You might also like
- Java Theory and Practice:: Stick A Fork in It, Part 1Document8 pagesJava Theory and Practice:: Stick A Fork in It, Part 1Dipesh GuptaNo ratings yet
- Playing With Threads: Tausief ShaikhDocument21 pagesPlaying With Threads: Tausief ShaikhPrabhakar PrabhuNo ratings yet
- Picothreads: Lightweight Threads in Java: 1.1 Event-Based Programming vs. Thread ProgrammingDocument8 pagesPicothreads: Lightweight Threads in Java: 1.1 Event-Based Programming vs. Thread Programminganon-679511No ratings yet
- Multithreadedjavascript PreviewDocument5 pagesMultithreadedjavascript Previewqcrw5No ratings yet
- Tausief Shaikh: (Senior Server Developer)Document21 pagesTausief Shaikh: (Senior Server Developer)optimistic_harishNo ratings yet
- JAWS: A Java Work Stealing Scheduler Over A Network of WorkstationsDocument14 pagesJAWS: A Java Work Stealing Scheduler Over A Network of WorkstationsDaniel IwanNo ratings yet
- C# Multithreaded and Parallel Programming Sample ChapterDocument36 pagesC# Multithreaded and Parallel Programming Sample ChapterPackt PublishingNo ratings yet
- Concurrent and Real-Time Programming in JavaDocument1,030 pagesConcurrent and Real-Time Programming in JavaRavi EdirisingheNo ratings yet
- R2DBC Revealed: Reactive Relational Database Connectivity for Java and JVM ProgrammersFrom EverandR2DBC Revealed: Reactive Relational Database Connectivity for Java and JVM ProgrammersNo ratings yet
- Clustering The Java Virtual Machine Using Aspect-Oriented ProgrammingDocument8 pagesClustering The Java Virtual Machine Using Aspect-Oriented ProgrammingSharath VenkiNo ratings yet
- Supplimentary Material IDocument24 pagesSupplimentary Material ILets clear Jee mathsNo ratings yet
- Multi ThreadingDocument128 pagesMulti ThreadingbabithNo ratings yet
- Searching DeadlocksDocument12 pagesSearching DeadlocksFernandoMaranhãoNo ratings yet
- Dependency-Based Automatic Parallelization of Java ApplicationsDocument13 pagesDependency-Based Automatic Parallelization of Java ApplicationsGeorge-Alexandru IoanaNo ratings yet
- Mastering Concurrency Programming With Java 8 - Sample ChapterDocument37 pagesMastering Concurrency Programming With Java 8 - Sample ChapterPackt Publishing33% (3)
- Patterns of Parallel Programming in C#Document118 pagesPatterns of Parallel Programming in C#Nghĩa NguyễnNo ratings yet
- Patterns of Parallel ProgrammingDocument117 pagesPatterns of Parallel Programmingjayanthan85No ratings yet
- Java Thesis PDFDocument6 pagesJava Thesis PDFPayToDoPaperSingapore100% (2)
- Introduction To Java Threads: Section 1. About This TutorialDocument27 pagesIntroduction To Java Threads: Section 1. About This TutorialpmvijussNo ratings yet
- Java Threads TutorialDocument30 pagesJava Threads TutorialkyashwanthNo ratings yet
- Original Java WhitepaperDocument10 pagesOriginal Java WhitepaperPratik SaiNo ratings yet
- ThreadsDocument108 pagesThreadswilder delgadoNo ratings yet
- Java Threads TutorialDocument30 pagesJava Threads TutorialratheeshonwebNo ratings yet
- Introduction To Java ThreadsDocument30 pagesIntroduction To Java ThreadsVishal GoelNo ratings yet
- JAVA: Java Programming for beginners teaching you basic to advanced JAVA programming skills!From EverandJAVA: Java Programming for beginners teaching you basic to advanced JAVA programming skills!No ratings yet
- Parallel Processing: Types of ParallelismDocument7 pagesParallel Processing: Types of ParallelismRupesh MishraNo ratings yet
