSemester EMW-1 Electromagnetic Wave SemesterVinod MehtaNo ratings yet
- Solitary waves lecture covers KdV, NLS equationsDocument9 pagesSolitary waves lecture covers KdV, NLS equationsSanhita DasNo ratings yet
- Sol 2Document9 pagesSol 2Saif IshtiaqueNo ratings yet
- Waves and Particles: Basic Concepts of Quantum Mechanics: Physics Dep., University College CorkDocument33 pagesWaves and Particles: Basic Concepts of Quantum Mechanics: Physics Dep., University College Corkjainam sharmaNo ratings yet
- Day1Paper5-IHPC-Fully Nonlinear Wave SimulationDocument9 pagesDay1Paper5-IHPC-Fully Nonlinear Wave SimulationZobair Ibn AwalNo ratings yet
- Phy501, HW2 Due Date: 20th OctoberDocument3 pagesPhy501, HW2 Due Date: 20th OctoberBilalAzamNo ratings yet
- IIT Kanpur Physics Problem Set IV Phase Space PlotsDocument4 pagesIIT Kanpur Physics Problem Set IV Phase Space PlotsRajesh ChoudharyNo ratings yet
- 1 s2.0 S0021999100965227 MainDocument20 pages1 s2.0 S0021999100965227 Mainyunfei2023uwaNo ratings yet
- M. Kramer - Propagation and Damping of M +1 and M - 1 Helicon Modes in An Inhomogeneous Plasma ColumnDocument4 pagesM. Kramer - Propagation and Damping of M +1 and M - 1 Helicon Modes in An Inhomogeneous Plasma ColumnHimaszNo ratings yet
- Maxwell Equations TutorialDocument40 pagesMaxwell Equations TutorialAgus MursidiNo ratings yet
- Idges PDFDocument14 pagesIdges PDFBarış ÖzcanNo ratings yet
- Doctors 2023Document24 pagesDoctors 2023Helen DoctorsNo ratings yet
- Test ExamDocument4 pagesTest ExamraynjeremayNo ratings yet
- On The Fall of An Object With Both Linear and Quadratic Air ResistanceDocument4 pagesOn The Fall of An Object With Both Linear and Quadratic Air ResistanceALDO MAYME MARTINEZNo ratings yet
- Free Vibration Analysis of Beams Considering Different Geometric Characteristics and Boundary ConditionsDocument7 pagesFree Vibration Analysis of Beams Considering Different Geometric Characteristics and Boundary ConditionsMaría Del Carmen Cedeño QuijadaNo ratings yet
- Students Dream Box Academy: Guduvanchery / Tambaram / Chrompet / SpkoilDocument8 pagesStudents Dream Box Academy: Guduvanchery / Tambaram / Chrompet / SpkoilSTUDENTS DREAM BOX - CBSENo ratings yet
- c E mc: Pan Pearl River Delta Physics Olympiad 2008 Part-1 (Total 6 Problems) 卷-1(共 6 题)Document8 pagesc E mc: Pan Pearl River Delta Physics Olympiad 2008 Part-1 (Total 6 Problems) 卷-1(共 6 题)Matheus PinheiroNo ratings yet
- Numerical Calculation of Ship Wave Resistance Based On Linear TheoryDocument4 pagesNumerical Calculation of Ship Wave Resistance Based On Linear TheoryvalynoNo ratings yet
- SPH simulation of hydrodynamic problemsDocument13 pagesSPH simulation of hydrodynamic problemsJohnKartmanNo ratings yet
- For The Numerical Simulation of Waves: Absorbing Boundary ConditionsDocument23 pagesFor The Numerical Simulation of Waves: Absorbing Boundary Conditionsleobruno210No ratings yet
- Kemp 2001Document5 pagesKemp 2001hunanlike328No ratings yet
- Ship Fatigue Damage Assessment (Fda) With RamseriesDocument10 pagesShip Fatigue Damage Assessment (Fda) With RamseriesdanielsalpzNo ratings yet
