You might also like
- TPM Preventive Maintenance ReportDocument27 pagesTPM Preventive Maintenance ReportSreenath Hacko100% (2)
- Winone Elevator Connection DiagramDocument40 pagesWinone Elevator Connection DiagramMuhammad Rashid75% (4)
- Total Productive Maintenance For Organisational EffectivenessFrom EverandTotal Productive Maintenance For Organisational EffectivenessRating: 4 out of 5 stars4/5 (4)
- High Pressure Homogenizer ManualDocument5 pagesHigh Pressure Homogenizer ManualAhmed AlakhliNo ratings yet
- Pokemon Black 2 and White 2 USA Action Replay Official Code ListDocument12 pagesPokemon Black 2 and White 2 USA Action Replay Official Code ListW A R R E N100% (1)
- Rubber Examination Gloves: Standard Specification ForDocument5 pagesRubber Examination Gloves: Standard Specification ForNguyễn Bảo TrâmNo ratings yet
- Optimal Maintenance and Replacement Decisions with Imperfect Actions and Warranty ContractsDocument8 pagesOptimal Maintenance and Replacement Decisions with Imperfect Actions and Warranty ContractsfellipeNo ratings yet
- A - Proactive - Condition - Based - Maintenance Strategy With Both Perfect and Imperfect Maintenance ActionsDocument26 pagesA - Proactive - Condition - Based - Maintenance Strategy With Both Perfect and Imperfect Maintenance ActionsSimon van BentenNo ratings yet
- Maintenance Policy Optimization-Literature Review and Direction - 2015 PDFDocument21 pagesMaintenance Policy Optimization-Literature Review and Direction - 2015 PDFCristian GarciaNo ratings yet
- Cost Benefits of Postponing Time-Based Maintenance Under LifetimeDocument7 pagesCost Benefits of Postponing Time-Based Maintenance Under LifetimeM Luthfi Al MudzakiNo ratings yet
- Reliability Engineering and System Safety: Joeri Poppe, Rob J.I. Basten, Robert N. Boute, Marc R. LambrechtDocument12 pagesReliability Engineering and System Safety: Joeri Poppe, Rob J.I. Basten, Robert N. Boute, Marc R. LambrechtNourhanne AhmadNo ratings yet
- IJTech_IE-3579_Overall-Equipment-Effectiveness-Evaluation-of-MainDocument12 pagesIJTech_IE-3579_Overall-Equipment-Effectiveness-Evaluation-of-Maintrip3milihNo ratings yet
- A Multi-Criterion Decision-Making On Preventive MaintenanceDocument9 pagesA Multi-Criterion Decision-Making On Preventive Maintenanceieom2012No ratings yet
- A Fuzzy TOPSIS-Based Approach To Maintenance Strategy Selection: A Case StudyDocument8 pagesA Fuzzy TOPSIS-Based Approach To Maintenance Strategy Selection: A Case StudyteddiyfentawNo ratings yet
- Fuzzy AHP Method for Selecting Optimum Maintenance StrategiesDocument13 pagesFuzzy AHP Method for Selecting Optimum Maintenance StrategiesMary Jane DuranNo ratings yet
- Measuring Maintenance Performance) in Search For A Maintenance Productivity IndexDocument12 pagesMeasuring Maintenance Performance) in Search For A Maintenance Productivity Indexlospin1No ratings yet
- Ranking Maintenance Sustainability Strategies Using PROMETHEE and Fuzzy EntropyDocument18 pagesRanking Maintenance Sustainability Strategies Using PROMETHEE and Fuzzy EntropyCarlos Augusto Sánchez RondónNo ratings yet
- Zafar HameedDocument15 pagesZafar HameedfredyNo ratings yet
- Publicacion de MttoDocument6 pagesPublicacion de MttoRaul CastroNo ratings yet
- Definition of LCCDocument13 pagesDefinition of LCCAnis_Zack_No ratings yet
- Reliability Engineering and System Safety: Enrico Zio, Michele CompareDocument13 pagesReliability Engineering and System Safety: Enrico Zio, Michele Compareuamiranda3518No ratings yet
