You might also like
- Hydraulic ValvesDocument19 pagesHydraulic ValvesRahul SinghNo ratings yet
- 10 Mind-Blowing Theories About The Universe and Reality - ListverseDocument19 pages10 Mind-Blowing Theories About The Universe and Reality - ListverseSayanSanyalNo ratings yet
- Design 2 ReboilerDocument5 pagesDesign 2 ReboilerAbdulrazzaqAL-MalikyNo ratings yet
- WELDABILITY of SteelDocument41 pagesWELDABILITY of Steel0502ravi100% (1)
- MO-40 Re64370 2015-01Document12 pagesMO-40 Re64370 2015-01omar farukNo ratings yet
- MHV Proportional Directional Control Valve Series MHV... K: FeaturesDocument28 pagesMHV Proportional Directional Control Valve Series MHV... K: FeaturesthijssilderhuisNo ratings yet
- 02 Hydraulic Cartridges-Counterbalance Valves Ir2Document17 pages02 Hydraulic Cartridges-Counterbalance Valves Ir2zliangNo ratings yet
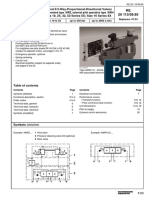
- REXROTH 4wrz 16 5x-6x Series PDFDocument20 pagesREXROTH 4wrz 16 5x-6x Series PDFمحمدلمينابراهيمالموريتاني100% (1)
- New Bolting For PdmsDocument23 pagesNew Bolting For Pdmsnormuch50% (2)
- b25d b30d Mkiii HydraulicsDocument28 pagesb25d b30d Mkiii HydraulicsErmias100% (3)
- International Physics Olympiad IPhO 1967 2019Document1,575 pagesInternational Physics Olympiad IPhO 1967 2019SanikNo ratings yet
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- CH 5-Hydraulic Circuit Design and AnalysisDocument39 pagesCH 5-Hydraulic Circuit Design and AnalysisSami Onur VuralNo ratings yet
- Hydraulic Circuits Tutorial PDFDocument40 pagesHydraulic Circuits Tutorial PDFShaheen S. Ratnani69% (13)
- Gujarat Boiler Examination Board Boiler Operation Engineer Exam-2017Document10 pagesGujarat Boiler Examination Board Boiler Operation Engineer Exam-2017Alok DoshiNo ratings yet
- Amca Mev A e 06 07 PDFDocument32 pagesAmca Mev A e 06 07 PDFthijssilderhuisNo ratings yet
- HydraulicDocument60 pagesHydraulicAswinNo ratings yet
- Working Guide to Reservoir Rock Properties and Fluid FlowFrom EverandWorking Guide to Reservoir Rock Properties and Fluid FlowRating: 3 out of 5 stars3/5 (1)
- Compressor FoundationDocument4 pagesCompressor FoundationnvnagarajuNo ratings yet
- Mec291 Manual Lab Edited Mac 2019Document54 pagesMec291 Manual Lab Edited Mac 2019Ammar ArfanNo ratings yet
- Hydraulic Module: Instructors: MAJID Hendra FahrurrozyDocument15 pagesHydraulic Module: Instructors: MAJID Hendra FahrurrozyDwiki Yudia BasukiNo ratings yet
- Data Sheet: Directional Control Valves - Size 10Document4 pagesData Sheet: Directional Control Valves - Size 10Patricio Maldonado AlvarezNo ratings yet
- Electrical Power Systems Wadhwa 11Document1 pageElectrical Power Systems Wadhwa 11teceeeNo ratings yet
- CapgeminiDocument21 pagesCapgeminiDinesh KumarNo ratings yet
- L5 - ValvesDocument26 pagesL5 - Valvesu1909030No ratings yet
- Compressors: Dr.K.V.N. Srinivasa RaoDocument62 pagesCompressors: Dr.K.V.N. Srinivasa RaoLalith SunkojuNo ratings yet
- Pressure Surges - Experimental Investigations and Calculations With Software CodesDocument11 pagesPressure Surges - Experimental Investigations and Calculations With Software CodesFabio FolpiniNo ratings yet
- Dyn ModelingDocument10 pagesDyn ModelingSagar KumarNo ratings yet
- Module 3Document30 pagesModule 3Sk.Abdul NaveedNo ratings yet