- 2001 - Tuck Et Al. - Ship-Wave Patterns in The Spirit of Michell - IUTAM Conference On Free Surface FlowsDocument8 pages2001 - Tuck Et Al. - Ship-Wave Patterns in The Spirit of Michell - IUTAM Conference On Free Surface FlowsigorNo ratings yet
- C191 - Homework 2: 0 (E) (P) (E) X (P) X (E) y (P) y (E) Z (P) Z (E) + (P) (E) (P) + (E) Z (P) ZDocument2 pagesC191 - Homework 2: 0 (E) (P) (E) X (P) X (E) y (P) y (E) Z (P) Z (E) + (P) (E) (P) + (E) Z (P) ZAparaNo ratings yet
- Field and Wave Sample Paper97-2003Document6 pagesField and Wave Sample Paper97-2003Abhimanyu NainNo ratings yet
- PCFD 05Document8 pagesPCFD 05Saher SaherNo ratings yet
- Rotating Shell of Charge FieldsDocument7 pagesRotating Shell of Charge Fieldshammoudeh13No ratings yet
- SS4201 Fluid and MagnetohydrodynamicsDocument3 pagesSS4201 Fluid and MagnetohydrodynamicsSayantan DuttaNo ratings yet
- 2023 OPhO TheoryDocument10 pages2023 OPhO TheoryNguyễn Trần Minh TríNo ratings yet
- Aps 1996 549860Document4 pagesAps 1996 549860nam321985No ratings yet
- E5Document20 pagesE5ajgangster3No ratings yet
- Linton 1991 - RADIATION AND DIFFRACTION OF WATER WAVES BY A SUBMERGED SPHERE IN FINITE DEPTHDocument14 pagesLinton 1991 - RADIATION AND DIFFRACTION OF WATER WAVES BY A SUBMERGED SPHERE IN FINITE DEPTHNadji ChiNo ratings yet
- Chapter 8Document9 pagesChapter 8laralainey23No ratings yet
- Alejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical ConductivityDocument8 pagesAlejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical ConductivityJuaxmawNo ratings yet
- Brittle DuctileDocument12 pagesBrittle DuctileMahmood KhanNo ratings yet
- Unit 1Document5 pagesUnit 1Sapata KumarNo ratings yet
- Mother Templates For Gravitational Wave ChirpsDocument7 pagesMother Templates For Gravitational Wave Chirpsanca irinaNo ratings yet
- P2214 Homework 14 Solutions - Spring 2011Document7 pagesP2214 Homework 14 Solutions - Spring 2011calcyeeNo ratings yet
- Yayin.c.4 Bi̇ldi̇ri̇ IucDocument9 pagesYayin.c.4 Bi̇ldi̇ri̇ IucIzzet Ufuk CagdasNo ratings yet
- First Public Examination in Physics and PhilosophyDocument5 pagesFirst Public Examination in Physics and PhilosophySifei ZhangNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Design and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004Document11 pagesDesign and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004haujesNo ratings yet
- Comments On Reliable Prediction Accuracy: A Hydrocomp Technical ReportDocument4 pagesComments On Reliable Prediction Accuracy: A Hydrocomp Technical ReporthaujesNo ratings yet
- A Hybrid Method For Predicting Lift and Drag of SemiplaningDocument90 pagesA Hybrid Method For Predicting Lift and Drag of SemiplaninghaujesNo ratings yet
- SAILING YACHT PERFORMANCE: EFFECTS OF HEEL AND LEEWAY ON RESISTANCE AND SIDEFORCEDocument10 pagesSAILING YACHT PERFORMANCE: EFFECTS OF HEEL AND LEEWAY ON RESISTANCE AND SIDEFORCEklzsailingNo ratings yet
- Keys To CAD-CAM in Small Shipyards - Barry, Oetter, Lane, Mercier 1998Document23 pagesKeys To CAD-CAM in Small Shipyards - Barry, Oetter, Lane, Mercier 1998haujesNo ratings yet
