You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ProblemsDocument2 pagesProblemsRitesh SharmaNo ratings yet
- Insurance Premium Option: Calculation SheetDocument44 pagesInsurance Premium Option: Calculation SheetroyalvirenNo ratings yet
- Myth-II-Soulblighter Manual Win enDocument81 pagesMyth-II-Soulblighter Manual Win enlupyen youngNo ratings yet
- Apple Iphone & Accessories PDFDocument1 pageApple Iphone & Accessories PDFEslam A. AliNo ratings yet
- Ieee Base CT PT Sizing For Substation Excel Sheet - Google SearchDocument2 pagesIeee Base CT PT Sizing For Substation Excel Sheet - Google SearchUjjal ChakmaNo ratings yet
- Summer Training Form in BSNLDocument3 pagesSummer Training Form in BSNLRajat Yadav Yaduvanshi100% (2)
- DatasheetDocument80 pagesDatasheetselocaNo ratings yet
- Surface Vehicle InformationDocument7 pagesSurface Vehicle InformationanupthattaNo ratings yet
- Cedes: GLS 126 NT and GLS 151 NTDocument2 pagesCedes: GLS 126 NT and GLS 151 NTLoloy NorybNo ratings yet
- CP4014 0 1Document3 pagesCP4014 0 1Jou PowerNo ratings yet
- Mit Lab 01Document6 pagesMit Lab 01api-247714257No ratings yet
- Pengenalan Kepada AutocadDocument28 pagesPengenalan Kepada AutocadHanapi Ahamd AwatNo ratings yet
- M28 BluetoothModulesDocument5 pagesM28 BluetoothModulessouwestrubiNo ratings yet
- Distribution Safety InstructionDocument12 pagesDistribution Safety InstructionShakeb RahmanNo ratings yet
- 171001Document2 pages171001vishalsanziraNo ratings yet
- The History and Development of RadioDocument15 pagesThe History and Development of RadiowillNo ratings yet
- Report ProjectDocument17 pagesReport ProjectMAGUDESWARAN PNo ratings yet
- Transimpedance Amplifier With Mic PDFDocument23 pagesTransimpedance Amplifier With Mic PDFChanderKishoreJoshiNo ratings yet
- Abb Ag: RTU560 / RTU211Document2 pagesAbb Ag: RTU560 / RTU211Cosmic Garash 2No ratings yet
- Procedimiento Tecnico KUNDocument23 pagesProcedimiento Tecnico KUNDani GambettaNo ratings yet
- Robox User Manual RBX 1Document120 pagesRobox User Manual RBX 1JoezifNo ratings yet
- Final Day PresentationDocument43 pagesFinal Day Presentationswanichatterjee0No ratings yet
- 6EP14362BA10 Datasheet enDocument4 pages6EP14362BA10 Datasheet enTio SNo ratings yet
- Hill Hold ControlDocument4 pagesHill Hold ControlacairalexNo ratings yet
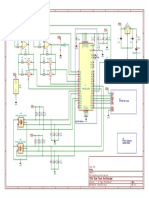
- Title: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenDocument1 pageTitle: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenAbdelkader Mechernene100% (2)
- Design and Construct A 3 KVA Micro Controller Based Pure Sine Wave Inverter With Controlled OutputDocument70 pagesDesign and Construct A 3 KVA Micro Controller Based Pure Sine Wave Inverter With Controlled OutputMcCurtis Akpojaro100% (1)
- Resume 1 Page RamDocument1 pageResume 1 Page RamRamnarayan ShreyasNo ratings yet
- Relay Settings For MotorsDocument8 pagesRelay Settings For MotorsArvind KumawatNo ratings yet
- FC700A HardwareDocument36 pagesFC700A HardwaremohammedrezaeeNo ratings yet
- 2011 - Indian DatabaseDocument33 pages2011 - Indian DatabaseGhanta SinghNo ratings yet