You might also like
- The Chess CourseDocument632 pagesThe Chess CourseAnand Ramadurai71% (34)
- Baptism EventDocument37 pagesBaptism Eventsharmaine ella guittap68% (19)
- Dripping Faucet OriginalPaperDocument33 pagesDripping Faucet OriginalPaperDiomar Cesar LobãoNo ratings yet
- Engineering Electromagnetic Fields and Waves 2nd Edition PDFDocument638 pagesEngineering Electromagnetic Fields and Waves 2nd Edition PDFxieapi88% (42)
- Prospectus AXA IM NOVALTO - CLO Credit Fund enDocument371 pagesProspectus AXA IM NOVALTO - CLO Credit Fund enLiam KimNo ratings yet
- Department of Genetics: Covid-19 RT PCRDocument1 pageDepartment of Genetics: Covid-19 RT PCRAswathy LNo ratings yet
- Analysis of Structures Subjected To Random Loading Using The Transfer Matrix or Numerical Integration Methods 1992Document4 pagesAnalysis of Structures Subjected To Random Loading Using The Transfer Matrix or Numerical Integration Methods 1992ciscoNo ratings yet
- Robyn HarwoodDocument3 pagesRobyn Harwoodiduhilag75% (8)
- FedEx Project ReportDocument11 pagesFedEx Project ReportRameez Riaz100% (1)
- 3 PDFDocument31 pages3 PDFSebastian LopezNo ratings yet
- Analysis of Supersonic Ow Around Two Bodies of Revolution Near A SurfaceDocument26 pagesAnalysis of Supersonic Ow Around Two Bodies of Revolution Near A SurfaceSIDHARTH ENAGALANo ratings yet
- Lawrence M. Hull - Mach Reflection of Spherical Detonation WavesDocument10 pagesLawrence M. Hull - Mach Reflection of Spherical Detonation WavesGhoree23456100% (1)
- Vasconcellos Et Al 6pagesDocument6 pagesVasconcellos Et Al 6pagessepid123No ratings yet
- Axial Load Frequencies BeamsDocument33 pagesAxial Load Frequencies BeamsKhristiam AlvarezNo ratings yet
- A Systematic Comparison Between RANS and Panel Methods For Propeller Analysis 4435Document13 pagesA Systematic Comparison Between RANS and Panel Methods For Propeller Analysis 4435cupidkhhNo ratings yet
- 2nd Attempt Final Exam-Term - 2019-2020Document2 pages2nd Attempt Final Exam-Term - 2019-2020alhussenyNo ratings yet
- 2nd Attempt Final Exam-Term - 2018-2019Document2 pages2nd Attempt Final Exam-Term - 2018-2019alhussenyNo ratings yet
- N. Kerv : Synthesis Seismic Surface WavesDocument22 pagesN. Kerv : Synthesis Seismic Surface WavesNajeb PendiamanNo ratings yet
- Aerodynamic Characteristics of A Slender Cone-C YlinderDocument26 pagesAerodynamic Characteristics of A Slender Cone-C YlinderGabriel Campos BaroniNo ratings yet
- DSMC Simulations of Rarefied Flow Over A Square CylinderDocument8 pagesDSMC Simulations of Rarefied Flow Over A Square CylinderThosh SanNo ratings yet
- An Empirical Model of Noise Sources in Subsonic Jets, Formulated in A Linear Resolvent FrameworkDocument10 pagesAn Empirical Model of Noise Sources in Subsonic Jets, Formulated in A Linear Resolvent FrameworkugurkarbanNo ratings yet
- Guidance and Control of AuvDocument10 pagesGuidance and Control of AuvJonnada KumarNo ratings yet
- Flutter of Rectangular Panel Supersonic Nasa Report PDFDocument16 pagesFlutter of Rectangular Panel Supersonic Nasa Report PDFSal EhNo ratings yet
- Tutorial On Scaling Analysis of Navier-Stokes Equations: Linear and Non-Linear Dynamics of Fluid-Structure-InteractionDocument6 pagesTutorial On Scaling Analysis of Navier-Stokes Equations: Linear and Non-Linear Dynamics of Fluid-Structure-Interaction1AdityaPathania1No ratings yet
- CFDDocument6 pagesCFDJay VoraNo ratings yet
