You might also like
- Making Sense of Spiritual DevelopmentDocument28 pagesMaking Sense of Spiritual DevelopmentRudy TejalaksanaNo ratings yet
- Estimate Friction Factor AccuracyDocument2 pagesEstimate Friction Factor Accuracyjoatanmelo6775No ratings yet
- Kenneth E Hagin - Leaflet - The New Birth (Nova Criatura)Document6 pagesKenneth E Hagin - Leaflet - The New Birth (Nova Criatura)Állisson Bruno LimaNo ratings yet
- ALX Milestone 2Document2 pagesALX Milestone 2MennaNo ratings yet
- Get Free Access To This Document by Contributing To Scribd: Kenneth E. Hagin The Art of PrayerDocument1 pageGet Free Access To This Document by Contributing To Scribd: Kenneth E. Hagin The Art of Prayermpcd07No ratings yet
- The Impact of DHIS 2 in Kenya - A User PerspectiveDocument12 pagesThe Impact of DHIS 2 in Kenya - A User PerspectiveJames GathogoNo ratings yet
- The Bible Its Hell and Its Ages by T. J. McCrossan Scribd 7Document145 pagesThe Bible Its Hell and Its Ages by T. J. McCrossan Scribd 7Peggy Bracken Stagno0% (1)
- Find Measures of Position from Ungrouped DataDocument16 pagesFind Measures of Position from Ungrouped DataLoralie Dela Cruz Amantiad75% (4)
- PDE Sci Eng PDFDocument192 pagesPDE Sci Eng PDFgoeffNo ratings yet
- Introduction To Kernel SmoothingDocument24 pagesIntroduction To Kernel SmoothingwillrentNo ratings yet
- Kernel Density EstimationDocument10 pagesKernel Density Estimationjuan camiloNo ratings yet
- Exploring Kernel Density Estimation and Bandwidth Selection MethodsDocument46 pagesExploring Kernel Density Estimation and Bandwidth Selection MethodsOmotayo Abayomi100% (1)
- MicFood Blog Proverbs 8 Part-2 God The Son Is The Divine WisdomDocument3 pagesMicFood Blog Proverbs 8 Part-2 God The Son Is The Divine WisdomMichael ValvesNo ratings yet
- The Gospel.2 - Nov. 2015 UpdatedDocument2 pagesThe Gospel.2 - Nov. 2015 UpdatedAy_deleNo ratings yet
- 28 of The Communion of SaintsDocument5 pages28 of The Communion of SaintsDerek TalleyNo ratings yet
- How Faith Works - Google SearchDocument1 pageHow Faith Works - Google SearchkemazilaNo ratings yet
- 3 Prayer Secrets to Revolutionize Your LifeDocument7 pages3 Prayer Secrets to Revolutionize Your LifeAiskellNo ratings yet
- Death Is Not The End - DaughertyDocument23 pagesDeath Is Not The End - DaughertySounds For The SoulNo ratings yet
- Must Christians Suffer? - What Are Your Limits? - It's Okay To Cry - Tips For SuccessDocument19 pagesMust Christians Suffer? - What Are Your Limits? - It's Okay To Cry - Tips For SuccessSanjay100% (1)
- 4 5891039003607566988 PDFDocument4 pages4 5891039003607566988 PDFRobin ReverolNo ratings yet
- Katahdin Business PlanDocument32 pagesKatahdin Business PlanJohn NzinahoraNo ratings yet
- 32 of The Lord's SupperDocument6 pages32 of The Lord's SupperDerek TalleyNo ratings yet
- Pastor Chris Teaching-PCT 126-140119Document15 pagesPastor Chris Teaching-PCT 126-140119Odediran kayodeNo ratings yet
- The Heart of The Matter: Hand Me Another Brick: Timeless Lessons On LeadershipDocument17 pagesThe Heart of The Matter: Hand Me Another Brick: Timeless Lessons On LeadershipAnonymous WIhmu39ibw100% (1)
- From The Archives Kids' Page: - Are You in Good Standing With God? - Ready For Basic Training? - A Call To PrayerDocument16 pagesFrom The Archives Kids' Page: - Are You in Good Standing With God? - Ready For Basic Training? - A Call To PrayerLia SouzaNo ratings yet
- Gospel of John - The SpiritDocument1 pageGospel of John - The SpiritMalcolm CoxNo ratings yet
- 2007-09 Bvov PDFDocument32 pages2007-09 Bvov PDFRaghunath KoraniNo ratings yet
- Faith That PrevailsDocument23 pagesFaith That Prevailsngigipn349No ratings yet
- Throne of GraceDocument4 pagesThrone of GraceGiovanni Christian LadinesNo ratings yet
- LBS Notes 9/7/21: Andrew Wommack and Carrie PickettDocument3 pagesLBS Notes 9/7/21: Andrew Wommack and Carrie PickettTabalbaAcebes GeraldreyNo ratings yet
