You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- STM Ec2Document39 pagesSTM Ec2Vincenzo MondelliNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
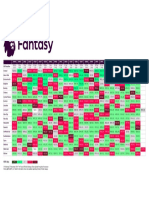
- FDR 2019 20 - V16Document1 pageFDR 2019 20 - V16AshutoshAparajNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Practical Look at Creep and Shrinkage in Bridge DesignDocument14 pagesA Practical Look at Creep and Shrinkage in Bridge DesignAshutoshAparajNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- NIESR Election Briefing - The Macroeconomics of Parties' Tax and Spending PlansDocument8 pagesNIESR Election Briefing - The Macroeconomics of Parties' Tax and Spending PlansAshutoshAparajNo ratings yet
- NIESR Election Briefing - The Fiscal RulesDocument6 pagesNIESR Election Briefing - The Fiscal RulesAshutoshAparajNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Civil Applications PDFDocument23 pagesCivil Applications PDFJEMAYERNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Designer's Guide To EN 1997-1 Eurocode 7: Geotechnical Design - General RulesDocument15 pagesDesigner's Guide To EN 1997-1 Eurocode 7: Geotechnical Design - General RulesAshutoshAparajNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- That's The Way We MetDocument105 pagesThat's The Way We MetDineshChandrashekar100% (8)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Reinforcement Design Using Linear AnalysisDocument22 pagesReinforcement Design Using Linear AnalysisAshutoshAparajNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- MaterialDocument161 pagesMaterialAshutoshAparajNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Thick Shell Element Stress TypesDocument1 pageThick Shell Element Stress TypesAshutoshAparajNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- RCS Theory Part 2Document23 pagesRCS Theory Part 2AshutoshAparajNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Staad Pro Moving LoadsDocument10 pagesStaad Pro Moving LoadsV.m. RajanNo ratings yet
- An Introduction To The Network ArchDocument29 pagesAn Introduction To The Network ArchSzabolcs Attila KöllőNo ratings yet
- ARIJIT GUHA Road Development in India August2016Document42 pagesARIJIT GUHA Road Development in India August2016Goutam ChakrabortyNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Aqua 1Document329 pagesAqua 1AshutoshAparajNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- TeseDocument172 pagesTeseAshutoshAparajNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Slab Design by Wood Armer MethodDocument2 pagesSlab Design by Wood Armer MethodUmesh Patil75% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Wood - ArmerDocument6 pagesWood - ArmerNovak Novaković100% (1)
- Strut & Tie ModelDocument67 pagesStrut & Tie Modelahmed adel100% (9)
- S Hawkins ThesisDocument134 pagesS Hawkins ThesisAndrew Richard ThompsonNo ratings yet
- Solver Reference Manual PDFDocument458 pagesSolver Reference Manual PDFanon_724089825No ratings yet
- LUSAS Volume 2Document272 pagesLUSAS Volume 2AshutoshAparaj100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Elementos Finitos FEM - Finite Element Procedures - K.-J. Bathe - 1996Document1,052 pagesElementos Finitos FEM - Finite Element Procedures - K.-J. Bathe - 1996Eugenio Ferreras100% (1)
- Advanced Structural Mechanics PDFDocument312 pagesAdvanced Structural Mechanics PDFFelipe Carrasco DuránNo ratings yet
- Arranged Love by Parul A Mittal in PDFDocument162 pagesArranged Love by Parul A Mittal in PDFAshutoshAparajNo ratings yet
- sp74 2007Document36 pagessp74 2007AshutoshAparajNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Ise Authentication Step PDFDocument6 pagesIse Authentication Step PDFSachin SilmanaNo ratings yet
- NS10 1concrete PDFDocument17 pagesNS10 1concrete PDFBoreirNo ratings yet
- DIK 18A Intan Suhariani 218112100 CJR Research MethodologyDocument9 pagesDIK 18A Intan Suhariani 218112100 CJR Research MethodologyFadli RafiNo ratings yet
- Liquefaction of Soil in KathmanduDocument9 pagesLiquefaction of Soil in Kathmanduajay shresthaNo ratings yet
