You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Scientology Abridged Dictionary 1973Document21 pagesScientology Abridged Dictionary 1973Cristiano Manzzini100% (2)
- SVPWM Thesis Prepared by DeekshitDocument81 pagesSVPWM Thesis Prepared by Deekshitchunduri_rambabuNo ratings yet
- 2010-12 600 800 Rush Switchback RMK Service Manual PDFDocument430 pages2010-12 600 800 Rush Switchback RMK Service Manual PDFBrianCook73% (11)
- Cell Selection ReselectionDocument35 pagesCell Selection ReselectionThiaguNo ratings yet
- SPWM V/HZ InverterDocument51 pagesSPWM V/HZ InverterLabi BajracharyaNo ratings yet
- Ketchikan Shipyard Improvements Plan CompleteDocument230 pagesKetchikan Shipyard Improvements Plan CompleteOpó Ishak Bawias Adare100% (1)
- SVM Vs PWMDocument11 pagesSVM Vs PWMSravya BAndiNo ratings yet
- Pulse-Width Modulation PDFDocument8 pagesPulse-Width Modulation PDFSindhuja ThogaruNo ratings yet
- Space Vector PWM - 2Document6 pagesSpace Vector PWM - 2guanitouNo ratings yet
- Business Analysis FoundationsDocument39 pagesBusiness Analysis FoundationsPriyankaNo ratings yet
- ClientsDocument7 pagesClientsLiane PanahacNo ratings yet
- Selective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersDocument6 pagesSelective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersseventhsensegroupNo ratings yet
- Simulation and Comparison of SPWM and SVPWM Techniques for InvertersDocument6 pagesSimulation and Comparison of SPWM and SVPWM Techniques for InvertersIkram RidhoNo ratings yet
- SPWM With Variable Carrier Synchronization for Multilevel InvertersDocument6 pagesSPWM With Variable Carrier Synchronization for Multilevel InvertersDevendra HoleyNo ratings yet
- Evaluation of Current Ripple Amplitude in Three-Phase PWM Voltage Source InvertersDocument6 pagesEvaluation of Current Ripple Amplitude in Three-Phase PWM Voltage Source InvertersluanleNo ratings yet
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Isie 2000 930468Document9 pagesIsie 2000 930468AK KhanNo ratings yet
- A High-Performance Generalized Discontinuous PWM AlgorithmDocument13 pagesA High-Performance Generalized Discontinuous PWM AlgorithmBrahmananda Reddy TeegalaNo ratings yet
- Multi-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LDocument6 pagesMulti-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LveguruprasadNo ratings yet
- Holtz 1992 PWMDocument11 pagesHoltz 1992 PWMSamuelPereiraNo ratings yet
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaNo ratings yet
- Comparison of SPWM, THIPWM and PDPWM Techniques for Voltage Source InvertersDocument16 pagesComparison of SPWM, THIPWM and PDPWM Techniques for Voltage Source InvertersRendy MuhammadNo ratings yet
- Generador de Señal Modulada Por Ancho de Pulso (PWM)Document4 pagesGenerador de Señal Modulada Por Ancho de Pulso (PWM)Juan PaNo ratings yet
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 pagesResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007No ratings yet
- International Journal of Computational Engineering Research (IJCER)Document7 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- PES Lab Report 1Document22 pagesPES Lab Report 1UJJAL CHATTERJEENo ratings yet
- (IJET-V1I6P3) Authors:Bachwad M.R., Maske Ashadeep MDocument4 pages(IJET-V1I6P3) Authors:Bachwad M.R., Maske Ashadeep MInternational Journal of Engineering and TechniquesNo ratings yet
- Design and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemDocument6 pagesDesign and Simulation of an Inverter With High Frequency Sinusoidal PWM Switching Technique for Harmonic Reduction in a Standalone Utility Grid Harmonic Reduction in a Standalone Utility Grid Synchronized Photovoltaic SystemS.m. FerdousNo ratings yet
- 6 Michal KNAPCZYK Krzysztof PIENKOWSKI 2 PDFDocument16 pages6 Michal KNAPCZYK Krzysztof PIENKOWSKI 2 PDFDevendra HoleyNo ratings yet
- Variable Switching Frequency Hybrid PWM Technique For Switching Lossreduction in A Three-Phase Two-Level Voltage Source InverteDocument8 pagesVariable Switching Frequency Hybrid PWM Technique For Switching Lossreduction in A Three-Phase Two-Level Voltage Source InverteAlexandruIonutNo ratings yet
- Chapter 2 NewDocument11 pagesChapter 2 NewKyaw SoeNo ratings yet
