You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Variable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Document71 pagesVariable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. Numan100% (1)
- Vector Control of AC Induction MotorDocument7 pagesVector Control of AC Induction MotorAli H. NumanNo ratings yet
- VHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Document10 pagesVHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Ali H. NumanNo ratings yet
- Vector Control of Cage Induction Motors A Physical Insight, 1996 PDFDocument10 pagesVector Control of Cage Induction Motors A Physical Insight, 1996 PDFAli H. NumanNo ratings yet
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDocument7 pagesVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanNo ratings yet
- Variable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Document72 pagesVariable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNo ratings yet
- Performance Improvement of Single Phase Motors Using Power ElectronicsDocument7 pagesPerformance Improvement of Single Phase Motors Using Power ElectronicshezugNo ratings yet
- Variable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Document10 pagesVariable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Ali H. NumanNo ratings yet
- Sin EncoderDocument6 pagesSin Encoderboynew87No ratings yet
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNo ratings yet
- Reduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Document2 pagesReduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Ali H. NumanNo ratings yet
- Zero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Document6 pagesZero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Ali H. NumanNo ratings yet
- Modeling and Simulation of A Stepping Motor, 1969.Document3 pagesModeling and Simulation of A Stepping Motor, 1969.Ali H. NumanNo ratings yet
- A Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Document9 pagesA Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Ali H. NumanNo ratings yet
- Direct Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeDocument7 pagesDirect Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeAli H. NumanNo ratings yet
- DSP Arch Past-Present-FutureDocument14 pagesDSP Arch Past-Present-FutureSayan GhoshNo ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- Sensor Less Control of IM - With or Without Signal InjectionDocument24 pagesSensor Less Control of IM - With or Without Signal Injectionsajs201No ratings yet
- Digital Simulation of Field Oriented Control Using ANSIM Program, 1996.Document4 pagesDigital Simulation of Field Oriented Control Using ANSIM Program, 1996.Ali H. NumanNo ratings yet
- A New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Document9 pagesA New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Ali H. NumanNo ratings yet
- BLDC Resonant PoleDocument8 pagesBLDC Resonant Poleav5009No ratings yet
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDocument7 pagesVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanNo ratings yet
- Sensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Document135 pagesSensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNo ratings yet
- Digital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Document6 pagesDigital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Ali H. NumanNo ratings yet
- DC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenDocument19 pagesDC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenAli H. NumanNo ratings yet
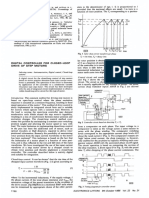
- Digital Controller For Closed-Loop Drive of Step Motors, 1986.Document2 pagesDigital Controller For Closed-Loop Drive of Step Motors, 1986.Ali H. NumanNo ratings yet
- Effective Estimation of Speed and Rotor Position Using Kalman FilterDocument7 pagesEffective Estimation of Speed and Rotor Position Using Kalman FilterAli H. NumanNo ratings yet
- Efficient Parallel Control Scheme of Single Phase Inverters, 2007.Document5 pagesEfficient Parallel Control Scheme of Single Phase Inverters, 2007.Ali H. NumanNo ratings yet
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 218477these Stufy of An in Vehicule Infotainement SystemDocument79 pages218477these Stufy of An in Vehicule Infotainement SystemKhaled GharbiNo ratings yet
- Coding & Decoding - QuestionsDocument4 pagesCoding & Decoding - QuestionsmoulieswaranNo ratings yet
- Setracker User ManualDocument8 pagesSetracker User ManualRaden Mas SularsoNo ratings yet
- ANOVA For Linear Model FenolikDocument10 pagesANOVA For Linear Model FenolikAnonymous 4ESTZLGrNo ratings yet
- CyberArk Training Course Content v1Document9 pagesCyberArk Training Course Content v1Mensis LatinsNo ratings yet
- 2sc3055 PDFDocument3 pages2sc3055 PDFLuis CansinoNo ratings yet
- Power Solutions provides 1 KVA UPS system quotation for Ashirwad HospitalDocument2 pagesPower Solutions provides 1 KVA UPS system quotation for Ashirwad HospitalkapilNo ratings yet
- Community Needs Assessment PresentationDocument22 pagesCommunity Needs Assessment PresentationSundara Moorthy NadarNo ratings yet
- Calculus Integration by Substitution: Activity OverviewDocument4 pagesCalculus Integration by Substitution: Activity Overviewrolando ojedaNo ratings yet
- Mock Test & SPOT PRELIMSDocument4 pagesMock Test & SPOT PRELIMSHrid 2No ratings yet
- Pom 10Document2 pagesPom 10camilleNo ratings yet
- Magna 3Document36 pagesMagna 3mercruiserNo ratings yet
- Vol2 No 2Document148 pagesVol2 No 2IJCNSNo ratings yet
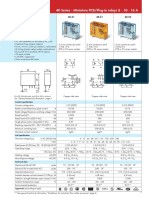
- Finder Relays Series 40 PDFDocument8 pagesFinder Relays Series 40 PDFCosmin ConstantinescuNo ratings yet
- S - R - Module - 3 Inter-VLAN RoutingDocument43 pagesS - R - Module - 3 Inter-VLAN Routingyoussef hossamNo ratings yet
- 2 Chapter 1 Appendices TemplateDocument38 pages2 Chapter 1 Appendices Templatehenry jhonNo ratings yet
- K.S. School of Engineering and Management, Bangalore - 560109Document2 pagesK.S. School of Engineering and Management, Bangalore - 560109Pradeep BiradarNo ratings yet
- Application Ward-Leonard Block 76 PDFDocument21 pagesApplication Ward-Leonard Block 76 PDFDeMen NguyenNo ratings yet
- 5.PPT5 Packaging+SpecificationsDocument13 pages5.PPT5 Packaging+SpecificationsVKNo ratings yet
- LTRT-09906 310HD IP Phone Administrator's Manual v1.4.1Document102 pagesLTRT-09906 310HD IP Phone Administrator's Manual v1.4.1Thanh LeNo ratings yet
- Bist (Built in Self Test)Document4 pagesBist (Built in Self Test)Priya GroverNo ratings yet
- Risks of Electronic-BankingDocument79 pagesRisks of Electronic-BankingferoNo ratings yet
- ASRock Industrial Company Profile - 2023.2.20Document21 pagesASRock Industrial Company Profile - 2023.2.20Sujit MoreNo ratings yet
- Archery DocumentDocument25 pagesArchery DocumentChandrasekhar Nandigama0% (2)
- Data Link Layer CRCDocument20 pagesData Link Layer CRCAbhishek singhNo ratings yet
- Modelling and Simulation of The BLDC Electric Drive System Using SIMULINK/MATLAB For A Hybrid VehicleDocument36 pagesModelling and Simulation of The BLDC Electric Drive System Using SIMULINK/MATLAB For A Hybrid Vehicleks pNo ratings yet
- Consultancy For Design Development and Implementation of SMSUSSD GatewayDocument6 pagesConsultancy For Design Development and Implementation of SMSUSSD GatewaylvlnprajuNo ratings yet
- CISSP Answer ExplanationDocument115 pagesCISSP Answer ExplanationdavidsenabreNo ratings yet
- Un LP Request FormDocument4 pagesUn LP Request FormedonaNo ratings yet