You might also like
- Instant Assessments for Data Tracking, Grade 4: MathFrom EverandInstant Assessments for Data Tracking, Grade 4: MathRating: 5 out of 5 stars5/5 (2)
- Buck 1948Document9 pagesBuck 1948Carlos Mora100% (1)
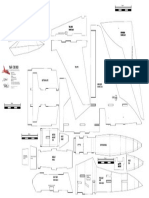
- Yak-130 MJ 5-inch model plane assembly guideDocument1 pageYak-130 MJ 5-inch model plane assembly guideAlejandro Lablée0% (2)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Harmonic Excitation and Response Spectrum AnalysisDocument54 pagesHarmonic Excitation and Response Spectrum AnalysisAayisha S AHAMED100% (1)
- An Introduction To Closed Loop MarketingDocument40 pagesAn Introduction To Closed Loop MarketingGeorgiana VasilescuNo ratings yet
- Comparative ratings of heavy duty cablesDocument1 pageComparative ratings of heavy duty cablesshivani76% (25)
- Colorful Chalkboard Classroom Labels and OrganizersFrom EverandColorful Chalkboard Classroom Labels and OrganizersNo ratings yet
- Training MatrixDocument2 pagesTraining MatrixAmeerHamzaWarraichNo ratings yet
- PBN Manual - ICAO Doc 9613 Final 5.10.08Document294 pagesPBN Manual - ICAO Doc 9613 Final 5.10.08Liviu Per100% (4)
- PLC BASIC 1 AutomationDocument21 pagesPLC BASIC 1 AutomationYogi wimi syaputraNo ratings yet
- Diagrama Eléctrico 773BDocument2 pagesDiagrama Eléctrico 773BLucia BarrazaNo ratings yet
- YASHICA MAT-124 User's ManualDocument34 pagesYASHICA MAT-124 User's Manuallegrandew100% (1)
- Mesuring Tape HE - mt.001Document2 pagesMesuring Tape HE - mt.001Chethan Nagaraju KumbarNo ratings yet
- Human Rights Law IntroductionDocument8 pagesHuman Rights Law IntroductionXander ZingapanNo ratings yet
- SM-A102N Manual de Servicio Anibal Garcia IrepaiDocument37 pagesSM-A102N Manual de Servicio Anibal Garcia IrepaiJoaquin Koki Ventura100% (1)
- Timer Quick Start Guide: 2. Mount Timer 8. Additional Features 7. Program Timer Download The Orbit B-Hyve Lite AppDocument2 pagesTimer Quick Start Guide: 2. Mount Timer 8. Additional Features 7. Program Timer Download The Orbit B-Hyve Lite AppScott WNo ratings yet
- Wrong Way Soreboard - Tabellenblatt1Document3 pagesWrong Way Soreboard - Tabellenblatt1Hrvoje PizekNo ratings yet
- Eve PI Diagrams v1 4Document6 pagesEve PI Diagrams v1 4Gustavo Alexandre SchefferNo ratings yet
- Example Ship SheetDocument2 pagesExample Ship SheetmatthaeusbmNo ratings yet
- Mondelez International (Formerly Cadbury India LTD.) : Project at A GlanceDocument15 pagesMondelez International (Formerly Cadbury India LTD.) : Project at A GlanceKSXNo ratings yet
- Fini - Mci - 50hp - PDF FiniDocument4 pagesFini - Mci - 50hp - PDF FinisebastianNo ratings yet
- Quantum Autoencoders With Enhanced Data EncodingDocument7 pagesQuantum Autoencoders With Enhanced Data EncodingfoobarukNo ratings yet
- 315b L PDFDocument2 pages315b L PDFДрагиша Небитни ТрифуновићNo ratings yet
- Winidea Build 9.17.172.0.109652 Test Report: Renesas Rh850Document2 pagesWinidea Build 9.17.172.0.109652 Test Report: Renesas Rh850mohammedNo ratings yet
- SOSIALISASI PEMAKAIAN BBM DAN JURNAL KAPAL Rev.1Document13 pagesSOSIALISASI PEMAKAIAN BBM DAN JURNAL KAPAL Rev.1Gusti RahmidaNo ratings yet
- ERAC DATASHEET WW en-GBDocument1 pageERAC DATASHEET WW en-GBJavier LópezNo ratings yet
- 785C Plano Hidraulico PDFDocument2 pages785C Plano Hidraulico PDFChristian Vásquez BasilioNo ratings yet
- Huaweigpon PDFDocument1 pageHuaweigpon PDFRobNo ratings yet