- Space Vector Pulse Width Modulation PDFDocument5 pagesSpace Vector Pulse Width Modulation PDFnarendra kumarNo ratings yet
- Space Vector Pulse Width Modulation PDFDocument5 pagesSpace Vector Pulse Width Modulation PDFnarendra kumarNo ratings yet
- Three Phase Current Source Inverter Using Space Vector PWM For Grid Connected ApplicationsDocument4 pagesThree Phase Current Source Inverter Using Space Vector PWM For Grid Connected ApplicationstheijesNo ratings yet
- Modulation Techniques For Matrix ConvertersDocument7 pagesModulation Techniques For Matrix Convertersdheerajkumar02527289No ratings yet
- Design of SPWM Based Three Phase Inverter Model: Tanuhsree Bhattacharjee Dr. Majid Jamil Dr. Anup JanaDocument6 pagesDesign of SPWM Based Three Phase Inverter Model: Tanuhsree Bhattacharjee Dr. Majid Jamil Dr. Anup JanaandersonNo ratings yet
- An Analysis On Switching Loss Optimized PWM Strategies For Three Phase PWM Voltage Source ConvertersDocument6 pagesAn Analysis On Switching Loss Optimized PWM Strategies For Three Phase PWM Voltage Source ConvertersGanesh ChallaNo ratings yet
- Regular Sampled PWMDocument11 pagesRegular Sampled PWMg.jayakrishnaNo ratings yet
- Pulsewidth Modulation A SurveyDocument8 pagesPulsewidth Modulation A SurveyDr-Ismayil CNo ratings yet
- A Comparison On Power Electronic InverterDocument11 pagesA Comparison On Power Electronic InverterKrishnaveni Subramani SNo ratings yet
- A Novel SVPWM Overmodulation Technique Based On Voltage Correcting FunctionDocument8 pagesA Novel SVPWM Overmodulation Technique Based On Voltage Correcting Functionsravya saiNo ratings yet
- Simulation of Cascaded H-Bridge Multilevel Inverter Using OHSW PWM For The Elimination of HarmonicsDocument14 pagesSimulation of Cascaded H-Bridge Multilevel Inverter Using OHSW PWM For The Elimination of HarmonicsBib SaNo ratings yet
- Design and Analysis of Various Inverters Using Different PWM TechniquesDocument11 pagesDesign and Analysis of Various Inverters Using Different PWM TechniqueschaitanyaNo ratings yet
- Digital Scalar Pulse Width Modulation Methods For Voltage Source Inverter Fed Ac DriveDocument7 pagesDigital Scalar Pulse Width Modulation Methods For Voltage Source Inverter Fed Ac DriveijsretNo ratings yet
- Space Vector Pulse Width Modulation-Libre PDFDocument6 pagesSpace Vector Pulse Width Modulation-Libre PDFlongNo ratings yet
- 00982262Document11 pages00982262Balkrushna KankotiyaNo ratings yet
- A Study of Comparative Analysis of Different PWMDocument6 pagesA Study of Comparative Analysis of Different PWMwilliam chaconNo ratings yet
- Speed Control of Space Vector Modulated Inverter Driven Induction MotorDocument11 pagesSpeed Control of Space Vector Modulated Inverter Driven Induction MotorPraba HaranNo ratings yet
- Pulse-width modulation (PWM) explained: control power to devices with pulsesDocument7 pagesPulse-width modulation (PWM) explained: control power to devices with pulsesAnonymous E4Rbo2sNo ratings yet
- Discontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationDocument13 pagesDiscontinuous PWM Techniques For Open-End Winding Induction Motor Drive For Zero Sequence Voltage EliminationarunkmepesNo ratings yet
- Simulation of PWM Inverter Using MATLABDocument28 pagesSimulation of PWM Inverter Using MATLABnagatejaNo ratings yet
- THD Reduction in Multilevel Inverters Using Real-Time AlgorithmDocument12 pagesTHD Reduction in Multilevel Inverters Using Real-Time AlgorithmInternational Organization of Scientific Research (IOSR)No ratings yet
- 7.4.2 Working Principles of The Inverter: PV Systems and Grid-Connected Technologies 283Document2 pages7.4.2 Working Principles of The Inverter: PV Systems and Grid-Connected Technologies 283lucian toledoNo ratings yet
- Three-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveDocument6 pagesThree-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveKuntal SatpathiNo ratings yet
- Improving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshDocument5 pagesImproving The Power Quality by MLCI Type DSTATCOM: P. Manoj Kumar Y. Sumanth S. N. V. GaneshsarathNo ratings yet
- Abc-Dq and Dq-AbcDocument10 pagesAbc-Dq and Dq-Abcvvps777No ratings yet
- Harmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BDocument5 pagesHarmonic Elimination in VSC HVDC System Using SHE-PWM: B. R K, K. M R, G. V S BMYNAMENo ratings yet
