You might also like
- Three-Wire Serial Eeprom: FeaturesDocument21 pagesThree-Wire Serial Eeprom: FeaturesАлександр СаральповNo ratings yet
- Flight Controller 「なぜ」 「Naze32」: Mini Fun FlyDocument12 pagesFlight Controller 「なぜ」 「Naze32」: Mini Fun FlyVojimirNo ratings yet
- MCR2 MiniChallenge 4Document17 pagesMCR2 MiniChallenge 4Carlos SolanoNo ratings yet
- Infosheet Chip45boot2Document6 pagesInfosheet Chip45boot2sigit raharjoNo ratings yet
- Manual Programacao Argox As 8000Document34 pagesManual Programacao Argox As 8000satishNo ratings yet
- TC4467/TC4468/TC4469: Logic-Input CMOS Quad DriversDocument22 pagesTC4467/TC4468/TC4469: Logic-Input CMOS Quad DriversFatih YILDIRIMNo ratings yet
- Getting Started PIC16F88 KitDocument7 pagesGetting Started PIC16F88 KitOkta SporNo ratings yet
- CD 74 HC 4053Document49 pagesCD 74 HC 4053tecnicogato27No ratings yet
- cd74hc4051 PDFDocument44 pagescd74hc4051 PDFVfvvNo ratings yet
- Adt FocusDocument244 pagesAdt Focusjustin tuckerNo ratings yet
- 01Document8 pages01Nacer MezghicheNo ratings yet
- Common OCD Pinouts: Signals Specified by The ManufacturerDocument4 pagesCommon OCD Pinouts: Signals Specified by The ManufacturerMarcelo BaptistaNo ratings yet
- Hardware Hacking 101: Bsides Munich 2019 Radek Domanski, Johannes WagnerDocument38 pagesHardware Hacking 101: Bsides Munich 2019 Radek Domanski, Johannes WagnerSadry Fievet100% (1)
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDocument13 pagesKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67No ratings yet
- Microsquirt-Module Developers Guide-3.4Document17 pagesMicrosquirt-Module Developers Guide-3.4Pedro Felipe Alves de OliveiraNo ratings yet
- PIC16C7X: 8-Bit CMOS Microcontrollers With A/D ConverterDocument312 pagesPIC16C7X: 8-Bit CMOS Microcontrollers With A/D Converterraj131313No ratings yet
- 4Ch IR Sensor PDFDocument7 pages4Ch IR Sensor PDFDuzzys100% (1)
- Micro-Controllers & Robotics: Robotics Club It-BhuDocument85 pagesMicro-Controllers & Robotics: Robotics Club It-BhuElisée NdjabuNo ratings yet
- DatasheetDocument36 pagesDatasheetCelso CastroNo ratings yet
- Turngy 9x ManualDocument7 pagesTurngy 9x Manualتيه تاريق مادوNo ratings yet
- Gress Cutter TheoryDocument15 pagesGress Cutter TheoryKyaw SoeNo ratings yet
- Cpu5a Flyer TechDocument13 pagesCpu5a Flyer TechJean GrimNo ratings yet
- 3 Axis TB6560 3.5A Stepper Motor Driver Board Manual PDFDocument10 pages3 Axis TB6560 3.5A Stepper Motor Driver Board Manual PDFNisar AhmedNo ratings yet
- Mos Integrated Circuit: Data SheetDocument62 pagesMos Integrated Circuit: Data SheetdgdNo ratings yet
- Two-Wire Serial Eeprom: FeaturesDocument19 pagesTwo-Wire Serial Eeprom: Featuresvladimir_p80No ratings yet
- Tmcm-6213 Coe Firmware Manual: Simplified Block DiagramDocument116 pagesTmcm-6213 Coe Firmware Manual: Simplified Block DiagramMorten AndersenNo ratings yet
- Interfacing Zigbee With LPC2148 ARMDocument14 pagesInterfacing Zigbee With LPC2148 ARMgoutham457No ratings yet
- TMC93LC46Document15 pagesTMC93LC46Agustin AndrokaitesNo ratings yet
- AT93CXXDocument15 pagesAT93CXXcallkalaiNo ratings yet
- Two-Wire Serial EEPROM 32K (4096 X 8) 64K (8192 X 8) AT24C32A AT24C64ADocument22 pagesTwo-Wire Serial EEPROM 32K (4096 X 8) 64K (8192 X 8) AT24C32A AT24C64AmedNo ratings yet
- P2 DataSheetDocument4 pagesP2 DataSheetpahia3118No ratings yet
- Pic 18 F 46 K 40Document594 pagesPic 18 F 46 K 40Nelson FreitasNo ratings yet
- SGM6502 8-Input, 6-Output Video Switch Matrix With Output Drivers, Input Clamp, and Bias CircuitryDocument14 pagesSGM6502 8-Input, 6-Output Video Switch Matrix With Output Drivers, Input Clamp, and Bias CircuitryblackhaWKfelNo ratings yet
- CAT93C46B 1-Kb Microwire Serial Eeprom: DescriptionDocument14 pagesCAT93C46B 1-Kb Microwire Serial Eeprom: DescriptionJose Polan VillalobosNo ratings yet
- Ma1110 RS232 Eu enDocument25 pagesMa1110 RS232 Eu enAlan SinuheNo ratings yet
- 3-Wire Serial Eeproms: FeaturesDocument18 pages3-Wire Serial Eeproms: FeaturesAriana ScheiderNo ratings yet