- MAE 449 - Aerodynamics Lab 2 - Airfoil Pressure Measurements - NACA 0012Document8 pagesMAE 449 - Aerodynamics Lab 2 - Airfoil Pressure Measurements - NACA 0012Ted StinsonNo ratings yet
- Effects of The Approximations Embodied in The Momentum Theory As Applied To The NREL PHASE VI Wind TurbineDocument12 pagesEffects of The Approximations Embodied in The Momentum Theory As Applied To The NREL PHASE VI Wind Turbinedanea haitham abd alrahmanNo ratings yet
- FMFP 2013 Submission 134Document10 pagesFMFP 2013 Submission 134Sagar MehtaNo ratings yet
- Comment On - Active Flutter Control Using Generalized Unsteady Aerodynamic TheoryDocument2 pagesComment On - Active Flutter Control Using Generalized Unsteady Aerodynamic TheoryRitesh SinghNo ratings yet
- Non-Linear Vibration of Cantilever Skew Plates Subjected To Aerodynamic and In-Plane Exciting ForcesDocument14 pagesNon-Linear Vibration of Cantilever Skew Plates Subjected To Aerodynamic and In-Plane Exciting ForcesMOFEEZALAMNo ratings yet
- Analysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowDocument13 pagesAnalysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowallentvmNo ratings yet
- Simulating Vortex Shedding at High Reynolds NumbersDocument6 pagesSimulating Vortex Shedding at High Reynolds NumbersDeniz ümit BayraktutarNo ratings yet
- Perturbation Methods in Atmospheric Flight Mechanics: Air Force Armament Laboratory, Eglin Air Force Base, FlaDocument5 pagesPerturbation Methods in Atmospheric Flight Mechanics: Air Force Armament Laboratory, Eglin Air Force Base, FlaP_leeNo ratings yet
- Archive of SID: Comparison of Static and Dynamic Pushover Analysis in Assessment of The Target DisplacementDocument14 pagesArchive of SID: Comparison of Static and Dynamic Pushover Analysis in Assessment of The Target DisplacementAdel CivilNo ratings yet
- Axial Thrust Load Prediciton of Centrifugal CompressorsDocument44 pagesAxial Thrust Load Prediciton of Centrifugal CompressorsTaylor100% (1)
- 54 - RostamzadehDocument4 pages54 - RostamzadehRidwan FadlikaNo ratings yet
- Accurate Computation of Wave Loads On A Bottom Fixed Circular CylinderDocument4 pagesAccurate Computation of Wave Loads On A Bottom Fixed Circular CylinderTrần Văn CườngNo ratings yet
- Steady State Stokes Flow Interpolation For Fluid Control: TMPS03 MTPS04Document4 pagesSteady State Stokes Flow Interpolation For Fluid Control: TMPS03 MTPS04kevin ostos julcaNo ratings yet
- Compound Comp Nozzle Flow HeiserDocument7 pagesCompound Comp Nozzle Flow Heiserkevin ostos julcaNo ratings yet
- Lindsey Hines Final Report PDFDocument21 pagesLindsey Hines Final Report PDFclimax1364No ratings yet
- TOPIC 6 Elastic and Inelastic SpectraDocument11 pagesTOPIC 6 Elastic and Inelastic SpectraGleanna NiedoNo ratings yet
- Fundamentals of Fluid Mechanics: DisclaimerDocument89 pagesFundamentals of Fluid Mechanics: Disclaimerpraveen_01236No ratings yet
- Stresses From Radial Loads and External Moments in Spherical Pressure VesselsDocument11 pagesStresses From Radial Loads and External Moments in Spherical Pressure VesselsbahmanNo ratings yet
- Numerical Simulation of Laminar Flow Past A Circular Cylinder - 1-s2.0-S0307904X08000243-MainDocument20 pagesNumerical Simulation of Laminar Flow Past A Circular Cylinder - 1-s2.0-S0307904X08000243-MainShanthan GuduruNo ratings yet