- Baptism of The Holy Ghost Part 1Document8 pagesBaptism of The Holy Ghost Part 1ARRENEKE AYUKNo ratings yet
- Beyond Religion Awaits A Relationship That Will Change You Life PDFDocument3 pagesBeyond Religion Awaits A Relationship That Will Change You Life PDFKamau GabrielNo ratings yet
- 8.26 Free - The Power of The Real Gospel and Your True Identity PDFDocument65 pages8.26 Free - The Power of The Real Gospel and Your True Identity PDFfilozofioNo ratings yet
- 10 Scriptural Confessions - Bob YandianDocument3 pages10 Scriptural Confessions - Bob YandianENIOLA TOSIN100% (1)
- Force of Integrity - Creflo A. Dollar, JRDocument24 pagesForce of Integrity - Creflo A. Dollar, JRGods WrathNo ratings yet
- WOF 1975 - 11 October, Understanding Righteousness PDFDocument8 pagesWOF 1975 - 11 October, Understanding Righteousness PDFAdebambo AinaNo ratings yet
- Gospel Truth Magazine Spring Summer 2017Document36 pagesGospel Truth Magazine Spring Summer 20179052359751No ratings yet
- Rev. A.B. Simpson - Standing On FaithDocument70 pagesRev. A.B. Simpson - Standing On FaithWafutu100% (3)
- Thy Faith Hath Made Thee Whole Sermon and Outline by Charles A. YawnDocument4 pagesThy Faith Hath Made Thee Whole Sermon and Outline by Charles A. YawnCharles A. YawnNo ratings yet
- The Purposes of the Holy Spirit AnointingDocument3 pagesThe Purposes of the Holy Spirit AnointingjohnpratheeshNo ratings yet
- John Richards - HealingDocument21 pagesJohn Richards - HealingMike NewmanNo ratings yet
- 5.principle #2: Know Your Potential For Fulfilling Vision 6.principle #3: Develop A Concrete Plan For Your VisionDocument33 pages5.principle #2: Know Your Potential For Fulfilling Vision 6.principle #3: Develop A Concrete Plan For Your VisionDAVENo ratings yet
- Romans12!1!8 SlidesDocument12 pagesRomans12!1!8 SlidesnelsbieNo ratings yet
- Panasonic DMR E55Document61 pagesPanasonic DMR E55Emerson DS CostaNo ratings yet
- Part 02 He That Dwells.Document8 pagesPart 02 He That Dwells.ralph_knowlesNo ratings yet
- Abraham-Part 1 Bob YandianDocument8 pagesAbraham-Part 1 Bob YandianAna Carolina CoutinhoNo ratings yet
- Rhapsody of Realities June 2020Document80 pagesRhapsody of Realities June 2020Rhaine KaisiNo ratings yet
- Ever Increasing Faith Magazine - Spring 2011Document32 pagesEver Increasing Faith Magazine - Spring 2011jsuccessNo ratings yet
- Business Law: Sales of Goods Act Part 2Document22 pagesBusiness Law: Sales of Goods Act Part 2Evangelist Kabaso SydneyNo ratings yet
- JSMI PrayerOfPetitionDocument1 pageJSMI PrayerOfPetitionRaghunath KoraniNo ratings yet
- Divine HealingDocument84 pagesDivine Healingntv2000No ratings yet
- Curry Blake New Man ManualDocument12 pagesCurry Blake New Man ManualCN NdubuisiNo ratings yet
- Confusion MatrixDocument5 pagesConfusion MatrixretnoNo ratings yet
- Does Prayer Change Things by R. C SproulDocument97 pagesDoes Prayer Change Things by R. C SproulIsraelisNo ratings yet
- EIF Magazine Summer 2008Document24 pagesEIF Magazine Summer 2008jsuccessNo ratings yet
- Leaflet - Understanding Our Pla - Kenneth E. HaginDocument6 pagesLeaflet - Understanding Our Pla - Kenneth E. HaginJason Rowland100% (1)
- 08 2010 Fall WebDocument40 pages08 2010 Fall WebhannahsamNo ratings yet
- The Key To The SupernaturalDocument12 pagesThe Key To The SupernaturalLittle Orc LalungNo ratings yet
- BNT180122 Broadcast Notes Gloria Copeland and Billye Brim-Trk-20180102Document13 pagesBNT180122 Broadcast Notes Gloria Copeland and Billye Brim-Trk-20180102AiskellNo ratings yet
- This Is The WORK of GodDocument11 pagesThis Is The WORK of Godptnyagortey91No ratings yet
- Use Your Anointing to Do Good WorksDocument2 pagesUse Your Anointing to Do Good WorksJohn NzinahoraNo ratings yet
- 07au MidtermDocument17 pages07au MidtermEman AsemNo ratings yet
- Cluster ValidationDocument47 pagesCluster ValidationZeeshan AliNo ratings yet
- LectureNotes New PDFDocument112 pagesLectureNotes New PDFimranNo ratings yet