- Industrial Hydraulic CircuitsDocument16 pagesIndustrial Hydraulic CircuitsSanthanam GaneshNo ratings yet
- Control Components in Hydraulic SystemDocument27 pagesControl Components in Hydraulic Systemyuvaraja sNo ratings yet
- FAQ-Lecture 24 To 26Document11 pagesFAQ-Lecture 24 To 26sandeepNo ratings yet
- Variable Displacement Control of The Concrete Pumping System Based On Dynamic ProgrammingDocument6 pagesVariable Displacement Control of The Concrete Pumping System Based On Dynamic ProgrammingKumardasNsNo ratings yet
- Kaltfrase - BM - 1000 - 1200 - 1300 - 30 - 2 - & - 2 - PB - BK HidraulicoDocument249 pagesKaltfrase - BM - 1000 - 1200 - 1300 - 30 - 2 - & - 2 - PB - BK Hidraulicosebastian blancoNo ratings yet
- Research On Characteristics and Key Design Parameters of A Pilot-Assisted Load Control ValveDocument9 pagesResearch On Characteristics and Key Design Parameters of A Pilot-Assisted Load Control ValveshashibagewadiNo ratings yet
- CHE 253M Experiment No. 3 Liquid Flow MeasurementDocument12 pagesCHE 253M Experiment No. 3 Liquid Flow MeasurementAdellNo ratings yet
- Worksheet - Pressure Losses and Pump Performance WorksheetDocument10 pagesWorksheet - Pressure Losses and Pump Performance WorksheetUmair AnwarNo ratings yet
- Lecture 17Document16 pagesLecture 17NEELIMANo ratings yet
- Fire Sprinkler Chap4Document3 pagesFire Sprinkler Chap4EvriMert RüzgArdaNo ratings yet
- EXPERIMENT 3dDocument7 pagesEXPERIMENT 3dMạch Vũ Anh KhoaNo ratings yet
- MEC-E5003 Fluid Power Basics Calculation Exercises 3 Spring 2017Document2 pagesMEC-E5003 Fluid Power Basics Calculation Exercises 3 Spring 2017أبو أسامة حمديNo ratings yet
- Lecture 13Document36 pagesLecture 13salem bahsanNo ratings yet
- Flow Control ValvesDocument10 pagesFlow Control ValvesAhmed ElgamlNo ratings yet
- Hydraulic Circuit Design and Analysis (Continued) : 1.14 Circuit For Fast Approach and Slow Die ClosingDocument20 pagesHydraulic Circuit Design and Analysis (Continued) : 1.14 Circuit For Fast Approach and Slow Die ClosingRibal KhreisNo ratings yet
- Design and Fabrication of A Glass CrusherDocument23 pagesDesign and Fabrication of A Glass CrusherBtech MechNo ratings yet
- Actuators: Version 2 EE IIT, Kharagpur 1Document29 pagesActuators: Version 2 EE IIT, Kharagpur 1Khaled MahranNo ratings yet
- Control ValvesDocument11 pagesControl Valvespranjal priyeNo ratings yet
- Actuators: Version 2 EE IIT, Kharagpur 1Document29 pagesActuators: Version 2 EE IIT, Kharagpur 1Khaled MahranNo ratings yet
- Chapter 3Document31 pagesChapter 3tekitech443No ratings yet
- 1.1.1 Functions of Flow-Control ValvesDocument24 pages1.1.1 Functions of Flow-Control Valvesatashi baran mohantyNo ratings yet
- Valve Hyva PTDocument2 pagesValve Hyva PTAnangtri WahyudiNo ratings yet
- L3 Control ValvesDocument36 pagesL3 Control Valvesgebremicael legesseNo ratings yet
- Experiment 3Document5 pagesExperiment 3Edyazuan ChannelNo ratings yet
- UNIT 3 (G) IhpDocument51 pagesUNIT 3 (G) Ihpsantosh alguleNo ratings yet
- UREZ6 XDocument10 pagesUREZ6 Xhai dangNo ratings yet
- 1 Basic Hyd CircuitDocument44 pages1 Basic Hyd CircuithamidouNo ratings yet
- 4/3, 4/2 and 3/2 Directional Valve With Wet-Pin AC or DC SolenoidDocument10 pages4/3, 4/2 and 3/2 Directional Valve With Wet-Pin AC or DC SolenoidMahmoued LotfyNo ratings yet