- Simulation of Unsteady Ship Maneuvering Using Free-Surface RANS SolverDocument19 pagesSimulation of Unsteady Ship Maneuvering Using Free-Surface RANS Solverandevari100% (1)
- CH 9 Lecture 1Document3 pagesCH 9 Lecture 1Saumya SinhaNo ratings yet
- Free-Surface Simulations Using An Interface-Tracking Finite-Volume Method With 3D Mesh MovementDocument8 pagesFree-Surface Simulations Using An Interface-Tracking Finite-Volume Method With 3D Mesh MovementSandra PowersNo ratings yet
- Indian Institute of Technology, GandhinagarDocument7 pagesIndian Institute of Technology, GandhinagarNishant KumarNo ratings yet
- Prediction of Afflux at Bridge Constrictions Using A Depth Averaged Numerical ModelDocument10 pagesPrediction of Afflux at Bridge Constrictions Using A Depth Averaged Numerical ModelriteshreplyNo ratings yet
- Technical Note Immersed Boundary Method Body Force For Flow Around Thin Bodies With Sharp EdgesDocument5 pagesTechnical Note Immersed Boundary Method Body Force For Flow Around Thin Bodies With Sharp EdgesKian ChuanNo ratings yet
- Paper Spectral Leoben 2012 PDFDocument11 pagesPaper Spectral Leoben 2012 PDFashish38799No ratings yet
- Computational Analysis of Pressure and Wake Characteristics of An Aerofoil in Ground EffectDocument9 pagesComputational Analysis of Pressure and Wake Characteristics of An Aerofoil in Ground EffectVyssionNo ratings yet
- BEACON SM Chem Soc RevDocument47 pagesBEACON SM Chem Soc Revmxp970603No ratings yet
- Infinite Elements For 3 Dimensional Wave - Structure Interaction Problems 1992Document12 pagesInfinite Elements For 3 Dimensional Wave - Structure Interaction Problems 1992ciscoNo ratings yet
- WTT Answer Key Part-ADocument4 pagesWTT Answer Key Part-AsnvijayanNo ratings yet
- Group 5: Chapter 6: Interphase Transport in Isothermal Systems 6.1 Definition of Friction FactorsDocument18 pagesGroup 5: Chapter 6: Interphase Transport in Isothermal Systems 6.1 Definition of Friction Factorssaravthen0% (1)
- Adaptive Trajectory Tracking For Quadrotor Mavs in Presence of Parameter Uncertainties and External DisturbancesDocument6 pagesAdaptive Trajectory Tracking For Quadrotor Mavs in Presence of Parameter Uncertainties and External DisturbancesadilsondissoNo ratings yet
- Applied Mathematics and MechanicsDocument10 pagesApplied Mathematics and Mechanicsinam vfNo ratings yet
- Continuity Equation - Differential Form: DerivationDocument15 pagesContinuity Equation - Differential Form: Derivationprasanth_karthiNo ratings yet
- Effects of Structural Damping: On Flutter O F Stressed PanelsDocument35 pagesEffects of Structural Damping: On Flutter O F Stressed PanelsTRUNG QUOC LENo ratings yet
- Rasheef SpinDocument7 pagesRasheef SpinMohamed SanoosNo ratings yet
- Fluids Ebook - Linear Momentum EquationDocument3 pagesFluids Ebook - Linear Momentum EquationYim Hoe YenNo ratings yet
- Velocity Moments: Capturing the Dynamics: Insights into Computer VisionFrom EverandVelocity Moments: Capturing the Dynamics: Insights into Computer VisionNo ratings yet
- Shaft Design and Its ApplicationDocument19 pagesShaft Design and Its ApplicationAli MahmoudNo ratings yet
- Engineering Computations: Solution of Non-Linear EquationsDocument45 pagesEngineering Computations: Solution of Non-Linear EquationsAli Mahmoud100% (1)
- Diffuser and Nozzle Design Optimization by Entropy Generation MinimizationDocument24 pagesDiffuser and Nozzle Design Optimization by Entropy Generation MinimizationAli MahmoudNo ratings yet