- 6 Urban Cruiser (Cont. Next Page) : Engine Control (1NR-FE)Document4 pages6 Urban Cruiser (Cont. Next Page) : Engine Control (1NR-FE)HEMIL ROBERTO RODRIGUEZ HERRERANo ratings yet
- Instruction Manual for StealthCam STC-ZX36NG CameraDocument54 pagesInstruction Manual for StealthCam STC-ZX36NG CameraCarlos ZaniniNo ratings yet
- fda225a3bc8662db188cc33c8c14fa1d939bb2f58cb69bc1a538e0fb0485a8c7_optimDocument3 pagesfda225a3bc8662db188cc33c8c14fa1d939bb2f58cb69bc1a538e0fb0485a8c7_optimmartin.ca2117No ratings yet
- Eve PI Diagrams v1 4Document6 pagesEve PI Diagrams v1 4chrismaccNo ratings yet
- Toaz - Info Yak 130 PRDocument1 pageToaz - Info Yak 130 PRPaul DanielNo ratings yet
- Yak-130 MJ 5-inch model plane assembly guideDocument1 pageYak-130 MJ 5-inch model plane assembly guideHuascar CandiaNo ratings yet
- Cansat Kit Project: Yoshino TsuchiyaDocument28 pagesCansat Kit Project: Yoshino Tsuchiyaanon-449909No ratings yet
- 120H (ES Version)Document2 pages120H (ES Version)Leonardo NunesNo ratings yet
- Katni End to Singrauli End Foot Over Bridge DesignDocument1 pageKatni End to Singrauli End Foot Over Bridge Designdeepak singhNo ratings yet
- List Gambar Penerimaan Klas Rev2Document14 pagesList Gambar Penerimaan Klas Rev2Dolok Joko KenconoNo ratings yet
- Pre101013 2303Document2 pagesPre101013 2303Ching FanNo ratings yet
- Arquitectura Rev. 7.1 OvationDocument1 pageArquitectura Rev. 7.1 Ovationeduard ramosNo ratings yet
- Electrical System 793C Off-Highway Truck: Machine Harness Connector and Component LocationsDocument2 pagesElectrical System 793C Off-Highway Truck: Machine Harness Connector and Component LocationsJerry Alejos GuardapucllaNo ratings yet
- AR-M160 - M205 Circuit PDFDocument20 pagesAR-M160 - M205 Circuit PDFLân SharpNo ratings yet
- DMZ Switches: Wireless SwitchDocument1 pageDMZ Switches: Wireless SwitchAir TopNo ratings yet
- SelectDocument12 pagesSelectAshoka NarayananNo ratings yet
- Sensor Periodic Table 2022Document1 pageSensor Periodic Table 2022plpdspNo ratings yet
- 797Document4 pages797RossellPumaNo ratings yet
- Copernicus Programme Space Component OverviewDocument1 pageCopernicus Programme Space Component OverviewGemmaNo ratings yet
- 320D FMDocument2 pages320D FMFabio AlvesNo ratings yet
- Maxx Force DTusaDocument1 pageMaxx Force DTusaffralbertoNo ratings yet
- NECMicrocontroller GuideDocument8 pagesNECMicrocontroller GuideAldemir Fernando BattagliaNo ratings yet
- PLDT and GLOBE Home Internet ComparisonDocument1 pagePLDT and GLOBE Home Internet ComparisonAir TopNo ratings yet
- Top View: Resultant Consulting EnginersDocument1 pageTop View: Resultant Consulting EnginersEnrique RafaelNo ratings yet
- BMRCL Route Map - New-10-06-2019-Incl Airport PDFDocument1 pageBMRCL Route Map - New-10-06-2019-Incl Airport PDFvinay_mdrNo ratings yet
- Bike ComputerDocument2 pagesBike ComputerpapadoperakisNo ratings yet
- BMRCL Route Map - New-10-06-2019-Incl Airport PDFDocument1 pageBMRCL Route Map - New-10-06-2019-Incl Airport PDFvinay_mdrNo ratings yet
- 315C CFTDocument4 pages315C CFTelectricista85No ratings yet
- 5230 Excavator Electrical System: Machine Harnes Connector and Component LocationsDocument2 pages5230 Excavator Electrical System: Machine Harnes Connector and Component LocationsGilvan JuniorNo ratings yet
- Component Locations: Hydraulic System 730 Ejector Articulated TruckDocument2 pagesComponent Locations: Hydraulic System 730 Ejector Articulated Truckmrcruzito_2099No ratings yet