- Comparative Analysis of Server Performance Based On Network & Web ApplicationsDocument4 pagesComparative Analysis of Server Performance Based On Network & Web ApplicationsZia Ul IslamNo ratings yet
- Dca6105 - Computer ArchitectureDocument6 pagesDca6105 - Computer Architectureanshika mahajanNo ratings yet
- Java ConcurrencyDocument24 pagesJava ConcurrencyKarthik BaskaranNo ratings yet
- The Effect of Game-Theoretic Information On Software EngineeringDocument5 pagesThe Effect of Game-Theoretic Information On Software EngineeringLKNo ratings yet
- A Generic Parallel Collection Framework: Aleksandar Prokopec, Tiark Rompf, Phil Bagwell, Martin OderskyDocument10 pagesA Generic Parallel Collection Framework: Aleksandar Prokopec, Tiark Rompf, Phil Bagwell, Martin OderskyNicolas MolinariNo ratings yet
- Parallelism Joins Concurrency For Multicore Embedded ComputingDocument6 pagesParallelism Joins Concurrency For Multicore Embedded ComputingRaveendra Reddy PadalaNo ratings yet
- J Threads PDFDocument24 pagesJ Threads PDFcosNo ratings yet
- Chapter 1Document25 pagesChapter 1chinmayNo ratings yet
- A Java Task Pool Framework Providing Fault-Tolerant Global Load BalancingDocument30 pagesA Java Task Pool Framework Providing Fault-Tolerant Global Load BalancingAlexanderNo ratings yet
- Java Multi-Threading Evolution and TopicsDocument45 pagesJava Multi-Threading Evolution and Topicsarchana gangadharNo ratings yet
- Scimakelatex 3043 NoneDocument6 pagesScimakelatex 3043 NonefsofNo ratings yet
- Lakos Large Scale C++Document5 pagesLakos Large Scale C++api-1752250No ratings yet
- Interposable TechnologyDocument4 pagesInterposable TechnologyRasendranKirushanNo ratings yet
- Integrating Java and Matlab Components Into The Same Parallel and Distributed Application Using JavaportsDocument10 pagesIntegrating Java and Matlab Components Into The Same Parallel and Distributed Application Using Javaportsjayaram_scaj3921No ratings yet
- Research Paper On JVMDocument4 pagesResearch Paper On JVMvmehykrif100% (1)
- FoundationsDocument29 pagesFoundationsনিবিড় অভ্রNo ratings yet
- Disruptor-1 0Document11 pagesDisruptor-1 0ankitkhandelwal6No ratings yet
- Advanced Programming Java-H-U3Document15 pagesAdvanced Programming Java-H-U3ኢየሩሳሌም ገብረ ክርስቶስNo ratings yet
- Evan Cabral Methods PaperDocument6 pagesEvan Cabral Methods PaperJohnNo ratings yet
- Reactive Streams PDFDocument4 pagesReactive Streams PDFJose Miguel Romero SevillaNo ratings yet
- Deconstructing Fiber-Optic Cables: Ok and WhatDocument3 pagesDeconstructing Fiber-Optic Cables: Ok and WhatOne TWoNo ratings yet
- Parallel Framework, The NeedDocument6 pagesParallel Framework, The Needaravinda_kumarNo ratings yet
- Basic Database Performance Tuning - Developer's Perspective: Michal KwiatekDocument6 pagesBasic Database Performance Tuning - Developer's Perspective: Michal KwiatekMohd YasinNo ratings yet
- Unit 4 - Cloud Programming ModelsDocument21 pagesUnit 4 - Cloud Programming ModelsMag CreationNo ratings yet
- Node.js, JavaScript, API: Interview Questions and AnswersFrom EverandNode.js, JavaScript, API: Interview Questions and AnswersRating: 5 out of 5 stars5/5 (1)
- JVM InternalsDocument55 pagesJVM InternalsAmol ChikhalkarNo ratings yet
- ConcurrentHashMap - Brian GoetzDocument9 pagesConcurrentHashMap - Brian GoetzAmol ChikhalkarNo ratings yet
- Ppfas Sip FormDocument2 pagesPpfas Sip FormAmol ChikhalkarNo ratings yet