- Radial Basis Function Interpolation: Kim Day Jessie TwiggerDocument22 pagesRadial Basis Function Interpolation: Kim Day Jessie TwiggerimranNo ratings yet
- Kde Presentation PDFDocument105 pagesKde Presentation PDFimranNo ratings yet
- 10 1 1 1013 5250 PDFDocument17 pages10 1 1 1013 5250 PDFimranNo ratings yet
- Differential Eqautions PDFDocument45 pagesDifferential Eqautions PDFRahul PinnamaneniNo ratings yet
- Performing a Chi-Square Test of Independence in PSPPDocument6 pagesPerforming a Chi-Square Test of Independence in PSPPGianne GajardoNo ratings yet
- 5 WhysDocument14 pages5 WhyssunilbholNo ratings yet
- Math 1010 Project 2 For E-PortfolioDocument6 pagesMath 1010 Project 2 For E-Portfolioapi-272560483No ratings yet
- Quality of Analytical Measurements: Statistical Methods For Internal ValidationDocument60 pagesQuality of Analytical Measurements: Statistical Methods For Internal ValidationCalidad LassNo ratings yet
- Andres G. Fortino - Text Analytics For Business Decisions - A Case Study Approach-Mercury Learning and Information (2021)Document333 pagesAndres G. Fortino - Text Analytics For Business Decisions - A Case Study Approach-Mercury Learning and Information (2021)arry widodoNo ratings yet
- Rosen Gradient Projection MethodDocument7 pagesRosen Gradient Projection MethodSreevatsanadigNo ratings yet
- Analytical Chemistry Hand-Out 1Document11 pagesAnalytical Chemistry Hand-Out 1Mark Jesson Datario100% (1)
- Chapter-1 Successive Differentiation: Topic-1.1Document11 pagesChapter-1 Successive Differentiation: Topic-1.1Satish BarotNo ratings yet
- Treatment of Experimental Data: Prof. Anand Kumar Tiwari DDIT, NadiadDocument19 pagesTreatment of Experimental Data: Prof. Anand Kumar Tiwari DDIT, NadiadDivyamNo ratings yet
- Boundary Integral Equations in Elasticity TheoryDocument286 pagesBoundary Integral Equations in Elasticity Theoryroy 123No ratings yet
- DocxDocument13 pagesDocxChow DhuryNo ratings yet
- Math 4511Document11 pagesMath 4511Solutions MasterNo ratings yet
- 1L LP Transformation TricksDocument12 pages1L LP Transformation TrickscaspersoongNo ratings yet
- BDocument4 pagesBAnonymous JwAC4yPNo ratings yet
- Systematized Literature Review On Financial Inclusion and Exclusion in Developed CountriesDocument27 pagesSystematized Literature Review On Financial Inclusion and Exclusion in Developed CountriesRjendra LamsalNo ratings yet
- Calibrating an Analytical BalanceDocument11 pagesCalibrating an Analytical Balancethandeka ncubeNo ratings yet
- CHAPTER 12B Simulation Monte Carlo MethodDocument24 pagesCHAPTER 12B Simulation Monte Carlo MethodmulunehNo ratings yet
- Module-4 COMPLEX DIFFERENTIATION PDFDocument40 pagesModule-4 COMPLEX DIFFERENTIATION PDFPreetham N KumarNo ratings yet
- A Numerical Study of Steklov Eigenvalue Problem Via Conformal MappingDocument23 pagesA Numerical Study of Steklov Eigenvalue Problem Via Conformal MappingGonzalo RiveraNo ratings yet
- Basic Theory of Fractional Differential EquationsDocument6 pagesBasic Theory of Fractional Differential EquationsMehboob AlamNo ratings yet
- Presentation Analysis and Interpretation of Data in Research Paper SampleDocument5 pagesPresentation Analysis and Interpretation of Data in Research Paper SamplegvzcrpymNo ratings yet
- ECON 440/640 Problem Set 4 AnswersDocument5 pagesECON 440/640 Problem Set 4 AnswersBharavi KothapalliNo ratings yet
- To Tehths of Sin Table 4.10: Elementary TranscendentalDocument9 pagesTo Tehths of Sin Table 4.10: Elementary TranscendentalguissadoNo ratings yet
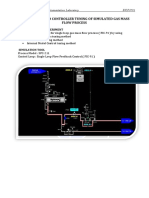
- Experiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessDocument6 pagesExperiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessPMNo ratings yet
- Chapter 17 - Sampling and Estimation: Solutions To Exercise 17ADocument14 pagesChapter 17 - Sampling and Estimation: Solutions To Exercise 17AAnonymous 69No ratings yet