You might also like
- Control of Indution Motor DrviesDocument44 pagesControl of Indution Motor DrviesraviNo ratings yet
- Stator SideDocument16 pagesStator SideParameswara RaoNo ratings yet
- Stator SideDocument16 pagesStator SideParameswara RaoNo ratings yet
- Stator SideDocument16 pagesStator SideParameswara RaoNo ratings yet
- Stator SideDocument16 pagesStator SideParameswara RaoNo ratings yet
- Stator SideDocument16 pagesStator SideParameswara RaoNo ratings yet
- Unit 3 PDFDocument45 pagesUnit 3 PDFGlenn Paul PaceteNo ratings yet
- Unit I Electro Statics - I Co-Ordinate Systems 1. AttentionDocument38 pagesUnit I Electro Statics - I Co-Ordinate Systems 1. AttentionraviNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Led TV Vartical Line PDFDocument9 pagesLed TV Vartical Line PDFHamedKoneNo ratings yet
- Change Notes For ILC 1X1 Inline ControllersDocument4 pagesChange Notes For ILC 1X1 Inline ControllersZH HamzaNo ratings yet
- Interference: Ece/Liet C410 CMC Notes Sudheer Asst Prof ECE DeptDocument30 pagesInterference: Ece/Liet C410 CMC Notes Sudheer Asst Prof ECE DeptJeevan Sai MaddiNo ratings yet
- Storage DevicesDocument25 pagesStorage DevicesBerlin AlcaydeNo ratings yet
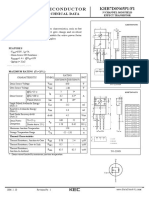
- Semiconductor KHB7D0N65P1/F1: Technical DataDocument7 pagesSemiconductor KHB7D0N65P1/F1: Technical DataDaniel DominguezNo ratings yet
- RICOH SC 672-11Document21 pagesRICOH SC 672-11EdwinDazaNo ratings yet
- Check Your English Vocabulary For ITDocument81 pagesCheck Your English Vocabulary For ITTatyana PoluninaNo ratings yet
- DriverEasy PCInfoDocument3 pagesDriverEasy PCInfoBrunoNo ratings yet
- Nokia M2M Platform Server Application: Programming GuideDocument32 pagesNokia M2M Platform Server Application: Programming GuideEug. Sam.No ratings yet
- Avionics PA Design With Cree's CGHV27030S Amplifier: Eric BonelliDocument51 pagesAvionics PA Design With Cree's CGHV27030S Amplifier: Eric BonelliahsoopkNo ratings yet
- PowerMax and VMAX All Flash - Unisphere Alert 'Back-End Metadata Usage' Value Exceeded Threshold. - Dell USDocument3 pagesPowerMax and VMAX All Flash - Unisphere Alert 'Back-End Metadata Usage' Value Exceeded Threshold. - Dell USPriyank RajNo ratings yet
- Unit-I SSOS NotesDocument61 pagesUnit-I SSOS NotesMANI KANDANNo ratings yet
- Spyglass Lint: Early Design Analysis For Logic DesignersDocument4 pagesSpyglass Lint: Early Design Analysis For Logic DesignersChinavenkateswararao GNo ratings yet
- Affordable, Widescreen Performance: 22" Widescreen LCD Monitor Va SeriesDocument2 pagesAffordable, Widescreen Performance: 22" Widescreen LCD Monitor Va SeriesRumen StoychevNo ratings yet
- Sevick, Jerry - Understanding, Building, and Using Baluns and Ununs - Theory and Practical Designs For The Experimenter (2003, CQ Communications)Document130 pagesSevick, Jerry - Understanding, Building, and Using Baluns and Ununs - Theory and Practical Designs For The Experimenter (2003, CQ Communications)Ramani Swarna100% (4)
- Diode Resistance & Diode Equivalent CircuitsDocument42 pagesDiode Resistance & Diode Equivalent Circuitsgirishkumardarisi254No ratings yet
- Monitor: Part Number Part Name Technical Description QtyDocument1 pageMonitor: Part Number Part Name Technical Description Qtynucleus biomedNo ratings yet
- Hands On Vhost-User: A Warm Welcome To DPDK: 17-22 MinutesDocument13 pagesHands On Vhost-User: A Warm Welcome To DPDK: 17-22 Minutessunnyb77No ratings yet
- Bistos Patient MonitorDocument5 pagesBistos Patient MonitorKarl MamarilNo ratings yet
- Analog Communication 1Document33 pagesAnalog Communication 1SunithaNo ratings yet
- PS252C1Document10 pagesPS252C1Rosa María AmoneNo ratings yet
- 8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega48/V Atmega88/V Atmega168/V PreliminaryDocument33 pages8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega48/V Atmega88/V Atmega168/V PreliminaryRubén Pérez ArmasNo ratings yet
- E-Commerce 2017 Business. Technology. Society.: 13 EditionDocument46 pagesE-Commerce 2017 Business. Technology. Society.: 13 Editiontekendra nath100% (1)
- DC Circuit Lecture-01 by Himu Academy PDFDocument31 pagesDC Circuit Lecture-01 by Himu Academy PDFKhadija MehjebinNo ratings yet
- To Construct A Half-Wave Rectifier Circuit and To Check Its Output Waveform On Oscilloscope Theory Half-Wave RectifierDocument4 pagesTo Construct A Half-Wave Rectifier Circuit and To Check Its Output Waveform On Oscilloscope Theory Half-Wave RectifierartistryrivalNo ratings yet
- BSC Card Overview and FunctionDocument35 pagesBSC Card Overview and Functionkamal100% (1)
- Nvidia Tesla P40: Gpu AcceleratorDocument2 pagesNvidia Tesla P40: Gpu AcceleratorCarlos FreitasNo ratings yet
- ACE Bisector Antenna Connectivity Diagram 200804aDocument12 pagesACE Bisector Antenna Connectivity Diagram 200804aTumpal Pasaribu100% (2)
- Microchip PolarFire FPGA and PolarFire SoC FPGA Clocking Resources User Guide VBDocument68 pagesMicrochip PolarFire FPGA and PolarFire SoC FPGA Clocking Resources User Guide VBSi Thu TunNo ratings yet
- Teknowarecom-Ic - Input - Module - tst8801Document4 pagesTeknowarecom-Ic - Input - Module - tst8801Elektrikal InhinyeroNo ratings yet