- Planing of A Low-Aspect-Ratio Flat Ship at Infinite Froude NumberDocument15 pagesPlaning of A Low-Aspect-Ratio Flat Ship at Infinite Froude NumberhaujesNo ratings yet
- 44Document8 pages44ldigasNo ratings yet
- The Application of Slender Hull Technology in Powered Yacht and Small Commercial CraftDocument12 pagesThe Application of Slender Hull Technology in Powered Yacht and Small Commercial CrafthaujesNo ratings yet
- Dynamic Analysis of Planing Hulls in The Vertical Plane - AkersDocument19 pagesDynamic Analysis of Planing Hulls in The Vertical Plane - AkershaujesNo ratings yet
- RANSE Simulations of Surface Piercing PropellersDocument5 pagesRANSE Simulations of Surface Piercing PropellershaujesNo ratings yet
- Ten Commandments Ship ResistanceDocument7 pagesTen Commandments Ship ResistancenautapronautaNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- Stern Flap For Resistance Reduction of Planing Hull Craft - A Case Study With A Fast Crew Boat Model - Yaakob, Shamsuddin, KingDocument10 pagesStern Flap For Resistance Reduction of Planing Hull Craft - A Case Study With A Fast Crew Boat Model - Yaakob, Shamsuddin, KinghaujesNo ratings yet
- Power - Displ and Semi-Displ HullsDocument7 pagesPower - Displ and Semi-Displ HullsancamardelliNo ratings yet
- $tsu. (:'T ": (: Uu TorDocument23 pages$tsu. (:'T ": (: Uu TorhaujesNo ratings yet
- Designing Propeller Tunnels for High-Speed CraftDocument14 pagesDesigning Propeller Tunnels for High-Speed CraftldigasNo ratings yet
- SAILING YACHT PERFORMANCE: EFFECTS OF HEEL AND LEEWAY ON RESISTANCE AND SIDEFORCEDocument10 pagesSAILING YACHT PERFORMANCE: EFFECTS OF HEEL AND LEEWAY ON RESISTANCE AND SIDEFORCEklzsailingNo ratings yet
- Wave Impact Reduction of Planing BoatsDocument14 pagesWave Impact Reduction of Planing BoatshaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- Comments On Reliable Prediction Accuracy: A Hydrocomp Technical ReportDocument4 pagesComments On Reliable Prediction Accuracy: A Hydrocomp Technical ReporthaujesNo ratings yet
- Drive SelectionDocument2 pagesDrive SelectionhaujesNo ratings yet
- Controllability of High-Speed Craft - St. Pierre, Hackett, Bigler, Quadvlieg 2007Document8 pagesControllability of High-Speed Craft - St. Pierre, Hackett, Bigler, Quadvlieg 2007haujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- An Improved Method For The Theoretical Prediction of The WaveDocument18 pagesAn Improved Method For The Theoretical Prediction of The Waveektanu1No ratings yet
- Estimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReportDocument2 pagesEstimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReporthaujesNo ratings yet
- Stab 2009Document11 pagesStab 2009musebladeNo ratings yet
- A Critical Analysis of Resistance Prediction Using Regression Methods For High Speed Hull Forms PDFDocument15 pagesA Critical Analysis of Resistance Prediction Using Regression Methods For High Speed Hull Forms PDFoceanmaster66No ratings yet
- GT Upgrades Janes-Asme-paperDocument12 pagesGT Upgrades Janes-Asme-papersattellitteNo ratings yet
