You might also like
- PWM Examples: The Original DocumentDocument2 pagesPWM Examples: The Original DocumentPhieta Fairusy FitriaNo ratings yet
- Secrets of Arduino PWMDocument8 pagesSecrets of Arduino PWMpcrmengeNo ratings yet
- Os Segredos Do PWM Do ArduinoDocument6 pagesOs Segredos Do PWM Do ArduinoFernando EsquírioNo ratings yet
- Secrets of Arduino PWMDocument20 pagesSecrets of Arduino PWMDany Setyawan100% (1)
- Safari - 13 Mai 2023 À 09:40Document1 pageSafari - 13 Mai 2023 À 09:40Paréto BessanhNo ratings yet
- 3 Power LED Dimmer Using ATmega32 MicrocontrollerDocument5 pages3 Power LED Dimmer Using ATmega32 MicrocontrollerAmiruddinNo ratings yet
- AN0357Document18 pagesAN0357facebookgerritNo ratings yet
- Assignment 3Document18 pagesAssignment 3Bhakti KalyankastureNo ratings yet
- Sismik 6 - TimerDocument54 pagesSismik 6 - TimermasrinaNo ratings yet
- Lab 1Document9 pagesLab 1Malik YousafNo ratings yet
- DAC Using ATmega 16 PDFDocument4 pagesDAC Using ATmega 16 PDFArun SharmaNo ratings yet
- Digital Signal Processing Project Report: Ihtisham Ul HaqDocument9 pagesDigital Signal Processing Project Report: Ihtisham Ul Haqihtishamul HaqNo ratings yet
- Reading Material - PWM ControlDocument5 pagesReading Material - PWM ControlFantasticMeerNo ratings yet
- Sine Wave GeneratorDocument12 pagesSine Wave GeneratortranvandoanhNo ratings yet
- Sine Wave GeneratorDocument12 pagesSine Wave GeneratorkjfensNo ratings yet
- 10 PWMDocument6 pages10 PWMMikroc Thupati SrinivsNo ratings yet
- Omega2S App Note - Generating PWM SignalsDocument8 pagesOmega2S App Note - Generating PWM SignalsKarthik ManiNo ratings yet
- SolutionDocument3 pagesSolutionTarek AshurNo ratings yet
- CSE 461 LAB SheetDocument9 pagesCSE 461 LAB SheetSaif AhmedNo ratings yet
- NI Tutorial 3254 enDocument5 pagesNI Tutorial 3254 ensteliantsvNo ratings yet
- To Control Speed of DC Motor Using PWM in STM32f407XXDocument4 pagesTo Control Speed of DC Motor Using PWM in STM32f407XXJohn FarandisNo ratings yet
- 1 What Is PWMDocument3 pages1 What Is PWMAmiruddinNo ratings yet
- Atmega328 PWM GenDocument14 pagesAtmega328 PWM GenMarcio Augusto BerenguelNo ratings yet
- Embedded Day 2Document27 pagesEmbedded Day 2199SARAS MISHRANo ratings yet
- DC Motor Speed Control Using ArduinoDocument4 pagesDC Motor Speed Control Using ArduinoAditya RautNo ratings yet
- Lab#6 Power ElectronicDocument4 pagesLab#6 Power Electronicazanmagsi404No ratings yet
- Session 4Document2 pagesSession 4Manoj GudiNo ratings yet
- PWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedDocument15 pagesPWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedSivareddy MudiyalaNo ratings yet
- PWM TutorialDocument2 pagesPWM Tutorialmokhtar80No ratings yet
- Slaa 116Document21 pagesSlaa 116misaelrodrigoNo ratings yet
- Lab 2 Analog Encoder PWM R9Document5 pagesLab 2 Analog Encoder PWM R9subairiNo ratings yet
- MCES - 18CS44 - Unit4 PWM - DCMotorDocument9 pagesMCES - 18CS44 - Unit4 PWM - DCMotorSAKSHAM PRASADNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Frequency MeasurementDocument6 pagesFrequency MeasurementGustavo RiosNo ratings yet
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDocument12 pages16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNo ratings yet
- Erii21 Motor Control PWMDocument12 pagesErii21 Motor Control PWMpallinalvitesNo ratings yet
- Adc PWMDocument26 pagesAdc PWMShivaram Reddy ManchireddyNo ratings yet
- Eeol 2007aug13 Pow Ems Opt An PDFDocument22 pagesEeol 2007aug13 Pow Ems Opt An PDFtimur_okNo ratings yet
- CNT 3Document10 pagesCNT 3sara.adnan2013No ratings yet