- 1.1 Electrohydraulic Control System OverviewDocument14 pages1.1 Electrohydraulic Control System OverviewSaujatya MandalNo ratings yet
- Conveyor Tensioning Device: TP501 Festo DidacticDocument9 pagesConveyor Tensioning Device: TP501 Festo DidacticGiang TônNo ratings yet
- NewGenerationRadialPistonPumps TechpaperDocument12 pagesNewGenerationRadialPistonPumps TechpaperEbrahim AhmariNo ratings yet
- LUDV Control Block in Mono Block/sandwich Plate Design M7-20Document16 pagesLUDV Control Block in Mono Block/sandwich Plate Design M7-20rodrigomessiasNo ratings yet
- Hydraulic 2Document15 pagesHydraulic 2Lonardo WajihNo ratings yet
- DIRECTIONAL CONTROL VALVES Part-A Question and AnswersDocument5 pagesDIRECTIONAL CONTROL VALVES Part-A Question and Answerssar_tpgitNo ratings yet
- Reciprocating PumpsDocument16 pagesReciprocating PumpsMahmoud AfifyNo ratings yet
- 1 - en - EEM - O2.4 - Expert 4 - TP Water PumpDocument5 pages1 - en - EEM - O2.4 - Expert 4 - TP Water PumpAnthonyNo ratings yet
- Homework 04 SolutionDocument8 pagesHomework 04 SolutionEge GökayNo ratings yet
- Example: Calculating Frequencies Mode Shapes For A MDOF StructureDocument3 pagesExample: Calculating Frequencies Mode Shapes For A MDOF StructureSayanSanyalNo ratings yet
- E-Cards ManualDocument7 pagesE-Cards ManualSayanSanyalNo ratings yet
- Aveva - Wikipedia8Document1 pageAveva - Wikipedia8SayanSanyalNo ratings yet
- Aveva - Wikipedia12Document1 pageAveva - Wikipedia12SayanSanyalNo ratings yet
- Aveva - Wikipedia10Document1 pageAveva - Wikipedia10SayanSanyalNo ratings yet
- or Read: Arundel PDF EbookDocument8 pagesor Read: Arundel PDF EbookSayanSanyalNo ratings yet
- Angle Measurement: Instruments Used For Angular MeasurementDocument8 pagesAngle Measurement: Instruments Used For Angular MeasurementSayanSanyalNo ratings yet
- Aveva - Wikipedia6Document1 pageAveva - Wikipedia6SayanSanyalNo ratings yet
- Today's Featured Picture: Jeannette Rankin Became The FirstDocument1 pageToday's Featured Picture: Jeannette Rankin Became The FirstSayanSanyalNo ratings yet
- Aveva - Wikipedia2Document1 pageAveva - Wikipedia2SayanSanyalNo ratings yet
- Storage Tank RadiographyDocument2 pagesStorage Tank RadiographySayanSanyalNo ratings yet
- Flight Ticket - Kolkata To Visakhapatnam: Fare Rules & BaggageDocument2 pagesFlight Ticket - Kolkata To Visakhapatnam: Fare Rules & BaggageSayanSanyalNo ratings yet
- Aveva - Wikipedia1Document1 pageAveva - Wikipedia1SayanSanyalNo ratings yet
- New Email Id Creation Request: P.S No First Name Middle Name Last Name Cadre MFFK059 Manoj Aiyappan ConsultantDocument3 pagesNew Email Id Creation Request: P.S No First Name Middle Name Last Name Cadre MFFK059 Manoj Aiyappan ConsultantSayanSanyalNo ratings yet
- Mechanical Engineering Department Application Form For Allotment of Elective - Ii& IiiDocument2 pagesMechanical Engineering Department Application Form For Allotment of Elective - Ii& IiiSayanSanyalNo ratings yet
- Swage Nipples BS3799 Specification METLINEDocument1 pageSwage Nipples BS3799 Specification METLINESayanSanyalNo ratings yet
- List of Elective Papers and Advanced Design Projects: TH STDocument4 pagesList of Elective Papers and Advanced Design Projects: TH STSayanSanyalNo ratings yet
- Determination of Rockfill Shear Parameters For Dam Stability Analysis of An Embankment DamDocument9 pagesDetermination of Rockfill Shear Parameters For Dam Stability Analysis of An Embankment Damsharvan10No ratings yet