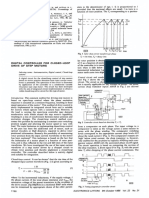
- Pulse-Width-Modulation DC Chopper Using Labview SoftwareDocument5 pagesPulse-Width-Modulation DC Chopper Using Labview SoftwareFlorin LațcuNo ratings yet
- Minimization of Total Harmonic Distortion Using Pulse Width TechniqueDocument12 pagesMinimization of Total Harmonic Distortion Using Pulse Width TechniqueIOSRjournalNo ratings yet
- Proceedings of the Second International Conference on Science and EngineeringDocument7 pagesProceedings of the Second International Conference on Science and Engineering20021103 Vũ Đức DũngNo ratings yet
- Multistring Five-Level Inverter With Novel PWMDocument13 pagesMultistring Five-Level Inverter With Novel PWMsandeepbabu28No ratings yet
- Modulation IndexDocument6 pagesModulation IndexyechuriyasaswiniNo ratings yet
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocument12 pagesLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadNo ratings yet
- Advanced PWM Techniques For Control of Power Electronic Converters in PV and Motor Drive SystemsDocument21 pagesAdvanced PWM Techniques For Control of Power Electronic Converters in PV and Motor Drive SystemsAman MalikNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDocument7 pagesVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanNo ratings yet
- Variable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Document71 pagesVariable Speed Control of 3-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. Numan100% (1)
- Variable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Document72 pagesVariable Speed Control of Single-Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNo ratings yet
- Performance Improvement of Single Phase Motors Using Power ElectronicsDocument7 pagesPerformance Improvement of Single Phase Motors Using Power ElectronicshezugNo ratings yet
- Variable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Document10 pagesVariable-Structure Torque Control of Induction Motors Using Space Vector Modulation, 2004.Ali H. NumanNo ratings yet
- Reduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Document2 pagesReduced Order Extended Kalman Filter For Estimation of Induction Motor Rotor Resistance, 1993.Ali H. NumanNo ratings yet
- Vector Control of Cage Induction Motors A Physical Insight, 1996 PDFDocument10 pagesVector Control of Cage Induction Motors A Physical Insight, 1996 PDFAli H. NumanNo ratings yet
- Vector Control of AC Induction MotorDocument7 pagesVector Control of AC Induction MotorAli H. NumanNo ratings yet
- VHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Document10 pagesVHDL Simulation of Direct Torque Controlled Induction Motor Drive, 2008.Ali H. NumanNo ratings yet
- Zero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Document6 pagesZero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Ali H. NumanNo ratings yet
- Sin EncoderDocument6 pagesSin Encoderboynew87No ratings yet
- Modeling and Simulation of A Stepping Motor, 1969.Document3 pagesModeling and Simulation of A Stepping Motor, 1969.Ali H. NumanNo ratings yet
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. NumanNo ratings yet
- Direct Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeDocument7 pagesDirect Self Control of Inverter-Fed Induction Machine, A Basis For Speed Control Without Speed-MeAli H. NumanNo ratings yet
- DSP Arch Past-Present-FutureDocument14 pagesDSP Arch Past-Present-FutureSayan GhoshNo ratings yet
- A Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Document9 pagesA Fully Digitized Field-Oriented Controlled Induction Motor Drive Using Only Current Sensors, 1992Ali H. NumanNo ratings yet
- BLDC Resonant PoleDocument8 pagesBLDC Resonant Poleav5009No ratings yet
- Digital Simulation of Field Oriented Control Using ANSIM Program, 1996.Document4 pagesDigital Simulation of Field Oriented Control Using ANSIM Program, 1996.Ali H. NumanNo ratings yet
- A New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Document9 pagesA New Algorithm For Simulation of Power Electronic Systems Using Piecewise-Linear Device Models, 1Ali H. NumanNo ratings yet