- Understanding The Chart PatternDocument29 pagesUnderstanding The Chart PatternAmol ChikhalkarNo ratings yet
- Arduinobasedsmartirrigationsystemusingiot1 JournalsDocument6 pagesArduinobasedsmartirrigationsystemusingiot1 JournalsAnkitha G NayakaNo ratings yet
- Qradar Support 101: Wincollect TroubleshootingDocument38 pagesQradar Support 101: Wincollect TroubleshootingSarwat TauqeerNo ratings yet
- Xset 1Document6 pagesXset 1Lukas ButkusNo ratings yet
- Matlab Exercises 1Document8 pagesMatlab Exercises 1Hajra AamirNo ratings yet
- Lab 10Document127 pagesLab 10Elena TinaNo ratings yet
- HTMLDocument16 pagesHTMLVaibhav PawarNo ratings yet
- Pronto Release - Notes - 670 - 2Document87 pagesPronto Release - Notes - 670 - 2DavidNo ratings yet
- Angielski W IT 9788367663212 Rozdzial Do PobraniaDocument20 pagesAngielski W IT 9788367663212 Rozdzial Do PobraniaPokey Poke100% (1)
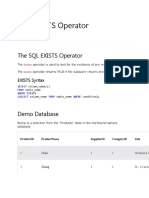
- The SQL EXISTS OperatorDocument5 pagesThe SQL EXISTS OperatorBharathNo ratings yet
- Kris Gethin's 8-Week Hardcore Video TrainerDocument7 pagesKris Gethin's 8-Week Hardcore Video TrainerRayNo ratings yet
- Full DC Inverter CMV System Outdoor Unit: GD Chigo Heating & Ventilation Equipment Co., LTDDocument43 pagesFull DC Inverter CMV System Outdoor Unit: GD Chigo Heating & Ventilation Equipment Co., LTDosama shamout100% (2)
- Assignment 2 With ProgramDocument8 pagesAssignment 2 With ProgramPalash SarowareNo ratings yet
- Relatório de Preços de Produtos: Primeiro Nível: SelecioneDocument3 pagesRelatório de Preços de Produtos: Primeiro Nível: SelecioneVitor ManoelNo ratings yet
- Java™ How To Program, 10/e Late Objects Version: ReservedDocument98 pagesJava™ How To Program, 10/e Late Objects Version: ReservedReema techcampusNo ratings yet
- Java Ebook by Durga SirDocument477 pagesJava Ebook by Durga SirPrabhakar Pathak67% (3)
- Arcgis Pro: General Training GuideDocument13 pagesArcgis Pro: General Training Guidehiwot ytayewNo ratings yet
- 04 Python - FunctionsDocument24 pages04 Python - FunctionsprashantdpatkeNo ratings yet
- MIS Report On Online BankingDocument31 pagesMIS Report On Online BankingMurtaza MoizNo ratings yet
- Chapter 3 Pythagoras Theorem and TrigonometryDocument72 pagesChapter 3 Pythagoras Theorem and TrigonometryUmair NawazNo ratings yet
- F5 Customer Demo: BIG-IP AFM - Use Global RulesDocument9 pagesF5 Customer Demo: BIG-IP AFM - Use Global RulesAries Raf OndisNo ratings yet
- Amber LED Codes Accessing The Service Mode MenuDocument2 pagesAmber LED Codes Accessing The Service Mode MenuNeli RusevaNo ratings yet
- PB560 Source Code ChecksumsDocument28 pagesPB560 Source Code Checksumsy lNo ratings yet
- BRKSEC 3432 DesignDocument230 pagesBRKSEC 3432 DesignSEMİH100% (1)
- Practical 7 PDFDocument8 pagesPractical 7 PDFAjinkya PatilNo ratings yet
- Requisition Form 03.11.22Document1 pageRequisition Form 03.11.22Girish BariaNo ratings yet
- HCT 108 Handout5Document14 pagesHCT 108 Handout5Gerald KapinguraNo ratings yet
- Designing A Case Life CycleDocument11 pagesDesigning A Case Life CycleswarnanjaliNo ratings yet
- PowerFlex Rack Administration - Instructor GuideDocument241 pagesPowerFlex Rack Administration - Instructor GuideGreivin ArguedasNo ratings yet
- Elizardo PerzDocument79 pagesElizardo PerzRODRINo ratings yet
- Midterm Project: EEDG 6306 - Application Specific Integrated Circuit DesignDocument6 pagesMidterm Project: EEDG 6306 - Application Specific Integrated Circuit Designafrica threeNo ratings yet