You might also like
- Clutch TRNGDocument102 pagesClutch TRNGJames Scott Valderrama100% (1)
- 1964 - 1972 Chevelle / El CaminoDocument169 pages1964 - 1972 Chevelle / El Caminotruckshop100% (5)
- Lockout Tagout PlanDocument20 pagesLockout Tagout Planjrmburke69No ratings yet
- Surge AnalysisDocument2 pagesSurge AnalysisPraveen ChaudharyNo ratings yet
- Pemex Short Course: Offshore DrillingDocument67 pagesPemex Short Course: Offshore Drillingdriller22100% (1)
- Spare Parts Catalog: MT-S 3105 Material Number: 4474.054.012 Current Date: 10.08.2000Document12 pagesSpare Parts Catalog: MT-S 3105 Material Number: 4474.054.012 Current Date: 10.08.2000Golbert Golbi0% (1)
- TM 9-1772A WeaselDocument240 pagesTM 9-1772A WeaselAdvocate100% (2)
- 2.20 Marine Hydrodynamics Supplemental ProblemsDocument58 pages2.20 Marine Hydrodynamics Supplemental Problemsjwpaprk1No ratings yet
- Positive Displacement PumpsDocument5 pagesPositive Displacement PumpsGabriel Andrés Barcha Angulo100% (1)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Property of American Airlines: LektroDocument146 pagesProperty of American Airlines: Lektrofernando echavarria 7No ratings yet
- Loading Machine MHL 320: Work AttachmentsDocument4 pagesLoading Machine MHL 320: Work AttachmentsAdi NiNo ratings yet
- 1999RIGAUD EffectsGearboxDesignParametersDocument6 pages1999RIGAUD EffectsGearboxDesignParametersSh.nasirpurNo ratings yet
- Journal of Fluids and Structures: Pascal Hémon, Xavier Amandolese, Thomas AndrianneDocument13 pagesJournal of Fluids and Structures: Pascal Hémon, Xavier Amandolese, Thomas AndrianneReham El- DawyNo ratings yet
- A Numerical Study On The Dynamic Response of A FloDocument10 pagesA Numerical Study On The Dynamic Response of A FloSafwatNo ratings yet
- Qir 2017 - Final (Wiwin S) - RevDocument11 pagesQir 2017 - Final (Wiwin S) - RevKURNIAWANNo ratings yet
- Floating Wind Turbine Motion Assessment: Numerical Simulation Results Compared To Model Test MeasurementsDocument10 pagesFloating Wind Turbine Motion Assessment: Numerical Simulation Results Compared To Model Test MeasurementsRahil KhatriNo ratings yet
- A Comparative Study On The Dynamic Response of Three Semisubmersible Floating Offshore Wind TurbinesDocument11 pagesA Comparative Study On The Dynamic Response of Three Semisubmersible Floating Offshore Wind TurbinesVũ Quý HoàNo ratings yet
- Damianov Dragos FEM RepDocument23 pagesDamianov Dragos FEM RepDragos DamNo ratings yet
- Properties of NREL 5 MW Reference Wind Turbine. Mooring System PropertiesDocument2 pagesProperties of NREL 5 MW Reference Wind Turbine. Mooring System PropertiesAdrNo ratings yet
- 45-@@@EXTREME MOTION RESPONSE ANALYSIS OF MOORED Semi Submersible-1995Document21 pages45-@@@EXTREME MOTION RESPONSE ANALYSIS OF MOORED Semi Submersible-1995Ali Ghasemi Koohi KheiliNo ratings yet
- Nonlinear and Robust Control Schemes For Offshore Steel Jacket PlatformsDocument20 pagesNonlinear and Robust Control Schemes For Offshore Steel Jacket PlatformsBharathNo ratings yet
- Pnas 1903680116 Sapp-1Document14 pagesPnas 1903680116 Sapp-1qrsafasfsaNo ratings yet
- Nonlinear VEH Review Jia r2Document21 pagesNonlinear VEH Review Jia r2ranim najibNo ratings yet
- Mechanical Resonance - Theory and ApplicationsDocument10 pagesMechanical Resonance - Theory and ApplicationsEbrahim Abd El HadyNo ratings yet
- Chaadaev 2009Document6 pagesChaadaev 2009Claude ClaudeNo ratings yet
- Chapter 4-Force VibrationDocument30 pagesChapter 4-Force VibrationAyub Abd RahmanNo ratings yet
- 3.linear WaveDocument35 pages3.linear WavetobysavioNo ratings yet
- Experimental Investigation of The PlungeDocument22 pagesExperimental Investigation of The PlungePrakash Duraisamy CITNo ratings yet
- Mooring and Hydrostatic Restoring of Offshore Floating Wind Turbine PlatformsDocument6 pagesMooring and Hydrostatic Restoring of Offshore Floating Wind Turbine PlatformsEnriqueNo ratings yet
- Jacket LaunchingDocument8 pagesJacket LaunchingBolarinwaNo ratings yet
