You might also like
- Hardware in Multimedia (IP-OP Devices and Softwares)Document12 pagesHardware in Multimedia (IP-OP Devices and Softwares)SaurabhChaudharyNo ratings yet
- Hardware For Multimedia (Storage)Document16 pagesHardware For Multimedia (Storage)SaurabhChaudharyNo ratings yet
- Window FormsDocument11 pagesWindow FormsSaurabhChaudharyNo ratings yet
- Hardware For Multimedia: (Connections) 30-Aug-2016Document14 pagesHardware For Multimedia: (Connections) 30-Aug-2016SaurabhChaudharyNo ratings yet
- This Is SampleDocument1 pageThis Is SampleSaurabhChaudharyNo ratings yet
- OMC 403 - Assignment Section ADocument4 pagesOMC 403 - Assignment Section ASaurabhChaudharyNo ratings yet
- Internet and Java Programming (OMC 404) - Assignment BDocument4 pagesInternet and Java Programming (OMC 404) - Assignment BSaurabhChaudhary0% (1)
- Ch-02 (Relations and Functions) PDFDocument19 pagesCh-02 (Relations and Functions) PDFChinmaya Ranjan JenaNo ratings yet
- Math 124Document44 pagesMath 124ShailendraPatelNo ratings yet
- Solve The Following Questions With The Relevant Answer.: Case StudyDocument2 pagesSolve The Following Questions With The Relevant Answer.: Case StudySaurabhChaudhary33% (3)
- Computer Communication Network (OMC 403) - Assignment BDocument3 pagesComputer Communication Network (OMC 403) - Assignment BSaurabhChaudhary0% (6)
- Management Information System (OMC 401) - Assignment ADocument4 pagesManagement Information System (OMC 401) - Assignment ASaurabhChaudhary100% (1)
- StatisticsDocument36 pagesStatisticsVaibhav SinghNo ratings yet
- StatisticsDocument36 pagesStatisticsVaibhav SinghNo ratings yet
- Textual Learning Material - Module 1Document44 pagesTextual Learning Material - Module 1SaurabhChaudharyNo ratings yet
- Class XI Chapter On Binomial TheoremDocument17 pagesClass XI Chapter On Binomial TheoremkapsicumNo ratings yet
- This Is SampleDocument1 pageThis Is SampleSaurabhChaudharyNo ratings yet
- Written by SaurabhDocument1 pageWritten by SaurabhSaurabhChaudharyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Enhancing Image Compression Process Using Thresholding Haar Transform For X-Ray ImagingDocument6 pagesEnhancing Image Compression Process Using Thresholding Haar Transform For X-Ray ImagingInternational Journal of Application or Innovation in Engineering & Management100% (1)
- Handout Digital Image ProcessingDocument2 pagesHandout Digital Image ProcessingSuhas GhantaNo ratings yet
- Catalog - Arroway Textures - Stone Volume One (EN) PDFDocument19 pagesCatalog - Arroway Textures - Stone Volume One (EN) PDFKopopo90No ratings yet
- 2D Viewing: CGVR - Korea.ac - KRDocument61 pages2D Viewing: CGVR - Korea.ac - KRSangeetha BajanthriNo ratings yet
- Gray Scale MorphologyDocument14 pagesGray Scale MorphologyMithun kumarNo ratings yet
- Analysis of Image Quality Using Sobel FilterDocument6 pagesAnalysis of Image Quality Using Sobel Filtersinchana G SNo ratings yet
- Intro To PhotoshopDocument21 pagesIntro To PhotoshopSamantha Rulla100% (1)
- EE 604 Image ProcessingDocument15 pagesEE 604 Image Processingmuskan agarwalNo ratings yet
- Semester Project ThesisDocument5 pagesSemester Project ThesisUsama FaizNo ratings yet
- HP DesignJet 800 HeavyCoatedDocument53 pagesHP DesignJet 800 HeavyCoatedMuhammet AlabeyNo ratings yet
- Edgeconnect: Generative Image Inpainting With Adversarial Edge LearningDocument17 pagesEdgeconnect: Generative Image Inpainting With Adversarial Edge LearningRaghavendra ShettyNo ratings yet
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDocument5 pagesDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretNo ratings yet
- 5.windowing and ClipingDocument102 pages5.windowing and ClipingYashovardhan BangurNo ratings yet
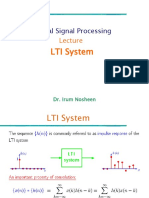
- LTI System: Digital Signal ProcessingDocument40 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- Step 1: Final Product What You'll Be CreatingDocument28 pagesStep 1: Final Product What You'll Be CreatingDuWayne HolidayNo ratings yet
- 47 Vol 6 No 2Document5 pages47 Vol 6 No 2ganeshNo ratings yet
- Chapter 5: Advanced Picture TechniquesDocument85 pagesChapter 5: Advanced Picture TechniquesSadi SnmzNo ratings yet
- Local Energy-Based Multimodal Medical Image Fusion in Curvelet DomainDocument15 pagesLocal Energy-Based Multimodal Medical Image Fusion in Curvelet DomainHemanth JNo ratings yet
- CodeDocument37 pagesCoderobinNo ratings yet
- VersionDocument81 pagesVersionArif UwongNo ratings yet
- Empannelled Hospital of NrlyDocument16 pagesEmpannelled Hospital of NrlySiddhant TyagiNo ratings yet
- Mixed RealityDocument14 pagesMixed Realityatom tuxNo ratings yet
- Image ResolutionDocument2 pagesImage Resolutionadhi eng lrtNo ratings yet
- Photo Processing With Cs1media - CS101 Introduction To ProgrammingDocument7 pagesPhoto Processing With Cs1media - CS101 Introduction To Programmingwalaba06100% (1)
- Lecture 12Document39 pagesLecture 12Meme LoversNo ratings yet
- CGR Unit4Document37 pagesCGR Unit4kuldeepsuryawanshi7020No ratings yet
- Reflection ScratchesDocument28 pagesReflection ScratchesAna MartinezNo ratings yet
- Bitmap v. VectorDocument4 pagesBitmap v. VectorPrintNinja100% (1)
- CG AssignmentDocument5 pagesCG Assignmentmaster9_2_11No ratings yet
- TM-30 ES (Final) - 0Document43 pagesTM-30 ES (Final) - 0Alexander MarkhonkoNo ratings yet