- "Newton's Method and Loops": University of Karbala College of Engineering Petroleum Eng. DepDocument11 pages"Newton's Method and Loops": University of Karbala College of Engineering Petroleum Eng. DepAli MahmoudNo ratings yet
- Design and Failure Analysis of Flange Coupling With Uniform Strengthen BoltsDocument8 pagesDesign and Failure Analysis of Flange Coupling With Uniform Strengthen BoltsAli MahmoudNo ratings yet
- Aerodynamic .. دكتور نبراس محمدDocument21 pagesAerodynamic .. دكتور نبراس محمدAli MahmoudNo ratings yet
- Turbulent Boundary Layer Separation andDocument11 pagesTurbulent Boundary Layer Separation andAli MahmoudNo ratings yet
- "Seismic Data To Estimate Formation Pressure": University of Karbala College of Engineering Petroleum Eng. DepDocument12 pages"Seismic Data To Estimate Formation Pressure": University of Karbala College of Engineering Petroleum Eng. DepAli MahmoudNo ratings yet
- Analytically-Derived Aerodynamic Force & Moment Coefficients For Resident Space Objects in Free-Molecular FlowDocument15 pagesAnalytically-Derived Aerodynamic Force & Moment Coefficients For Resident Space Objects in Free-Molecular FlowAli MahmoudNo ratings yet
- نظريه مكائن ... دكتور نبيلDocument13 pagesنظريه مكائن ... دكتور نبيلAli MahmoudNo ratings yet
- LNG, CNG and LPG Comparison StudyDocument15 pagesLNG, CNG and LPG Comparison StudyAli MahmoudNo ratings yet
- Oldham'S Mechanism and It Is Important Application MachinesDocument12 pagesOldham'S Mechanism and It Is Important Application MachinesAli MahmoudNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument35 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsAli MahmoudNo ratings yet
- ميهاربا لايع دومحم ىفطصم -: مسلاا ةثلاثلا -: ةلحرملا تارئاط كيناكيم ةسدنه -: عرفلا -: ةبرجتلا مسا Roket Engine -: ربتخملا مسا تارئاط تاكرحمDocument9 pagesميهاربا لايع دومحم ىفطصم -: مسلاا ةثلاثلا -: ةلحرملا تارئاط كيناكيم ةسدنه -: عرفلا -: ةبرجتلا مسا Roket Engine -: ربتخملا مسا تارئاط تاكرحمAli MahmoudNo ratings yet
- ميهاربا لايع دومحم ىفطصم -: مسلاا ةثلاثلا -: ةلحرملا تارئاط كيناكيم ةسدنه -: عرفلا -: ةبرجتلا مسا Turbojet ENGINE -: ربتخملا مسا تارئاط تاكرحمDocument7 pagesميهاربا لايع دومحم ىفطصم -: مسلاا ةثلاثلا -: ةلحرملا تارئاط كيناكيم ةسدنه -: عرفلا -: ةبرجتلا مسا Turbojet ENGINE -: ربتخملا مسا تارئاط تاكرحمAli MahmoudNo ratings yet
- No.26 - (3) 2020 Journal of Petroleum Research & Studies (JPRS)Document19 pagesNo.26 - (3) 2020 Journal of Petroleum Research & Studies (JPRS)Ali MahmoudNo ratings yet
- Application of Transportation in Petroleum EngineeringDocument8 pagesApplication of Transportation in Petroleum EngineeringAli Mahmoud100% (1)
- HW 1Document5 pagesHW 1Ali MahmoudNo ratings yet
- Intgration MangmentDocument17 pagesIntgration MangmentAli MahmoudNo ratings yet
- Smart Wells 3Document17 pagesSmart Wells 3Ali MahmoudNo ratings yet
- Immiscible and Miscible Gases Injection To Improve Oil Recovery in Oil ReservoirsDocument12 pagesImmiscible and Miscible Gases Injection To Improve Oil Recovery in Oil ReservoirsAli MahmoudNo ratings yet
- Simulaiton Methods For Polymer Flooding To Improve Oil RecoveryDocument10 pagesSimulaiton Methods For Polymer Flooding To Improve Oil RecoveryAli MahmoudNo ratings yet
- Ali Mahmoud ReserviorDocument9 pagesAli Mahmoud ReserviorAli MahmoudNo ratings yet
- D. Oe4625 Chapter02Document16 pagesD. Oe4625 Chapter02danielmergulhoNo ratings yet