- Articl DarrieusDocument10 pagesArticl DarrieusMina NorNo ratings yet
- Control of Wave Energy Converters With Discrete Displacement Hydraulic Power Take-Off UnitsDocument24 pagesControl of Wave Energy Converters With Discrete Displacement Hydraulic Power Take-Off UnitsMohamed SaidNo ratings yet
- The Effect of Numerical Integration Stiffness in Ship Motion SimulationDocument13 pagesThe Effect of Numerical Integration Stiffness in Ship Motion SimulationMuhammad Iswar WaharuddinNo ratings yet
- Maximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationDocument19 pagesMaximizing The Efficiency of A Flexible Propulsor Using Experimental OptimizationhaizhouNo ratings yet
- CHAPTER-2 Intoduction To ModelingDocument51 pagesCHAPTER-2 Intoduction To Modelingይታገሡ ተሥፋዬNo ratings yet
- Motion of The BodyDocument10 pagesMotion of The Bodyfery73No ratings yet
- Renewable Energy Unit-4Document4 pagesRenewable Energy Unit-4homoxos344No ratings yet
- The Dynamics of Monopile-Supported Wind Turbines in Nonlinear SoilDocument7 pagesThe Dynamics of Monopile-Supported Wind Turbines in Nonlinear SoilMa RcoNo ratings yet
- IntroductionDocument67 pagesIntroductionMahmoud NassarNo ratings yet
- 6325 05 PDFDocument33 pages6325 05 PDFMatias Montenegro MancillaNo ratings yet
- Analysis and Simulation of The Ultrasonic/Sonic Driller/Corer (USDC)Document11 pagesAnalysis and Simulation of The Ultrasonic/Sonic Driller/Corer (USDC)syahrial_chaniago4769No ratings yet
- Sound WavesDocument19 pagesSound WavesbenyfirstNo ratings yet
- 3B105 8PCEE MaluDocument9 pages3B105 8PCEE MaluGirish MaluNo ratings yet
- Assignment 5 - Paper - Ismail AgniDocument3 pagesAssignment 5 - Paper - Ismail AgniIsmail AgniNo ratings yet
- An Axial Cycloidal Magnetic Gear That Minimizes The Unbalanced Radial ForceDocument10 pagesAn Axial Cycloidal Magnetic Gear That Minimizes The Unbalanced Radial ForceHailin HuangNo ratings yet
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Document6 pagesIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuNo ratings yet
- Cmo 94007 FuDocument9 pagesCmo 94007 FuHrithin TNo ratings yet
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocument7 pagesDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380No ratings yet
- Pelton Turbine TestDocument13 pagesPelton Turbine TestZul FadzliNo ratings yet
- Pdstrip DocumentationDocument45 pagesPdstrip DocumentationNikhil MathewNo ratings yet
- 6.3. Example of Transmission Ratio Assessment 6.3.1. Power-Split Hydro-Mechanical TransmissionDocument2 pages6.3. Example of Transmission Ratio Assessment 6.3.1. Power-Split Hydro-Mechanical TransmissionNita SebastianNo ratings yet
- QIR 2017 - Final (Wiwin S) - ProofreadDocument11 pagesQIR 2017 - Final (Wiwin S) - ProofreadKURNIAWANNo ratings yet
- Ariefka 2019 J. Phys.3A Conf. Ser. 1170 012081Document10 pagesAriefka 2019 J. Phys.3A Conf. Ser. 1170 012081Deana Adelia TabinaNo ratings yet
- A Bottom Mounted Wavemaker in Water Wave Flumes: Journal of Hydraulic ResearchDocument9 pagesA Bottom Mounted Wavemaker in Water Wave Flumes: Journal of Hydraulic ResearchRonaldyn DabuNo ratings yet
- Sowfa TutorialDocument96 pagesSowfa TutorialGolarchNo ratings yet
- Wear Volume 61 Issue 1 1980 (Doi 10.1016 - 0043-1648 (80) 90119-2) Pralay Kumar Das Shiam Sunder Gupta - An Analytical Method To Calculate Misalignment in The Journal Bearing of A Planetary Gear SDocument14 pagesWear Volume 61 Issue 1 1980 (Doi 10.1016 - 0043-1648 (80) 90119-2) Pralay Kumar Das Shiam Sunder Gupta - An Analytical Method To Calculate Misalignment in The Journal Bearing of A Planetary Gear SjavadNo ratings yet
- Mechanical Analog To Ion TrapDocument9 pagesMechanical Analog To Ion TrapDewang Manohar SukhadareNo ratings yet
- Mechanics of The Float Type Wave Energy Conversion: Kesayoshi HadanoDocument7 pagesMechanics of The Float Type Wave Energy Conversion: Kesayoshi HadanoAnonymous 9W8KyQxwNo ratings yet