- Preventive MaintenanceDocument12 pagesPreventive MaintenanceNguyen Xuan TungNo ratings yet
- Computers & Industrial Engineering: Hao Peng, Qiushi ZhuDocument12 pagesComputers & Industrial Engineering: Hao Peng, Qiushi Zhuliliana figueroaNo ratings yet
- Spare PartsDocument22 pagesSpare PartsNaveed RabbaniNo ratings yet
- Chapter 1 Introducing Best Practices in M&RDocument4 pagesChapter 1 Introducing Best Practices in M&RSumayyia QamarNo ratings yet
- Operation Research Assignment Set- 1: Discussing the usefulness of OR techniques in decision making and role of computersDocument7 pagesOperation Research Assignment Set- 1: Discussing the usefulness of OR techniques in decision making and role of computersHariharan GanapathyNo ratings yet
- Microsoft PowerPoint - 5المحاضرة الثانية الجزء الثالث IE 782 تسجيلDocument16 pagesMicrosoft PowerPoint - 5المحاضرة الثانية الجزء الثالث IE 782 تسجيلMohamed GhuneimNo ratings yet
- PLANT MAINTENANCE KEY TO PROFITDocument8 pagesPLANT MAINTENANCE KEY TO PROFITangphooiNo ratings yet
- Applsci 13 02021 v2Document17 pagesApplsci 13 02021 v2Simon van BentenNo ratings yet
- Nayatel RPDocument20 pagesNayatel RPMansoor ShahabNo ratings yet
- Handout Group 6Document5 pagesHandout Group 6api-3831834No ratings yet
- Artículo 1Document18 pagesArtículo 1Rosaly PerezNo ratings yet
- Optimal Preventive Maintenance PolicyDocument10 pagesOptimal Preventive Maintenance PolicyIgor CanabarroNo ratings yet
- Plant Maintenance StrategyDocument8 pagesPlant Maintenance Strategymirdza94No ratings yet
- Elements of CostingDocument171 pagesElements of Costingiisjaffer100% (1)
- A Dynamic - Predict, Then OptimizeŽ Preventive Maintenance Approach Using Operational Intervention Data - Elsevier Enhanced Reader PDFDocument22 pagesA Dynamic - Predict, Then OptimizeŽ Preventive Maintenance Approach Using Operational Intervention Data - Elsevier Enhanced Reader PDFJhonny LeonNo ratings yet
- 10_MarquezDocument18 pages10_MarquezfredyNo ratings yet
- For A Fit and Healthy PlantDocument10 pagesFor A Fit and Healthy PlantSatyabrata RoutNo ratings yet
- Quantifying The Effects of Production Maintenance Decisions Using Discrete Event SimulationDocument9 pagesQuantifying The Effects of Production Maintenance Decisions Using Discrete Event SimulationDavid NyanguNo ratings yet
- Literature Review On Preventive MaintenanceDocument5 pagesLiterature Review On Preventive Maintenanceafmzndvyddcoio100% (1)
- Yeh, R. H., & Chang, W. L. 2009 - Optimal PM Policy For Leased Equipment Using Failure Rate Reduction.Document6 pagesYeh, R. H., & Chang, W. L. 2009 - Optimal PM Policy For Leased Equipment Using Failure Rate Reduction.Yoga AuliaNo ratings yet
- Planned Maintenance Vs Unplanned Maintenance and FDocument10 pagesPlanned Maintenance Vs Unplanned Maintenance and FNo NameNo ratings yet
- Journal Review: On Sustainable Approaches To Maintenance Practice in The Apparel IndustryDocument6 pagesJournal Review: On Sustainable Approaches To Maintenance Practice in The Apparel IndustryanishaNo ratings yet
- Advanced Maintenance TechniquesDocument8 pagesAdvanced Maintenance TechniquesyellowishmustardNo ratings yet
- Introduction To orDocument51 pagesIntroduction To orGurinder SinghNo ratings yet
- Maintenance Concept Development:a Case StudyDocument11 pagesMaintenance Concept Development:a Case StudyMassimo ParcianelloNo ratings yet
- Thesis On Maintenance PracticesDocument5 pagesThesis On Maintenance PracticesCollegePapersWritingServiceWashington100% (2)
