You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ID DCU Marine 3 0 0 Global Guide r1Document285 pagesID DCU Marine 3 0 0 Global Guide r1Mahdi DehghankarNo ratings yet
- Generator Automatic Voltage Regulator Operation ManualDocument6 pagesGenerator Automatic Voltage Regulator Operation ManualMahdi DehghankarNo ratings yet
- Quick Guide: Making Modern Living PossibleDocument36 pagesQuick Guide: Making Modern Living PossibleMahdi DehghankarNo ratings yet
- Data Sheet 3WL1116-2CB32-1AA2: ModelDocument7 pagesData Sheet 3WL1116-2CB32-1AA2: ModelMahdi DehghankarNo ratings yet
- Tachimetro Di Gps Velocímetro de Puesto Global 1. Install Installation Verkabelung Installi InstaleDocument2 pagesTachimetro Di Gps Velocímetro de Puesto Global 1. Install Installation Verkabelung Installi InstaleMahdi DehghankarNo ratings yet
- TAD1642GE: Volvo Penta Genset EngineDocument2 pagesTAD1642GE: Volvo Penta Genset EngineMahdi DehghankarNo ratings yet
- O P E R A T O R G U I G E يرﻮﺗاﺮﭘا يﺎﻤﻨﻫار A M F 2 5Document10 pagesO P E R A T O R G U I G E يرﻮﺗاﺮﭘا يﺎﻤﻨﻫار A M F 2 5Mahdi DehghankarNo ratings yet
- Innio BR t6 Update A4 en 2019 Screen Ijb-119006-EnDocument2 pagesInnio BR t6 Update A4 en 2019 Screen Ijb-119006-EnMahdi DehghankarNo ratings yet
- ID-Operator Guide r2 PDFDocument21 pagesID-Operator Guide r2 PDFMahdi DehghankarNo ratings yet
- Connecting A SINAMICS G120 Drive To An S7-300/400 CPU in TIA PortalDocument59 pagesConnecting A SINAMICS G120 Drive To An S7-300/400 CPU in TIA PortalEdwin SaynesNo ratings yet
- CP5611Document6 pagesCP5611mgkso706No ratings yet
- ADC Hardware Control Panels Ref g7Document49 pagesADC Hardware Control Panels Ref g7Techne PhobosNo ratings yet
- Document Hotel Manage Management Java NetbeansDocument21 pagesDocument Hotel Manage Management Java Netbeansvisrani999No ratings yet
- Modicon Quantum - SOE SystemDocument4 pagesModicon Quantum - SOE SystemAgis Rijal AtmawijayaNo ratings yet
- DTV Harris Adc 100 Ds UputstvoDocument128 pagesDTV Harris Adc 100 Ds Uputstvobojan 2No ratings yet
- Gigabyte Ga-8i945g-Pro r1.0 Schematics PDFDocument45 pagesGigabyte Ga-8i945g-Pro r1.0 Schematics PDFbhakta krishnaNo ratings yet
- Module 06Document16 pagesModule 06Hurjay NaguitNo ratings yet
- L2 V4 01 System Devices Configuration E 01Document38 pagesL2 V4 01 System Devices Configuration E 01Rinda_Rayna100% (1)
- ARM Instruction Set: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangDocument25 pagesARM Instruction Set: Computer Organization and Assembly Languages P GZ y GG Yung-Yu ChuangMohit KumarNo ratings yet
- Rapidlogger Installation Manual Rev EDocument2 pagesRapidlogger Installation Manual Rev ERapidlogger Systems LLCNo ratings yet
- Manual Placa Mãe 8vm533m-Rz eDocument36 pagesManual Placa Mãe 8vm533m-Rz egeorgeluNo ratings yet
- UTS SolutionDocument2 pagesUTS SolutionEstika Vriscilla GintingNo ratings yet
- MOTU Universal Audio Installer Read Me MacDocument2 pagesMOTU Universal Audio Installer Read Me MacDott AstNo ratings yet
- ThinkPad T460s Platform SpecificationsDocument1 pageThinkPad T460s Platform SpecificationsccchanNo ratings yet
- cs1104 13Document79 pagescs1104 13Kelvin YipNo ratings yet
- Inspiron 11 3147 Laptop User's Guide en UsDocument104 pagesInspiron 11 3147 Laptop User's Guide en UsHaffez DaudNo ratings yet
- A G I M: Ppendix Nterleaved EmoryDocument4 pagesA G I M: Ppendix Nterleaved Emoryvananhlt18No ratings yet
- Som-6896 User ManualDocument76 pagesSom-6896 User ManualLeandro FonsecaNo ratings yet
- Od 426655398800662100Document1 pageOd 426655398800662100shamikh khanNo ratings yet
- Transparansi Skor Kamou-Camp Quiz Challenge???Document6 pagesTransparansi Skor Kamou-Camp Quiz Challenge???daffa puteraNo ratings yet
- DS-D5022F2-1V1S Datasheet 20231013Document4 pagesDS-D5022F2-1V1S Datasheet 20231013rakib54bdNo ratings yet
- Installation Instructions SW 410 - 1309Document7 pagesInstallation Instructions SW 410 - 1309CH COATZA ISSSTENo ratings yet
- EcoStructure - Foxboro™ SCADA - SCD6000 Controller - 41s2m17Document23 pagesEcoStructure - Foxboro™ SCADA - SCD6000 Controller - 41s2m17Muhd Nu'man HNo ratings yet
- Avaya ERS 3500 Quick Setup Guide For IP OfficeDocument2 pagesAvaya ERS 3500 Quick Setup Guide For IP Officenismo1100% (1)
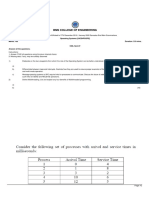
- Question Paper: Bms College of EngineeringDocument3 pagesQuestion Paper: Bms College of EngineeringcoolNo ratings yet
- CS3691 Important QuestionsDocument10 pagesCS3691 Important QuestionssowmiyaNo ratings yet
- FireEye EX 5500 HARDWARE ADMINISTRATION GUIDEDocument30 pagesFireEye EX 5500 HARDWARE ADMINISTRATION GUIDEPierre BoyaNo ratings yet
- Ws c2960x 48fps L DatasheetDocument7 pagesWs c2960x 48fps L DatasheetAmjad AliNo ratings yet
- WJ-NX400: Network RecorderDocument5 pagesWJ-NX400: Network RecordertushardudhwadeNo ratings yet