- A Nonlinear Restoring Effect Study of Mooring System and Its Application by Jian ZhangDocument9 pagesA Nonlinear Restoring Effect Study of Mooring System and Its Application by Jian ZhangTeuku Rachmattra ArvisaNo ratings yet
- Numerical Simulation of Flow-Driven Flapping-Wing Turbines For Wind and Water Power GenerationDocument4 pagesNumerical Simulation of Flow-Driven Flapping-Wing Turbines For Wind and Water Power GenerationLight HouseNo ratings yet
- Ships DynamicDocument18 pagesShips Dynamicanilsingh1983100% (1)
- Macroelement Modeling For Single Vertical Piles - Z. Li, P. Kotronis, S. Escoffier, C. TamagniniDocument10 pagesMacroelement Modeling For Single Vertical Piles - Z. Li, P. Kotronis, S. Escoffier, C. TamagniniStructural SpreadsheetsNo ratings yet
- Pdstrip DocumentationDocument45 pagesPdstrip DocumentationDaeng ParokaNo ratings yet
- Simulation of Unsteady Ship Maneuvering Using Free-Surface RANS SolverDocument19 pagesSimulation of Unsteady Ship Maneuvering Using Free-Surface RANS Solverandevari100% (1)
- An Analytical Model For A Full Wind Turbine WakeDocument14 pagesAn Analytical Model For A Full Wind Turbine Wake조기현No ratings yet
- 222 Spring 2009 PDFDocument363 pages222 Spring 2009 PDFcombatps1No ratings yet
- Wind LectureDocument11 pagesWind LectureJohn TauloNo ratings yet
- 03 Lecture 4 Topic 2 Maintenance StrategiesDocument78 pages03 Lecture 4 Topic 2 Maintenance StrategiesNoman Ullah ChoudharyNo ratings yet
- Effect of Heat Input On Microstructure of Weld by Using 308L As Filler Metal and 304L As Base MetalDocument8 pagesEffect of Heat Input On Microstructure of Weld by Using 308L As Filler Metal and 304L As Base Metalshrikant tambeNo ratings yet
- 825A TolcoDocument1 page825A TolcoANTONIO GUTIERREZ MIRANDANo ratings yet
- 10 - (Beams) Design of Beams Due To Torsion (2016)Document106 pages10 - (Beams) Design of Beams Due To Torsion (2016)Nadeem Hassoon100% (1)
- 265 ME Dismantling JointsDocument2 pages265 ME Dismantling JointsRadicalNo ratings yet
- Lab Report Cee 4200Document5 pagesLab Report Cee 4200Jacob HouNo ratings yet
- Installation Offer For Ventilation System-Fratres 20.02.2023Document2 pagesInstallation Offer For Ventilation System-Fratres 20.02.2023Minhaj RahumanNo ratings yet
- Massey Ferguson MF 3095 TRACTOR Service Parts Catalogue Manual (Part Number 1637211)Document15 pagesMassey Ferguson MF 3095 TRACTOR Service Parts Catalogue Manual (Part Number 1637211)qlb898316No ratings yet
- Component Description For Exhaust Aftertreatment Control UnitDocument2 pagesComponent Description For Exhaust Aftertreatment Control UnitAndrei BaluseNo ratings yet
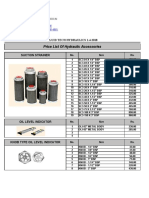
- Price List of Hydraulic Accessories: Fluid Tech Hydraulics 1-4-2018Document1 pagePrice List of Hydraulic Accessories: Fluid Tech Hydraulics 1-4-2018meet dodhiwalaNo ratings yet
- Unit - 2 - Ignition System & Spark Plug TypesDocument30 pagesUnit - 2 - Ignition System & Spark Plug TypesRajesh KumarNo ratings yet
- Brauduino Controller Build1Document18 pagesBrauduino Controller Build1Marlon G. AguiarNo ratings yet
- Spesifikasi Teknis Wind TurbineDocument5 pagesSpesifikasi Teknis Wind TurbineTopik HidayahNo ratings yet
- Directshear TestDocument8 pagesDirectshear TestNani TirumalasettiNo ratings yet
- Installation InstructionsDocument12 pagesInstallation InstructionsAndres CanoNo ratings yet
- Engine Mechanical (4Jj1) 6A-5 EGR System Fuel Filter With SedimenterDocument1 pageEngine Mechanical (4Jj1) 6A-5 EGR System Fuel Filter With SedimenterkevinNo ratings yet
- Liebherr LTM 1160 5 1Document11 pagesLiebherr LTM 1160 5 1Dercio CostaNo ratings yet
- Res 1Document15 pagesRes 1aun_nustNo ratings yet
- Preliminary - : QSX 1 Cummins IncDocument5 pagesPreliminary - : QSX 1 Cummins Incmohammad hazbehzadNo ratings yet
- Remove & Install CamshaftDocument8 pagesRemove & Install CamshaftRichard ChuaNo ratings yet
- Detroit 60 Datos BásicosDocument16 pagesDetroit 60 Datos Básicosvictorhernandezrega100% (1)