- Propagation. in Nature, Clonal Propagation Occurs by Apomixis (Seed Development WithoutDocument12 pagesPropagation. in Nature, Clonal Propagation Occurs by Apomixis (Seed Development WithoutAmalia ZaidaNo ratings yet
- VCarve Pro V9.0 User ManualDocument437 pagesVCarve Pro V9.0 User ManualCatalin I.No ratings yet
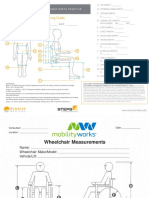
- Attachemnt A - Body and Wheelchair MeasurementDocument2 pagesAttachemnt A - Body and Wheelchair MeasurementNur Adila MokhtarNo ratings yet
- Mindfulness For Exams by Ashley LodgeDocument2 pagesMindfulness For Exams by Ashley Lodgepetit_19794618No ratings yet
- Bagdad ADocument5 pagesBagdad AAnsiif GammachuuNo ratings yet
- Retrofitting of Reinforced Concrete BuildingsDocument44 pagesRetrofitting of Reinforced Concrete BuildingsKrupakl Gowda100% (8)
- Kinesiology Is Described As A Holistic Discipline Because It Combines MindDocument3 pagesKinesiology Is Described As A Holistic Discipline Because It Combines MindPhilip john VillotesNo ratings yet
- Pierre Pontarotti Eds. Evolutionary Biology Genome Evolution, Speciation, Coevolution and Origin of LifeDocument393 pagesPierre Pontarotti Eds. Evolutionary Biology Genome Evolution, Speciation, Coevolution and Origin of LifeJesusNo ratings yet
- 5S Routine Audit FormDocument8 pages5S Routine Audit Formblackbarby100% (3)
- 2015 - Public Transport Performance Evaluation Techniques - A ReviewDocument11 pages2015 - Public Transport Performance Evaluation Techniques - A ReviewdewarucciNo ratings yet
- Revision Sheet 5Document5 pagesRevision Sheet 5tarekbenbelgacem mosbahiNo ratings yet
- Tutorial Details Program: Coreldraw 11 - X5 Difficulty: All Estimated Completion Time: 30 Minutes Step 1: Basic ElementsDocument14 pagesTutorial Details Program: Coreldraw 11 - X5 Difficulty: All Estimated Completion Time: 30 Minutes Step 1: Basic ElementsNasron ZubaidihNo ratings yet
- PE-EC703A Embedded System: Question Set 3: Embedded System Dr. B.C. Roy Engineering CollegeDocument2 pagesPE-EC703A Embedded System: Question Set 3: Embedded System Dr. B.C. Roy Engineering CollegeHarsh KumarNo ratings yet
- Pemberian Obat Dengan Kewaspadaan Tinggi Pada Pasien ICUDocument38 pagesPemberian Obat Dengan Kewaspadaan Tinggi Pada Pasien ICUIndriWatiNo ratings yet
- RealTime 1st Quarter Student GuideDocument28 pagesRealTime 1st Quarter Student GuideHenry Ng'honzelaNo ratings yet
- Dissecting The ND 25 Amp AlternatorDocument17 pagesDissecting The ND 25 Amp AlternatorFranco ValtortaNo ratings yet
- NCM 210 RLE - 10 Herbal Plants Approved by DOHDocument6 pagesNCM 210 RLE - 10 Herbal Plants Approved by DOHLYRIZZA LEA BHEA DESIATANo ratings yet
- A Review of The Outpatient Treatment Methods For COVID-19: A Special Interview With Dr. Pierre KoryDocument41 pagesA Review of The Outpatient Treatment Methods For COVID-19: A Special Interview With Dr. Pierre KoryJan Willem van BorselenNo ratings yet
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Document7 pagesPG 511 B 1 B 1: Ordering Code Series PGP/PGM511Zoran JankovNo ratings yet
- Exercise4 PDFDocument13 pagesExercise4 PDFKnowledge SeekerNo ratings yet
- Beverage Brochure EnglishDocument16 pagesBeverage Brochure Englishsalicurri0% (1)
- Review Article Barium HexaferriteDocument11 pagesReview Article Barium HexaferriteIngrid Bena RiaNo ratings yet
- AbductedDocument160 pagesAbductedSoni Mishra TiwariNo ratings yet