You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Etd 137Document254 pagesEtd 137Aneez KoyattyNo ratings yet
- Electromagnetic Fields (ELTE 207) : Faculty of EngineeringDocument12 pagesElectromagnetic Fields (ELTE 207) : Faculty of EngineeringRyiadh Al-AreibiNo ratings yet
- DD (Raised Chimney) #FoundationDesign Submission - Rev DDocument387 pagesDD (Raised Chimney) #FoundationDesign Submission - Rev DHikmat B. Ayer - हिक्मत ब. ऐरNo ratings yet
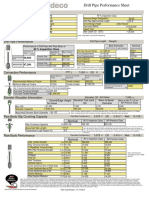
- Drill Pipe Performance Sheet 5.875 XT57 G105Document3 pagesDrill Pipe Performance Sheet 5.875 XT57 G105Garcia C L AlbertoNo ratings yet
- Aerodynamic Aspects of The Final Design of The 1624 M Suspension Bridge Across The Great BeltDocument25 pagesAerodynamic Aspects of The Final Design of The 1624 M Suspension Bridge Across The Great Beltlamkinpark3373No ratings yet
- 1.0 CE-312-Introduction (Spring 2022)Document16 pages1.0 CE-312-Introduction (Spring 2022)Rehman AwanNo ratings yet
- Tutorial Shallow Water FoamDocument26 pagesTutorial Shallow Water FoamdeechibaNo ratings yet
- Chemistry Sample PaperDocument28 pagesChemistry Sample Papercgdtgv hjghgNo ratings yet
- A271731 PDFDocument494 pagesA271731 PDFSãröj ShâhNo ratings yet
- Answer Key Chapter 7Document4 pagesAnswer Key Chapter 7linNo ratings yet
- Abutment - 3+633 Re01Document215 pagesAbutment - 3+633 Re01mayank007aggarwal100% (1)
- Design Considerations For A Gear DriveDocument17 pagesDesign Considerations For A Gear Driveمحمدفیضان چوہدریNo ratings yet
- 202004080644112092leena Sinha Blackbody RadiationDocument32 pages202004080644112092leena Sinha Blackbody RadiationFidel OkothNo ratings yet
- Castigliano's 2nd TheoremDocument29 pagesCastigliano's 2nd TheoremMiddle East100% (4)
- Lecture22 3Document15 pagesLecture22 3Beverly PamanNo ratings yet
- Heat & Thermodynamics by KAMRAN SOOMRODocument8 pagesHeat & Thermodynamics by KAMRAN SOOMROSTUDY.No ratings yet
- Scribd Bypass Download LimitDocument16 pagesScribd Bypass Download LimitMofasa ENo ratings yet
- Circular Motion TheoryDocument27 pagesCircular Motion TheoryMohd MuzammilNo ratings yet
- Newton's Mathematical Explanations About Gravitation Galileo's Experiment On GravitationsDocument1 pageNewton's Mathematical Explanations About Gravitation Galileo's Experiment On GravitationsKrishaNo ratings yet
- Quantum Annealing Algorithm DescriptionDocument21 pagesQuantum Annealing Algorithm DescriptionAlfonso100% (1)
- How To Size A Gas Control ValveDocument10 pagesHow To Size A Gas Control ValvejayakumarNo ratings yet
- @StudyTime - Channel 09 - Work, Energy, Power (TH)Document12 pages@StudyTime - Channel 09 - Work, Energy, Power (TH)Legendary MathematicianNo ratings yet
- Combined Axial and Bending Design R0 2017.12.02Document35 pagesCombined Axial and Bending Design R0 2017.12.02RoxanneDequinaNo ratings yet
- Fluid Mechanics Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument29 pagesFluid Mechanics Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandvihangam yoga chandauli100% (1)
- What Is Difference Between Upper and Lower Yield PointDocument4 pagesWhat Is Difference Between Upper and Lower Yield PointكنوزخطابNo ratings yet
- FM 3e SI Chap01 LectureDocument53 pagesFM 3e SI Chap01 LectureShah KhanNo ratings yet
- 3 (Advances in Quantum Chemistry 3) Per-Olov Löwdin (Eds.) - Academic Press, Elsevier (1967)Document396 pages3 (Advances in Quantum Chemistry 3) Per-Olov Löwdin (Eds.) - Academic Press, Elsevier (1967)Benancio Dorantess100% (1)
- Modern PhysicsDocument3 pagesModern PhysicsBilly BlattNo ratings yet
- Numerical and Experimental Approach For Roll Grinding ProcessDocument7 pagesNumerical and Experimental Approach For Roll Grinding ProcessGinanjar Surya RamadhanNo ratings yet
- BearingsDocument32 pagesBearingsSujit SonawaneNo ratings yet