You might also like
- Thousands of FREE Books To Read Whenever & Wherever You Like!Document15 pagesThousands of FREE Books To Read Whenever & Wherever You Like!Anonymous ZON7qMNo ratings yet
- Sodium Carbonate FAO PDFDocument18 pagesSodium Carbonate FAO PDFAnonymous ZON7qMNo ratings yet
- How Do You Download A Book From ScribdDocument4 pagesHow Do You Download A Book From ScribdAnonymous ZON7qMNo ratings yet
- Edge-Interior Differences in Vegetation Structure and Composition in A Chaco Semi-Arid Forest, ArgentinaDocument9 pagesEdge-Interior Differences in Vegetation Structure and Composition in A Chaco Semi-Arid Forest, ArgentinaAnonymous ZON7qMNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 3 Deontological Ethics Immanuel KantDocument11 pagesChapter 3 Deontological Ethics Immanuel KantNecheal Cole Angel Mancawan100% (1)
- Hiperfet Power Mosfets Isoplus247 Ixfr 70N15: (Electrically Isolated Backside)Document3 pagesHiperfet Power Mosfets Isoplus247 Ixfr 70N15: (Electrically Isolated Backside)William moreNo ratings yet
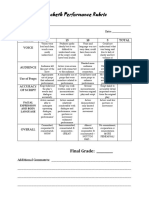
- Macbeth Performance Rubric: Final GradeDocument1 pageMacbeth Performance Rubric: Final GradeRodel BautistaNo ratings yet
- The Road Not TakenDocument7 pagesThe Road Not TakenwinbinsonNo ratings yet
- PEL Sample EssayDocument2 pagesPEL Sample EssayBelle SofiaNo ratings yet
- Practice of Cost Volume Profit Breakeven AnalysisDocument4 pagesPractice of Cost Volume Profit Breakeven AnalysisHafiz Abdulwahab100% (1)
- Intercellular Communication and Signal TransductionDocument20 pagesIntercellular Communication and Signal TransductionBerkaahh ShoppNo ratings yet
- Halal Certification of Insect-Based Food A CritiqueDocument13 pagesHalal Certification of Insect-Based Food A CritiqueAhmadNo ratings yet
- AnglaisDocument6 pagesAnglaistb.thebaultNo ratings yet
- PSYC 444 Sleep Mechanisms and Behaviour Fall 2021 SyllabusDocument9 pagesPSYC 444 Sleep Mechanisms and Behaviour Fall 2021 SyllabusSunnyNo ratings yet
- Dgnotes2012 PDFDocument127 pagesDgnotes2012 PDFSikandar KhanNo ratings yet
- Slave To Religion A Pegging Religious Humiliation EroticaDocument8 pagesSlave To Religion A Pegging Religious Humiliation EroticaWilma PurwaniNo ratings yet
- 2.2. Graham CookDocument9 pages2.2. Graham Cookamin138irNo ratings yet
- Valentine's DayDocument6 pagesValentine's Dayabbyreader07No ratings yet
- Pest Analysis For PadiniDocument13 pagesPest Analysis For PadiniInnocent Diana50% (2)
- Case Study XIIDocument3 pagesCase Study XIIPhoenix The actorNo ratings yet
- AdaTutorialP1 PDFDocument194 pagesAdaTutorialP1 PDFjcfermosellNo ratings yet
- Collins Infinity Flyer 2023Document2 pagesCollins Infinity Flyer 2023Deepak MaliNo ratings yet
- 2021-2022 MIDTERM EXAM IN BENLATC (Nov. 03, 2021)Document9 pages2021-2022 MIDTERM EXAM IN BENLATC (Nov. 03, 2021)kimberlyNo ratings yet
- Knowledge-Based SystemsDocument1 pageKnowledge-Based Systemsbsgindia82No ratings yet
- Group 4 Assignment Campus Deli 1Document9 pagesGroup 4 Assignment Campus Deli 1namitasharma1512100% (4)
- Rock Drilling and DrillabilityDocument57 pagesRock Drilling and Drillabilitybishal pradhan0% (1)
- Bài Tập Từ Đồng Nghĩa Mức Độ: Nhận BiếtDocument15 pagesBài Tập Từ Đồng Nghĩa Mức Độ: Nhận BiếtTấn MinhNo ratings yet
- The Office of The Presidential Adviser On The Peace ProcessDocument9 pagesThe Office of The Presidential Adviser On The Peace ProcessRandel LatozaNo ratings yet
- PP Approval Details - B Channel - 2019Document80 pagesPP Approval Details - B Channel - 2019aman3327No ratings yet
- Brosur Infus-1Document1 pageBrosur Infus-1AKbarNo ratings yet
- 59-65-Speech Signal Enhancement Using Wavelet Threshold MethodsDocument7 pages59-65-Speech Signal Enhancement Using Wavelet Threshold MethodsDeepakIJNo ratings yet
- Shareholders Call For Probe Into Corporate Misconduct at ZCCM-IH 2Document8 pagesShareholders Call For Probe Into Corporate Misconduct at ZCCM-IH 2Zambia InvestorNo ratings yet
- Emory Poster TemplateDocument1 pageEmory Poster TemplateDp PdNo ratings yet
- SHS SLM-CNF Melc6Document34 pagesSHS SLM-CNF Melc6Marnelle Torrecampo50% (2)