- Fast Transient Overvoltage in SubstationDocument8 pagesFast Transient Overvoltage in Substationjegadeesh kumarNo ratings yet
- Lesson 4 Type of ErrorsDocument3 pagesLesson 4 Type of ErrorsRachel Villasis100% (1)
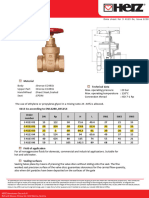
- Herz ValvesDocument11 pagesHerz Valvesat7984582No ratings yet
- Design of Cities: (Edmund N. Bacon) By-Abhiti Rawat and Harsh JaiswalDocument12 pagesDesign of Cities: (Edmund N. Bacon) By-Abhiti Rawat and Harsh JaiswalHarsh JaiswalNo ratings yet
- CJ SeriesDocument4 pagesCJ SeriesChristian Leon BaldeonNo ratings yet
- Maclean ESNA - Fastner - Nyloc Nut PDFDocument94 pagesMaclean ESNA - Fastner - Nyloc Nut PDFVinay PawarNo ratings yet
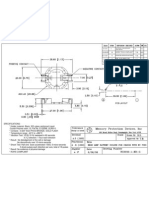
- 10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DDocument1 page10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DyogpanditNo ratings yet
- 175 - XLR8 - SES SubmissionDocument37 pages175 - XLR8 - SES SubmissionGowtham ChNo ratings yet
- Uganda Certificate of Education Physics Paper 4 Time: 2 HoursDocument4 pagesUganda Certificate of Education Physics Paper 4 Time: 2 HoursTamale John PaulNo ratings yet
- Week 7-Transformers Voltage Regulation and Per Unit calculations-ELEC2300Document30 pagesWeek 7-Transformers Voltage Regulation and Per Unit calculations-ELEC2300Look AxxNo ratings yet
- Linear Motion NotesDocument33 pagesLinear Motion NotesPotriyan SivanathanNo ratings yet
- MFDSML 2024 - Iiit NRDocument2 pagesMFDSML 2024 - Iiit NRVijay GopiKrishnanNo ratings yet
- EEE 213 Electronics Devices & Circuits 3 EEE 214 Electronics Devices & Circuits Laboratory 1.5Document4 pagesEEE 213 Electronics Devices & Circuits 3 EEE 214 Electronics Devices & Circuits Laboratory 1.5Khaled faisalNo ratings yet
- MATH1013 2023S1 Worksheet8Document2 pagesMATH1013 2023S1 Worksheet8jacqueline linNo ratings yet
- Analysis of BeamsDocument14 pagesAnalysis of Beamsمحسن عبدالله البركيNo ratings yet
- Rosemount 8800 Series Vortex Flow Meters: CloseDocument5 pagesRosemount 8800 Series Vortex Flow Meters: ClosekEWQ 865kNo ratings yet
- Manish Verma - 2019174 - A1Document2 pagesManish Verma - 2019174 - A1Manish kumar vermaNo ratings yet
- Mathematics Question Paper Set CDocument3 pagesMathematics Question Paper Set CADITHYA SUJINo ratings yet
- Structural, Elastic, Electronic, Magnetic and Thermoelectric Properties of New Quaternary Heusler Compounds Cozrmnx (X Al, Ga, Ge, In)Document36 pagesStructural, Elastic, Electronic, Magnetic and Thermoelectric Properties of New Quaternary Heusler Compounds Cozrmnx (X Al, Ga, Ge, In)yasmine bouldiabNo ratings yet
- Chapter 6 MOTION IN A PLANEDocument25 pagesChapter 6 MOTION IN A PLANEJust CharacterNo ratings yet
- Nucl - Phys.B v.604Document614 pagesNucl - Phys.B v.604buddy72No ratings yet
- Second Set of Slides Notes PDFDocument23 pagesSecond Set of Slides Notes PDFJustina MweendiNo ratings yet
- Intuitive Intelligence: Accessing The Wisdom of Head, Heart and HaraDocument5 pagesIntuitive Intelligence: Accessing The Wisdom of Head, Heart and HaradNo ratings yet
- Combined Cycle Plant PerformanceDocument1 pageCombined Cycle Plant PerformanceseshatsNo ratings yet