- Corrosion Inhibition at Scribed Locations in Coated AA2024-T3 by Cerium - and DMTD-Loaded Natural Silica Microparticles Under Continuous Immersion and Wet-Dry Cyclic ExposureDocument15 pagesCorrosion Inhibition at Scribed Locations in Coated AA2024-T3 by Cerium - and DMTD-Loaded Natural Silica Microparticles Under Continuous Immersion and Wet-Dry Cyclic ExposureHa Linh VuNo ratings yet
- Vortex - Wikipedia, The Free EncyclopediaDocument8 pagesVortex - Wikipedia, The Free EncyclopediaSheikh Zakir100% (1)
- Newton's Second Law of Motion: Force and AccelerationDocument21 pagesNewton's Second Law of Motion: Force and AccelerationKasey MatthewsNo ratings yet
- Leonards e Loveel-Interpretation of Load Tests On High-Capacity Driven PilesDocument28 pagesLeonards e Loveel-Interpretation of Load Tests On High-Capacity Driven PilesElisângela AlmeidaNo ratings yet
- Physics Perfect Score Module Form 5Document48 pagesPhysics Perfect Score Module Form 5jemwesleyNo ratings yet
- Abbattitore Di Temperatura Mod. BF-P101 - UKDocument3 pagesAbbattitore Di Temperatura Mod. BF-P101 - UKConrado TangariNo ratings yet
- Water Rechiller / Heat ExchangerDocument2 pagesWater Rechiller / Heat ExchangerpedroNo ratings yet
- Review: Nonideal Flow in A CSTRDocument49 pagesReview: Nonideal Flow in A CSTRFebrianti FitrianiNo ratings yet
- Brazing Filler Metal Selector Chart: NicrobrazDocument2 pagesBrazing Filler Metal Selector Chart: NicrobrazathulpcucekNo ratings yet
- P9736 (1) (1) 000000000000000000000000Document29 pagesP9736 (1) (1) 000000000000000000000000WASEM ANWARNo ratings yet
- Question Bank of Kinematics of MachinesDocument3 pagesQuestion Bank of Kinematics of MachinesnikhilNo ratings yet
- Metalcor 2.4375 Alloy K500Document1 pageMetalcor 2.4375 Alloy K500Gourav SharmaNo ratings yet
- Bisley-Phosphonate-Dispersant-Plasticizer-TDS (1) پخش کننده و روان کننده فسفونات بیسلیDocument2 pagesBisley-Phosphonate-Dispersant-Plasticizer-TDS (1) پخش کننده و روان کننده فسفونات بیسلیrezaNo ratings yet
- Design of Shape Memory Alloy Actuators For MorphinDocument10 pagesDesign of Shape Memory Alloy Actuators For MorphinRe DesignNo ratings yet
- Chevron GST 2300Document2 pagesChevron GST 2300Asuh Rifqi PrihandanaNo ratings yet
- Solid Oxide Fuel Cell Modeling: IEEE Transactions On Industrial Electronics January 2009Document11 pagesSolid Oxide Fuel Cell Modeling: IEEE Transactions On Industrial Electronics January 2009Peter VallejoNo ratings yet
- Effect of Temperature On Creep in Astm A572 High-Strength PDFDocument9 pagesEffect of Temperature On Creep in Astm A572 High-Strength PDFpathysabaNo ratings yet
- ETME205TS2Document1 pageETME205TS2Dishant KumarNo ratings yet
- Solid-Liquid ExtractionDocument3 pagesSolid-Liquid ExtractionRonaldo CastroNo ratings yet
- (Mineralogy) ColourDocument48 pages(Mineralogy) ColourSivaKumarNo ratings yet
- Vdocuments Structural Analysis Chapter 12 Edition 8thDocument38 pagesVdocuments Structural Analysis Chapter 12 Edition 8thIan Christian SangalangNo ratings yet
- Fibermesh BrochureDocument6 pagesFibermesh BrochureAndrik SugiartoNo ratings yet
- Promotion Price in December 1-30,2020. HFMEDDocument6 pagesPromotion Price in December 1-30,2020. HFMEDMD SUMON ALI0% (1)