- SP2582-1-15-3 UmDocument141 pagesSP2582-1-15-3 UmMihai LefterNo ratings yet
- Ecom System Diciembre 2020Document1 pageEcom System Diciembre 2020gamer creativoNo ratings yet
- 2017 Sodi Rental Brochure EnglishDocument23 pages2017 Sodi Rental Brochure Englishjordy gonzalezNo ratings yet
- TH-56415277 Lamtakhong System Configuration R2Document1 pageTH-56415277 Lamtakhong System Configuration R2Panupan ThakongNo ratings yet
- ICE Integrated Concurrent EngineeringDocument60 pagesICE Integrated Concurrent EngineeringEduardo MenaNo ratings yet
- Ficha OrdesaDocument1 pageFicha Ordesaluigi schiavoneNo ratings yet
- OMEGA AIR-CNG Product Overview - EN - 950123Document2 pagesOMEGA AIR-CNG Product Overview - EN - 950123Junaid AhmedNo ratings yet
- International CanSat Workshop - List of Presentation FilesDocument1 pageInternational CanSat Workshop - List of Presentation FilesjjaavvmmNo ratings yet
- International CanSat Workshop - Program and AbstractsDocument30 pagesInternational CanSat Workshop - Program and AbstractsjjaavvmmNo ratings yet
- Norwegian Cansat Competiton and Future Plans: - OutlineDocument9 pagesNorwegian Cansat Competiton and Future Plans: - OutlinejjaavvmmNo ratings yet
- Kita University Tudent Pace Roject (ASSP) and The Noshiro Space EventDocument22 pagesKita University Tudent Pace Roject (ASSP) and The Noshiro Space EventjjaavvmmNo ratings yet
- Cansat Activities in University of Tokyo - Excellent Training For Real Satellite ProjectDocument39 pagesCansat Activities in University of Tokyo - Excellent Training For Real Satellite ProjectjjaavvmmNo ratings yet
- Cansat - Malaysian Plan: Malaysia National Space Agency (Angkasa)Document24 pagesCansat - Malaysian Plan: Malaysia National Space Agency (Angkasa)jjaavvmmNo ratings yet
- The Results Obtained by The YASHAGO Team at ARLISS 2006Document16 pagesThe Results Obtained by The YASHAGO Team at ARLISS 2006jjaavvmmNo ratings yet
- Cansat Development Program in Tokyo Institute of TechnologyDocument16 pagesCansat Development Program in Tokyo Institute of TechnologyjjaavvmmNo ratings yet
- JAXA-Colombia International CanSat Workshop AgendaDocument27 pagesJAXA-Colombia International CanSat Workshop AgendajjaavvmmNo ratings yet
- ICW-23) Kagawa Univ PDFDocument1 pageICW-23) Kagawa Univ PDFjjaavvmmNo ratings yet
- ICW 04) AeropacDocument19 pagesICW 04) AeropacjjaavvmmNo ratings yet
- Experiment on Attitude Control for Solar Power GenerationDocument19 pagesExperiment on Attitude Control for Solar Power GenerationjjaavvmmNo ratings yet
- Nano-Satellite Payload Development at The University of SydneyDocument29 pagesNano-Satellite Payload Development at The University of SydneyjjaavvmmNo ratings yet
- LEEM National CanSat CompetitionDocument12 pagesLEEM National CanSat CompetitionjjaavvmmNo ratings yet
- The Results Obtained by The YASHAGO Team at ARLISS 2006Document16 pagesThe Results Obtained by The YASHAGO Team at ARLISS 2006jjaavvmmNo ratings yet
- First Fly-back of Tohoku University at ARLISS 2006Document8 pagesFirst Fly-back of Tohoku University at ARLISS 2006jjaavvmmNo ratings yet
- CSW Offers Can-Sat Launch Experiment OpportunitiesDocument16 pagesCSW Offers Can-Sat Launch Experiment OpportunitiesjjaavvmmNo ratings yet
- Brosch SmartBird en 8s RZ 110311 LoDocument8 pagesBrosch SmartBird en 8s RZ 110311 LoBagsFNo ratings yet
- SM Chapter1 PDFDocument14 pagesSM Chapter1 PDFgoc1794No ratings yet