- Reliability-Centered Predictive Maintenance Scheduling For A Continuously Monitored System Subject To DegradationDocument5 pagesReliability-Centered Predictive Maintenance Scheduling For A Continuously Monitored System Subject To DegradationjudarangocaNo ratings yet
- Replacement Analysis A Vital Tool For Decision-Making in BusinessDocument2 pagesReplacement Analysis A Vital Tool For Decision-Making in BusinessSuhailShaikhNo ratings yet
- Maintenance Management AssignmentDocument9 pagesMaintenance Management AssignmentRajni KumariNo ratings yet
- Or MbaDocument203 pagesOr MbaPuja YadavNo ratings yet
- DMDS-246: Step 1: Laying The Ground WorkDocument5 pagesDMDS-246: Step 1: Laying The Ground Worksailesh chaudharyNo ratings yet
- Absorption Cost SystemsDocument6 pagesAbsorption Cost SystemsMona AlkhatibNo ratings yet
- Gestión de MttoDocument23 pagesGestión de MttoDaniel VilcapomaNo ratings yet
- Trends in risk-based substation asset managementDocument8 pagesTrends in risk-based substation asset managementintiw_23No ratings yet
- Seven Steps To Maintenance StrategyDocument13 pagesSeven Steps To Maintenance StrategyAbderrahim AbarayNo ratings yet
- A Practical Approach To Tolerance AllocationDocument8 pagesA Practical Approach To Tolerance AllocationAbdennasser RahibiNo ratings yet
- PeriodicMaintenancePolicies v8 FinalDocument22 pagesPeriodicMaintenancePolicies v8 Finalbadside badside100% (1)
- Suministro de Repuestos Basado en CondicionDocument9 pagesSuministro de Repuestos Basado en CondicionDaniel Carvajal TinocoNo ratings yet
- Master Budget Guide for Financial PlanningDocument40 pagesMaster Budget Guide for Financial PlanningAzizul AviNo ratings yet
- Project Optimization of Plant StoppagesDocument8 pagesProject Optimization of Plant Stoppagescrystian odar olazabalNo ratings yet
- The Advantage of This Model Is It Easiest To Use and It Is SimpleDocument9 pagesThe Advantage of This Model Is It Easiest To Use and It Is SimpleRazeen RamzyNo ratings yet
- Cost Estimation in Agile Software Development: Utilizing Functional Size Measurement MethodsFrom EverandCost Estimation in Agile Software Development: Utilizing Functional Size Measurement MethodsNo ratings yet
- History of GreaseDocument12 pagesHistory of GreaseAhmed AlakhliNo ratings yet
- SolvertDocument1 pageSolvertAbul QasimNo ratings yet
- Object and Operation Supported MaintenanDocument15 pagesObject and Operation Supported MaintenanAhmed AlakhliNo ratings yet
- Proceedingsofthe6thICME2005 PaperID AM 28 PDFDocument8 pagesProceedingsofthe6thICME2005 PaperID AM 28 PDFAhmed AlakhliNo ratings yet
- Proceedingsofthe6thICME2005 PaperID AM 28Document8 pagesProceedingsofthe6thICME2005 PaperID AM 28Ahmed AlakhliNo ratings yet
- PM 372 Roto Packer RVTDocument20 pagesPM 372 Roto Packer RVTLiuel GirmaNo ratings yet
- Transformer Fire Protection: Facilities Instructions, Standards, and Techniques Volume 3-32Document43 pagesTransformer Fire Protection: Facilities Instructions, Standards, and Techniques Volume 3-32GualaNo ratings yet
- Equipment / Machinery Checklist: BlankDocument3 pagesEquipment / Machinery Checklist: Blankyared admassuNo ratings yet
- Cement Plant MachineryDocument5 pagesCement Plant MachineryAhmed AlakhliNo ratings yet
- Reliability-Based Optimization of Mainte PDFDocument17 pagesReliability-Based Optimization of Mainte PDFAhmed AlakhliNo ratings yet
- Generate Multimedia Explanations for Equipment MaintenanceDocument17 pagesGenerate Multimedia Explanations for Equipment MaintenanceAhmed AlakhliNo ratings yet
