You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Wave EquationDocument8 pagesWave EquationaminNo ratings yet
- Datasheet Kanthal A 1Document2 pagesDatasheet Kanthal A 1Claudio ZalazarNo ratings yet
- 04-NSF Design and EC7 (Prof Harry Tan)Document66 pages04-NSF Design and EC7 (Prof Harry Tan)thusiyanthanp100% (2)
- Secondary 2 Science NotesDocument43 pagesSecondary 2 Science Noteszach0% (1)
- Class Notes On Underground Excavations in Rock: (Last Revision - June 06) (UE-T9-1) (UE-T9-2)Document31 pagesClass Notes On Underground Excavations in Rock: (Last Revision - June 06) (UE-T9-1) (UE-T9-2)sarvannn100% (1)
- Gamma Ray PDFDocument15 pagesGamma Ray PDFfermeskopNo ratings yet
- Introduction To PhysicsDocument4 pagesIntroduction To PhysicsJoseph TingNo ratings yet
- MSC Physics Semester IV, VNSGUDocument19 pagesMSC Physics Semester IV, VNSGUTushar Tk VaghasiyaNo ratings yet
- Goodbye, Hazen Hello, Kozeny-CarmanDocument3 pagesGoodbye, Hazen Hello, Kozeny-CarmanOscarNo ratings yet
- Isomerism DPPDocument20 pagesIsomerism DPPAryhaNo ratings yet
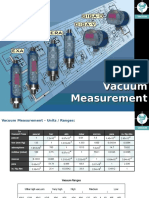
- VacuumDocument18 pagesVacuumHyma Prasad GelliNo ratings yet
- Static Electricity ConductionDocument21 pagesStatic Electricity ConductionMirza ImanNo ratings yet
- ENGINEERING MECHANICS Module 1Document34 pagesENGINEERING MECHANICS Module 1rout79858No ratings yet
- 2D Boss AIDocument4 pages2D Boss AIJosef McGrathNo ratings yet
- Coherent Generation of 100 GHZ Acoustic Phonons by Dynamic Screening ofDocument4 pagesCoherent Generation of 100 GHZ Acoustic Phonons by Dynamic Screening ofSANTHAKUMAR SNo ratings yet
- Spur GearDocument1 pageSpur GearAngielou SialanaNo ratings yet
- Divergence TheoremDocument6 pagesDivergence TheoremAdithyaNo ratings yet
- Conservation of Momentum MCQ TestDocument7 pagesConservation of Momentum MCQ Testmann123No ratings yet
- Karnataka 2nd PUC Mathematics Question Paper 2022Document18 pagesKarnataka 2nd PUC Mathematics Question Paper 2022Bharath SNo ratings yet
- Cmat Books3Document73 pagesCmat Books3EspoirVungingaByawendeNo ratings yet
- MATH 4A - Linear Algebra With Applications: Lecture 21: Characteristic Polynomial, and DiagonalizationDocument46 pagesMATH 4A - Linear Algebra With Applications: Lecture 21: Characteristic Polynomial, and DiagonalizationakshayNo ratings yet
- Neraca Massa Dan EnergiDocument53 pagesNeraca Massa Dan EnergiAstrid HerawatiNo ratings yet
- Science 9th ClassDocument1 pageScience 9th ClasskuldeepNo ratings yet
- MC 909Document182 pagesMC 909JonathanPobletePerezNo ratings yet
- Goodson Magnaflux Y7 ManualDocument2 pagesGoodson Magnaflux Y7 ManualmgmqroNo ratings yet
- Defects Nonstoichiometry Ionic Conductivity Solid StateDocument61 pagesDefects Nonstoichiometry Ionic Conductivity Solid StateAgarwal Rachit100% (2)
- Lldpe: Linear Low Density PolyethyleneDocument5 pagesLldpe: Linear Low Density Polyethyleneธีรสิทธิ์ กุศลส่งทวีNo ratings yet
- Flakiness Lab Manual CalculationDocument3 pagesFlakiness Lab Manual CalculationJaikishan KumaraswamyNo ratings yet
- All Emft NotesDocument89 pagesAll Emft Notestony kimaniNo ratings yet
- Admin 22864 CH 19 Nuclear ChemistryDocument16 pagesAdmin 22864 CH 19 Nuclear ChemistryAbdi mohammedNo ratings yet