- New Avionics Concepts: Yves Saint-Upery Eyak Cockpit OperationsDocument36 pagesNew Avionics Concepts: Yves Saint-Upery Eyak Cockpit OperationsjjaavvmmNo ratings yet
- Evolution of Run-Back RoversDocument46 pagesEvolution of Run-Back RoversjjaavvmmNo ratings yet
- SM Chapter3 PDFDocument20 pagesSM Chapter3 PDFJuan perezNo ratings yet
- ICW-02) Prof TwiggsDocument27 pagesICW-02) Prof TwiggsjjaavvmmNo ratings yet
- Space System 2002 2003Document46 pagesSpace System 2002 2003jjaavvmmNo ratings yet
- Satellite Market SurveyDocument9 pagesSatellite Market Surveyjjaavvmm0% (1)
- Air Traffic Surveillance Data StandardDocument29 pagesAir Traffic Surveillance Data StandardjjaavvmmNo ratings yet
- University Tokyo CUBESAT CanSat projects suborbital experimentsDocument51 pagesUniversity Tokyo CUBESAT CanSat projects suborbital experimentsjjaavvmmNo ratings yet
- Alumni Speaks... : Axay GandhiDocument4 pagesAlumni Speaks... : Axay GandhiSajal MorchhaleNo ratings yet
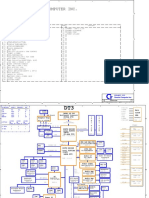
- Acer Aspire 1710 (Quanta DT3) PDFDocument35 pagesAcer Aspire 1710 (Quanta DT3) PDFMustafa AkanNo ratings yet
- Organization Management and LeadershipDocument26 pagesOrganization Management and LeadershipOtilia BadeaNo ratings yet
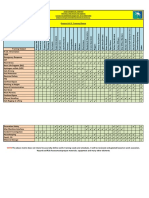
- Prelim Quiz 1 ResultsDocument27 pagesPrelim Quiz 1 Resultsgummy bearNo ratings yet
- Fugacity CoefficientDocument4 pagesFugacity Coefficientsigit1058No ratings yet
- Domestic Water-Supply - TheoryDocument19 pagesDomestic Water-Supply - Theoryyarzar17No ratings yet
- Object Oriented Programming (OOPS) : Java Means Durga SirDocument2 pagesObject Oriented Programming (OOPS) : Java Means Durga SirROHIT JAINNo ratings yet
- The Nigerian Marketing System Its Development - Problems and ProspectsDocument8 pagesThe Nigerian Marketing System Its Development - Problems and ProspectsNwakor Maco Sochi100% (1)
- Pre-Admission Interview Slip TemplateDocument1 pagePre-Admission Interview Slip TemplateLeaniel SilvaNo ratings yet
- Study of NanofibresDocument237 pagesStudy of NanofibresGerardo ZambranoNo ratings yet
- Compendium 2004jan RadiographyDocument11 pagesCompendium 2004jan RadiographyAgus SusilaNo ratings yet
- AlumaCore OPGWDocument1 pageAlumaCore OPGWlepouletNo ratings yet
- Organograma ASME IX Art. I PDFDocument4 pagesOrganograma ASME IX Art. I PDFfabiocorreasilvaNo ratings yet
- Murray NYC Group MeteringDocument5 pagesMurray NYC Group MeteringKannon TamNo ratings yet
- Castro DW 32Document3 pagesCastro DW 32Jeetu GosaiNo ratings yet
- Did You Ever Meet Shattered Illusions?Document5 pagesDid You Ever Meet Shattered Illusions?Junjie HuangNo ratings yet
- Trends in Maternal Mortality: Executive SummaryDocument16 pagesTrends in Maternal Mortality: Executive SummarykansaNo ratings yet
- Toshiba SMMS-7 VRF CatalogueDocument106 pagesToshiba SMMS-7 VRF CatalogueMyo Sein67% (3)
- Lean-burn gas generator sets technical specificationsDocument2 pagesLean-burn gas generator sets technical specificationsHector IuspaNo ratings yet
- Assignment 5: Engineering Utilities IiDocument4 pagesAssignment 5: Engineering Utilities IiRex SabersonNo ratings yet
- International Emergency Nursing: Karen Hammad, Lingli Peng, Olga Anikeeva, Paul Arbon, Huiyun Du, Yinglan LiDocument5 pagesInternational Emergency Nursing: Karen Hammad, Lingli Peng, Olga Anikeeva, Paul Arbon, Huiyun Du, Yinglan LiRuly AryaNo ratings yet
- Agile Assignment 2Document2 pagesAgile Assignment 2Sameen ShakeelNo ratings yet