- Batch Production and Preventive Maintena PDFDocument12 pagesBatch Production and Preventive Maintena PDFAhmed AlakhliNo ratings yet
- Irjet - Maintenance and Reliability Strat PDFDocument3 pagesIrjet - Maintenance and Reliability Strat PDFAhmed AlakhliNo ratings yet
- Membership Committee Checklist GuideDocument1 pageMembership Committee Checklist GuideAhmed AlakhliNo ratings yet
- Ludeca - A Practical Guide To Shaft Alignment PDFDocument63 pagesLudeca - A Practical Guide To Shaft Alignment PDFdckristantoNo ratings yet
- Course Policy Che 406 S2020Document2 pagesCourse Policy Che 406 S2020Ahmad IjazNo ratings yet
- Job Evaluation & Grading - PPT Hrm2Document9 pagesJob Evaluation & Grading - PPT Hrm2Monica ReyesNo ratings yet
- Make a Better World: Understanding Listening StrategiesDocument24 pagesMake a Better World: Understanding Listening StrategiesMary Ysalina100% (3)
- 04-68350A Manual CCN DM01-DI01 PDFDocument47 pages04-68350A Manual CCN DM01-DI01 PDFtaha50% (2)
- What I Have Learned: MODULE 2: Stand On Issues Supported by Factual EvidencesDocument3 pagesWhat I Have Learned: MODULE 2: Stand On Issues Supported by Factual EvidencesJc Tan GallanoNo ratings yet
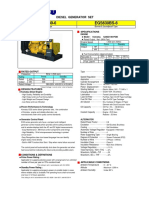
- Egs630-6 Komatsu GensetDocument2 pagesEgs630-6 Komatsu GensetimamfadiliNo ratings yet
- Nelson 2010 StructuralDocument51 pagesNelson 2010 StructuralGustavo Mateo100% (1)
- 1020 Aseguramiento de Calidad GeneralDocument10 pages1020 Aseguramiento de Calidad GeneralJennifer Tatiana DíazNo ratings yet
- Getachew Final EditedDocument76 pagesGetachew Final EditedDesalegn DgaNo ratings yet
- Introduction To PFADocument7 pagesIntroduction To PFACHRISTINE KYLE CIPRIANONo ratings yet
- Cablemaster RLC - ManualDocument8 pagesCablemaster RLC - ManualGlendinning Products, LLC.No ratings yet
- Linear Transformations and Matrices ExplainedDocument40 pagesLinear Transformations and Matrices ExplainedeshbliNo ratings yet
- ROUTE MAPDocument5 pagesROUTE MAPNishant PathakNo ratings yet
- Filipino Traditions and CultureDocument2 pagesFilipino Traditions and CultureSagbot Nga layaNo ratings yet
- HYDRAULICSDocument15 pagesHYDRAULICSHoney ApariceNo ratings yet
- Manufacturing Process AssignmentDocument5 pagesManufacturing Process AssignmentPalani SuntharajanNo ratings yet
- Nursing ResumeDocument2 pagesNursing Resumeapi-655558844No ratings yet
- SPPP PDFDocument17 pagesSPPP PDFArnold DominguezNo ratings yet
- Decode Cryptic MessagesDocument26 pagesDecode Cryptic MessagesJerwyn Marie CayasNo ratings yet
- Shaker SK L180 SDocument1 pageShaker SK L180 SUPT LABKESDA KAB PADANG PARIAMANNo ratings yet
- Data Privacy Notice TemplateDocument1 pageData Privacy Notice TemplateangeloNo ratings yet
- Flange Tables PDFDocument6 pagesFlange Tables PDFTomhang No HangNo ratings yet
- NAVIGATION COURSE DESCRIPTIONDocument174 pagesNAVIGATION COURSE DESCRIPTIONKayle Christian TaroyNo ratings yet
- Modern Steel Construction March-2022Document76 pagesModern Steel Construction March-2022jackcan501No ratings yet
- Gynecological Examination Table: Order Number: 11.1047Document1 pageGynecological Examination Table: Order Number: 11.1047yosra MedicalNo ratings yet
- Quarter 3-LP-Eng10-Lesson3Document4 pagesQuarter 3-LP-Eng10-Lesson3Cynthia LuayNo ratings yet
- Conditions For Effective Innovation On The MacroDocument3 pagesConditions For Effective Innovation On The MacroWinesha U. Smith100% (2)