You might also like
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Optimizing Planetary Gears PDFDocument7 pagesOptimizing Planetary Gears PDFyildyusuf100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Theory of Reflection Reflection and Transmission of Electromagnetic Particle and Acoustic WavesDocument539 pagesTheory of Reflection Reflection and Transmission of Electromagnetic Particle and Acoustic Wavessouhail100% (1)
- Experiment 9 FinalDocument7 pagesExperiment 9 FinalGneiss Louie Gem AlmazanNo ratings yet
- Chemcon 2015 ProgramDocument13 pagesChemcon 2015 ProgramSutanwi LahiriNo ratings yet
- Examples of Toughened Ceramics 2: MME 467 Ceramics For Advanced ApplicationsDocument26 pagesExamples of Toughened Ceramics 2: MME 467 Ceramics For Advanced ApplicationsMd. Rafiqul IslamNo ratings yet
- 4th Sem GTDocument8 pages4th Sem GTASHIK BELLARYNo ratings yet
- Chapter 17Document16 pagesChapter 17HarishChoudharyNo ratings yet
- Laboratory 1 - Measurements and UncertaintiesDocument8 pagesLaboratory 1 - Measurements and UncertaintiesSmilindNo ratings yet
- Rotor Creep and Speed Detector: ApplicationsDocument3 pagesRotor Creep and Speed Detector: ApplicationsBalu MNo ratings yet
- CH 08 CDocument30 pagesCH 08 CAnonymous ncBe0B9bNo ratings yet
- ITT American Electric HPS Cutoff Luminaire Series 53-54-153-154 Spec Sheet 5-80Document8 pagesITT American Electric HPS Cutoff Luminaire Series 53-54-153-154 Spec Sheet 5-80Alan MastersNo ratings yet
- FTO WO3 BiVO4 by Spin CoatingDocument6 pagesFTO WO3 BiVO4 by Spin Coatingvulinh19No ratings yet
- Transformer Maintenance at Swaziland Electricity Company (S.E.C.) : A Critical InvestigationDocument119 pagesTransformer Maintenance at Swaziland Electricity Company (S.E.C.) : A Critical InvestigationKatamba RogersNo ratings yet
- F321 CalculationsDocument21 pagesF321 CalculationsDoc_CrocNo ratings yet
- A3 FEA of A Simple Cantilever BeamDocument6 pagesA3 FEA of A Simple Cantilever BeamDavid LamNo ratings yet
- Catenary CablesDocument110 pagesCatenary CablesErnie Ernie100% (1)
- 07Document25 pages07supriyo1970No ratings yet
- 1992 - A Method For Registration of 3-D Shapes - ICP - OKDocument18 pages1992 - A Method For Registration of 3-D Shapes - ICP - OKluongxuandanNo ratings yet
- Units of SolutionsDocument17 pagesUnits of SolutionsamoNo ratings yet
- 18MEC108T 120 Zoomed Syllabus-Rotated PDFDocument2 pages18MEC108T 120 Zoomed Syllabus-Rotated PDFChatrapal SinghNo ratings yet
- Watermark Operating Instructions 2Document8 pagesWatermark Operating Instructions 2Pedro Salazar RojasNo ratings yet
- Ch01 - SE 1.4Document12 pagesCh01 - SE 1.4GeorgeNo ratings yet
- Note CHP 1-Material Science 281 Uitm Em110Document59 pagesNote CHP 1-Material Science 281 Uitm Em110bino_rye100% (3)
- 100 Reasons To Be A Scientist by ICTPDocument268 pages100 Reasons To Be A Scientist by ICTPsukuya100% (1)
- Dynamic Period and Inhour EquationsDocument5 pagesDynamic Period and Inhour EquationsDinkar100% (1)
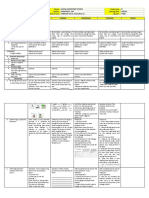
- DLL - SCIENCE 4 - Q3 - WEEK 2 Explain The Effects of Force@edumaymay@lauramosDocument7 pagesDLL - SCIENCE 4 - Q3 - WEEK 2 Explain The Effects of Force@edumaymay@lauramosjeraldine endenoNo ratings yet
- Course Outline MMSC Monte Carlo MethodsDocument4 pagesCourse Outline MMSC Monte Carlo MethodsLatosha TrevinoNo ratings yet
- KCC DataSheet LT313ENGDocument2 pagesKCC DataSheet LT313ENGNasir AnsariNo ratings yet
- Pipeline Stress Analysis With Caesar IIDocument16 pagesPipeline Stress Analysis With Caesar IIzafarbadalNo ratings yet