- Controlling Servo Motors With AVR MicrocontrollersDocument4 pagesControlling Servo Motors With AVR MicrocontrollersAri Kurniawan S100% (2)
- Direct Digital Synthesis Controlled Pure Sine Wave InverterDocument17 pagesDirect Digital Synthesis Controlled Pure Sine Wave InverterNabil MohammadNo ratings yet
- ProjectDocument25 pagesProject9897856218No ratings yet
- CH 8Document81 pagesCH 8kfaliNo ratings yet
- PWM Outputs Enhance Sensor Signal ConditionersDocument5 pagesPWM Outputs Enhance Sensor Signal Conditionersshabir faridiNo ratings yet
- Using PWM With Code WarriorDocument14 pagesUsing PWM With Code WarriorGowrishankar Gupta100% (1)
- Atmega16: Square Wave GenerationDocument3 pagesAtmega16: Square Wave Generationshahbazalam4a5No ratings yet
- PWM Signal GeneratorsDocument3 pagesPWM Signal GeneratorsjalalhNo ratings yet
- LED Brightness Control Using PWM of LPC2138: ESD Lab Mini-ProjectDocument8 pagesLED Brightness Control Using PWM of LPC2138: ESD Lab Mini-ProjectAditya GadgilNo ratings yet
- EncoderDocument3 pagesEncoderRicardo Reguera AlvarezNo ratings yet
- Atmel PWM Fan ControlDocument10 pagesAtmel PWM Fan ControlArijan BogovićNo ratings yet
- Basics of InvertersDocument12 pagesBasics of InvertersTatenda BizureNo ratings yet
- Me 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesDocument13 pagesMe 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesSenthil KumarNo ratings yet
- PWM Atmega328Document30 pagesPWM Atmega328JUNIOR700No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- The FET-OR Connection For Power Supplies: Backup Supply, Battery Operation, diode-OR, MOSFET, Power-Supply SequencingDocument3 pagesThe FET-OR Connection For Power Supplies: Backup Supply, Battery Operation, diode-OR, MOSFET, Power-Supply SequencingJonathan JaegerNo ratings yet
- Stabilizing Thermoelectric Controller (TEC) Loops Using A Unit-Step ResponseDocument4 pagesStabilizing Thermoelectric Controller (TEC) Loops Using A Unit-Step ResponseJonathan JaegerNo ratings yet
- 3A Internal Switch Step-Down Regulators Uses All Ceramic Capacitors For Small FootprintDocument3 pages3A Internal Switch Step-Down Regulators Uses All Ceramic Capacitors For Small FootprintJonathan JaegerNo ratings yet
- An3166 PDFDocument10 pagesAn3166 PDFJonathan JaegerNo ratings yet
- Basic Switching-Regulator-Layout Techniques: GroundDocument8 pagesBasic Switching-Regulator-Layout Techniques: GroundJonathan JaegerNo ratings yet
- Integrated DC-DC Converters Save Space and Design Time in Distributed-Power SystemsDocument4 pagesIntegrated DC-DC Converters Save Space and Design Time in Distributed-Power SystemsJonathan JaegerNo ratings yet
- An5 PDFDocument2 pagesAn5 PDFJonathan JaegerNo ratings yet
- DAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageDocument4 pagesDAC Makes Controller Programmable: Programmble Voltage, Programmable Controller, Dynamic Voltage, Core VoltageJonathan JaegerNo ratings yet
- Overcurrent/Overdischarge Protection For Lead-Acid BatteriesDocument3 pagesOvercurrent/Overdischarge Protection For Lead-Acid BatteriesJonathan JaegerNo ratings yet
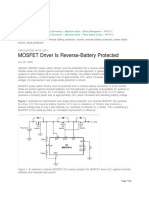
- MOSFET Driver Is Reverse-Battery ProtectedDocument2 pagesMOSFET Driver Is Reverse-Battery ProtectedJonathan JaegerNo ratings yet
- Simple Circuit Generates Multiple Isolated Supply VoltagesDocument2 pagesSimple Circuit Generates Multiple Isolated Supply VoltagesJonathan JaegerNo ratings yet
- DC-to-DC Converter Combats EMIDocument4 pagesDC-to-DC Converter Combats EMIJonathan JaegerNo ratings yet
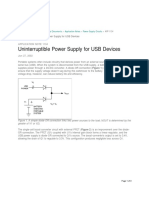