- Towards Innovative Community Building: DLSU Holds Henry Sy, Sr. Hall GroundbreakingDocument2 pagesTowards Innovative Community Building: DLSU Holds Henry Sy, Sr. Hall GroundbreakingCarl ChiangNo ratings yet
- POLE FOUNDATION ANALYSIS EXCEL TOOLDocument18 pagesPOLE FOUNDATION ANALYSIS EXCEL TOOLJosue HasbunNo ratings yet
- Phy 111 - Eos Exam 2015Document7 pagesPhy 111 - Eos Exam 2015caphus mazengeraNo ratings yet
- Digital Banking in Vietnam: A Guide To MarketDocument20 pagesDigital Banking in Vietnam: A Guide To MarketTrang PhamNo ratings yet
- Spray Up MoldingDocument2 pagesSpray Up MoldingneelagaantanNo ratings yet
- Sketch 5351a Lo LCD Key Uno 1107Document14 pagesSketch 5351a Lo LCD Key Uno 1107nobcha aNo ratings yet
- Optimizing Blended Learning with Synchronous and Asynchronous TechnologiesDocument24 pagesOptimizing Blended Learning with Synchronous and Asynchronous TechnologiesAnonymous GOUaH7FNo ratings yet
- Our Products: Powercore Grain Oriented Electrical SteelDocument20 pagesOur Products: Powercore Grain Oriented Electrical SteelkoalaboiNo ratings yet
- ICT - 81 - F32A - ISO - 13485 - and - MDD - IVDD - Checklist - Rev1 - 01.05.2020 - ALAMIN (1) (Recovered)Document41 pagesICT - 81 - F32A - ISO - 13485 - and - MDD - IVDD - Checklist - Rev1 - 01.05.2020 - ALAMIN (1) (Recovered)Basma ashrafNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Registration Confirmation: 315VC18331 Aug 24 2009 7:47PM Devashish Chourasiya 24/05/1989 Mechanical RanchiDocument2 pagesRegistration Confirmation: 315VC18331 Aug 24 2009 7:47PM Devashish Chourasiya 24/05/1989 Mechanical Ranchicalculatorfc101No ratings yet
- Schmitt Trigger FinalDocument4 pagesSchmitt Trigger Finalsidd14feb92No ratings yet
- Lecture 8: Dynamics Characteristics of SCR: Dr. Aadesh Kumar AryaDocument9 pagesLecture 8: Dynamics Characteristics of SCR: Dr. Aadesh Kumar Aryaaadesh kumar aryaNo ratings yet
- Using Sunspots To Measure Solar Rotation: Astronomy 104 Observing Laboratory Spring 2009Document6 pagesUsing Sunspots To Measure Solar Rotation: Astronomy 104 Observing Laboratory Spring 2009Jeko Betguen PalangiNo ratings yet
- Dream Drills for High Hardened SteelDocument8 pagesDream Drills for High Hardened SteelPuneeth KumarNo ratings yet
- ATC Flight PlanDocument21 pagesATC Flight PlanKabanosNo ratings yet
- Teach Empathy With LiteratureDocument3 pagesTeach Empathy With LiteratureSantiago Cardenas DiazNo ratings yet
- Unit 3 Digital Documentation: Multiple Choice QuestionsDocument7 pagesUnit 3 Digital Documentation: Multiple Choice Questions07tp27652% (21)
- 11 - Leo Vega Bolt Failure AnalysisDocument35 pages11 - Leo Vega Bolt Failure AnalysissymkimonNo ratings yet
- Rizal's Works Inspire Filipino PrideDocument2 pagesRizal's Works Inspire Filipino PrideItzLian SanchezNo ratings yet
- Investigação de Um Novo Circuito de Balanceamento de Tensão para Turbinas Eólicas Baseadas em PMSG Offshore Conectadas em ParaleloDocument7 pagesInvestigação de Um Novo Circuito de Balanceamento de Tensão para Turbinas Eólicas Baseadas em PMSG Offshore Conectadas em ParaleloDaniel reisNo ratings yet
- GCSE Combined Science PDFDocument198 pagesGCSE Combined Science PDFMpumelelo Langalethu MoyoNo ratings yet
- Solid Solution For Catalytic Ammonia Synthesis FromDocument8 pagesSolid Solution For Catalytic Ammonia Synthesis FromAhmad AlShahrourNo ratings yet
- Quick Start Guide - QualiPoc AndroidDocument24 pagesQuick Start Guide - QualiPoc AndroidDmitekNo ratings yet
- Stat and Prob Q1 M3Document15 pagesStat and Prob Q1 M3Samantha Kyle E. PedrigozaNo ratings yet
- Oil & Gas Rig Roles Functions ProcessesDocument5 pagesOil & Gas Rig Roles Functions ProcessesAnant Ramdial100% (1)
- Kathryn Stanley ResumeDocument2 pagesKathryn Stanley Resumeapi-503476564No ratings yet
- Narrative Report On Catch Up Friday ReadingDocument2 pagesNarrative Report On Catch Up Friday ReadingNova Mae AgraviadorNo ratings yet
- CBSE KV Class VIII SA I Maths Sample Question Paper 2015Document3 pagesCBSE KV Class VIII SA I Maths Sample Question Paper 2015Amrita SenNo ratings yet