- Sensor Less Control of IM - With or Without Signal InjectionDocument24 pagesSensor Less Control of IM - With or Without Signal Injectionsajs201No ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- Vector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFDocument7 pagesVector Control of Permanent Magnet Synchronous Motors Without Position and Speed Sensors, 1995 PDFAli H. NumanNo ratings yet
- Effective Estimation of Speed and Rotor Position Using Kalman FilterDocument7 pagesEffective Estimation of Speed and Rotor Position Using Kalman FilterAli H. NumanNo ratings yet
- Sensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Document135 pagesSensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNo ratings yet
- Digital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Document6 pagesDigital Implementation of Sliding Mode Fuzzy Controllers For Boost Converters, 2006.Ali H. NumanNo ratings yet
- Efficient Parallel Control Scheme of Single Phase Inverters, 2007.Document5 pagesEfficient Parallel Control Scheme of Single Phase Inverters, 2007.Ali H. NumanNo ratings yet
- Digital Controller For Closed-Loop Drive of Step Motors, 1986.Document2 pagesDigital Controller For Closed-Loop Drive of Step Motors, 1986.Ali H. NumanNo ratings yet
- Digital Control Methods For Current Sharing of Interleaved Synchronous, 2004.Document7 pagesDigital Control Methods For Current Sharing of Interleaved Synchronous, 2004.Ali H. NumanNo ratings yet
- DC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenDocument19 pagesDC 12-24V 30A Three Phase Power Hardware For Either PMSM or AC Induction Machines, Texas InstrumenAli H. NumanNo ratings yet
- Design & Construction of Substation 16P Painting System ComplianceDocument103 pagesDesign & Construction of Substation 16P Painting System ComplianceRamil LazNo ratings yet
- Phaseo Abl7 Abl8 Abl8rps24100Document9 pagesPhaseo Abl7 Abl8 Abl8rps24100Magda DiazNo ratings yet
- GKInvest Market ReviewDocument66 pagesGKInvest Market ReviewjhonxracNo ratings yet
- Klein & Kulick Scandolous ActsDocument20 pagesKlein & Kulick Scandolous ActsClaudia Costa GarcíaNo ratings yet
- Internal Peripherals of Avr McusDocument2 pagesInternal Peripherals of Avr McusKuldeep JashanNo ratings yet
- Act 1&2 and SAQ No - LawDocument4 pagesAct 1&2 and SAQ No - LawBududut BurnikNo ratings yet
- Sample QuestionsDocument70 pagesSample QuestionsBushra MaryamNo ratings yet
- Final - WPS PQR 86Document4 pagesFinal - WPS PQR 86Parag WadekarNo ratings yet
- Communications201101 DLDocument132 pagesCommunications201101 DLAle SandovalNo ratings yet
- Time Table Semester II 2019-2020Document18 pagesTime Table Semester II 2019-2020Shiv Kumar MeenaNo ratings yet
- Digital Water Monitoring and Turbidity Quality System Using MicrocontrollerDocument8 pagesDigital Water Monitoring and Turbidity Quality System Using MicrocontrollerIrin DwiNo ratings yet
- Service Parts List: 54-26-0005 2551-20 M12™ FUEL™ SURGE™ 1/4" Hex Hydraulic Driver K42ADocument2 pagesService Parts List: 54-26-0005 2551-20 M12™ FUEL™ SURGE™ 1/4" Hex Hydraulic Driver K42AAmjad AlQasrawi100% (1)
- Understanding 2006 PSAT-NMSQT ScoresDocument8 pagesUnderstanding 2006 PSAT-NMSQT ScorestacobeoNo ratings yet
- True False Survey FinalDocument2 pagesTrue False Survey Finalwayan_agustianaNo ratings yet
- Solutions: Spheres, Cones and CylindersDocument13 pagesSolutions: Spheres, Cones and CylindersKeri-ann MillarNo ratings yet
- Agilent Cool On-Column Operation ManualDocument42 pagesAgilent Cool On-Column Operation Manualdmcevoy1965No ratings yet
- BarclaysDocument5 pagesBarclaysMehul KelkarNo ratings yet
- Environmental Threats Differentiated Reading Comprehension Ver 1Document20 pagesEnvironmental Threats Differentiated Reading Comprehension Ver 1Camila DiasNo ratings yet
- ChromosomesDocument24 pagesChromosomesapi-249102379No ratings yet
- Business EnvironmentDocument12 pagesBusiness EnvironmentAbhinav GuptaNo ratings yet
- PiXL Knowledge Test ANSWERS - AQA B1 CORE Science - Legacy (2016 and 2017)Document12 pagesPiXL Knowledge Test ANSWERS - AQA B1 CORE Science - Legacy (2016 and 2017)Mrs S BakerNo ratings yet
- Week 1 Gec 106Document16 pagesWeek 1 Gec 106Junjie FuentesNo ratings yet
- Polygenic InheritanceDocument13 pagesPolygenic InheritanceSandeep Kumar RaghuvanshiNo ratings yet
- XXCCCDocument17 pagesXXCCCwendra adi pradanaNo ratings yet