- Uninterruptible Power Supply For USB DevicesDocument3 pagesUninterruptible Power Supply For USB DevicesJonathan JaegerNo ratings yet
- Current-Limit Switch Is Digitally ProgrammableDocument2 pagesCurrent-Limit Switch Is Digitally ProgrammableJonathan JaegerNo ratings yet
- Case Study On Windows Vista HistoryDocument11 pagesCase Study On Windows Vista HistoryReshma JawaleNo ratings yet
- Manual SIWAREX WP521 WP522 en - PDF Page 102Document1 pageManual SIWAREX WP521 WP522 en - PDF Page 102Cristi CrseNo ratings yet
- MC Unit-3,4 QuestionsDocument3 pagesMC Unit-3,4 QuestionsPraneetha InumarthiNo ratings yet
- VSICM67 M03 VirtualMachines#32Document18 pagesVSICM67 M03 VirtualMachines#32velfortrabNo ratings yet
- Asus 1015p2 r1.0g SchematicsDocument43 pagesAsus 1015p2 r1.0g SchematicsajustNo ratings yet
- Kool ProgDocument18 pagesKool ProgSashko GjorgievskiNo ratings yet
- CS204-OS-module 3Document14 pagesCS204-OS-module 3Abitha SajanNo ratings yet
- Brocade NetApp Product Quick Reference Guide 201905Document8 pagesBrocade NetApp Product Quick Reference Guide 201905Alex JinNo ratings yet
- 00 Fr33thys Tweak GuideDocument1 page00 Fr33thys Tweak GuideAlfiar IkrarNo ratings yet
- Samsung LN60C630K1FXZA Fast Track Guide (SM)Document4 pagesSamsung LN60C630K1FXZA Fast Track Guide (SM)Carlos OdilonNo ratings yet
- DSS-2 Two-Channel Digital Speed Switch: User ManualDocument66 pagesDSS-2 Two-Channel Digital Speed Switch: User ManualJosko PrnjakNo ratings yet
- Brocade QRG NetApp 0320Document6 pagesBrocade QRG NetApp 0320ta cloudNo ratings yet
- AT-6 25e Texan ARF: Assembly ManualDocument52 pagesAT-6 25e Texan ARF: Assembly ManualAL PANTOJANo ratings yet
- Chapter 1 2Document23 pagesChapter 1 2huzefaNo ratings yet
- VF-S11 Built-In Board Option DEV001Z Function ManualDocument26 pagesVF-S11 Built-In Board Option DEV001Z Function Manualyohannes tsegayeNo ratings yet
- Arithmetic For Computers: Ngo Lam TrungDocument48 pagesArithmetic For Computers: Ngo Lam TrungEDX BKNo ratings yet
- CMDA Membership FormDocument6 pagesCMDA Membership FormChaitali DereNo ratings yet
- 9853 6482 20w Spare Parts Catalogue COP 1132Document65 pages9853 6482 20w Spare Parts Catalogue COP 1132armando rojo100% (1)
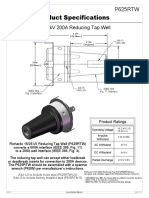
- Product Specifications: 15/25 KV 200A Reducing Tap WellDocument1 pageProduct Specifications: 15/25 KV 200A Reducing Tap WellJulio GongoraNo ratings yet
- PSIO Quick Start 25C18 R11Document2 pagesPSIO Quick Start 25C18 R11Pokinha junioNo ratings yet
- 3 Instruction ForthDocument6 pages3 Instruction Forthiret retiNo ratings yet
- Lecture 2 - Hardware DevicesDocument65 pagesLecture 2 - Hardware DevicesPatience KaringaNo ratings yet
- Legacy 800: Model 2026Document54 pagesLegacy 800: Model 2026abiel_guerraNo ratings yet
- Practical No 01 Gad 22034Document3 pagesPractical No 01 Gad 22034AB ESPORTSNo ratings yet
- Qualified Vendors List (QVL)Document4 pagesQualified Vendors List (QVL)Juan Ignacio SuarezNo ratings yet
- PWC Communication Tools and B.U.D.S. (Spark Series) - Shop Manual Supplement smr2016-108Document6 pagesPWC Communication Tools and B.U.D.S. (Spark Series) - Shop Manual Supplement smr2016-108Théo GousseyNo ratings yet
- O&k G10 BrakesDocument2 pagesO&k G10 BrakesEUROPARTSNo ratings yet
- Pipeline and Vector ProcessingDocument18 pagesPipeline and Vector ProcessingPavan Pulicherla100% (1)
- FUJITSU Server PRIMERGY RX2530 M5 Rack Server: Data SheetDocument15 pagesFUJITSU Server PRIMERGY RX2530 M5 Rack Server: Data SheetJoeBlack170283No ratings yet
- Installation Guide IWS-232DDocument112 pagesInstallation Guide IWS-232Ddavid del pradoNo ratings yet