- GY-53-L1X English Use GuideDocument7 pagesGY-53-L1X English Use GuideHeidi LewNo ratings yet
- SIMB-A21 Startup Manual PDFDocument6 pagesSIMB-A21 Startup Manual PDFsisindry chennupatiNo ratings yet
- Datasheet Megatronicsv33Document16 pagesDatasheet Megatronicsv33Andres MesaNo ratings yet
- 8-Bit Shift Register With Output Latches (3-State) : ApplicationsDocument22 pages8-Bit Shift Register With Output Latches (3-State) : ApplicationsAnonymous xVToPcfG6CNo ratings yet
- Dell EMC S4048-ON Switch Release Notes: Document Revision HistoryDocument12 pagesDell EMC S4048-ON Switch Release Notes: Document Revision Historylakis lalakis888No ratings yet
- Dephy DS ActPack41Document7 pagesDephy DS ActPack41sanchitNo ratings yet
- Mr8535 User ManualDocument10 pagesMr8535 User Manualdinda_wandasariNo ratings yet
- Product Selector GuideDocument36 pagesProduct Selector Guidekarthik4096No ratings yet
- I Series CommDocument19 pagesI Series CommYoel OcminNo ratings yet
- AT24C04C AT24C08C I2C Compatible Two Wire Serial EEPROM 4 Kbit 8 Kbit 20006127ADocument46 pagesAT24C04C AT24C08C I2C Compatible Two Wire Serial EEPROM 4 Kbit 8 Kbit 20006127Anicares718No ratings yet
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocument7 pagesSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaNo ratings yet
- 1.3inch LCD Module User Manual enDocument15 pages1.3inch LCD Module User Manual enDeddy ChenNo ratings yet
- PD42-1241 TMCL Firmware Manual Fw1.44 Rev1.01Document107 pagesPD42-1241 TMCL Firmware Manual Fw1.44 Rev1.01Deval PareekNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Transistor Switching and Sequential CircuitsFrom EverandTransistor Switching and Sequential CircuitsRating: 5 out of 5 stars5/5 (1)
- Making PIC Microcontroller Instruments and ControllersFrom EverandMaking PIC Microcontroller Instruments and ControllersNo ratings yet
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- SOUND CARD - Sound Blaster X-Fi SB0679 Rev1.0 PDFDocument5 pagesSOUND CARD - Sound Blaster X-Fi SB0679 Rev1.0 PDFLodewyk KleynhansNo ratings yet
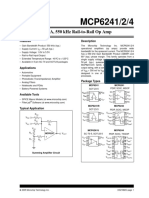
- OpAmp - MCP6241 PDFDocument28 pagesOpAmp - MCP6241 PDFLodewyk KleynhansNo ratings yet
- SOUND CARD - Emagic A 62 en PDFDocument84 pagesSOUND CARD - Emagic A 62 en PDFLodewyk KleynhansNo ratings yet
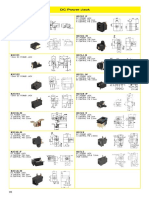
- PLUG DC Mantech Connectors ME249-098 PDFDocument1 pagePLUG DC Mantech Connectors ME249-098 PDFLodewyk KleynhansNo ratings yet
- Optical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - e PDFDocument9 pagesOptical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - e PDFLodewyk KleynhansNo ratings yet
- OpAmp - LM308AN - Motorola PDFDocument9 pagesOpAmp - LM308AN - Motorola PDFLodewyk KleynhansNo ratings yet
- OpAmp - LF451 PDFDocument8 pagesOpAmp - LF451 PDFLodewyk KleynhansNo ratings yet
- LCD HD44780U (LCD-II) PC 1601-F + PC 0802-A - Timing - Diagram PDFDocument1 pageLCD HD44780U (LCD-II) PC 1601-F + PC 0802-A - Timing - Diagram PDFLodewyk KleynhansNo ratings yet
- MCU - R8C27 - RENESAS R8C26 R8C27 - SOFTWARE MANUAL Rej09b0001 - r8csm PDFDocument298 pagesMCU - R8C27 - RENESAS R8C26 R8C27 - SOFTWARE MANUAL Rej09b0001 - r8csm PDFLodewyk KleynhansNo ratings yet
- OpAmp - LF147 LF247 LF347 - ST PDFDocument11 pagesOpAmp - LF147 LF247 LF347 - ST PDFLodewyk KleynhansNo ratings yet
- DGX 1 UserGuideDocument158 pagesDGX 1 UserGuidemeriem lazhariNo ratings yet
- RTOSDocument8 pagesRTOSAnuvab BiswasNo ratings yet
- Ghosting The KIP 3000 IPS - Revision3Document12 pagesGhosting The KIP 3000 IPS - Revision3junkdog100% (1)
- 1 - Memory Unit - Flip-Flops (DLP-2021-22)Document15 pages1 - Memory Unit - Flip-Flops (DLP-2021-22)SohneaNo ratings yet
- UNITROL® 1010 User Manual: Automatic Voltage RegulatorDocument166 pagesUNITROL® 1010 User Manual: Automatic Voltage RegulatorKaleem Ullah75% (4)
- Intel m10jnp2sb User GuideDocument79 pagesIntel m10jnp2sb User GuideErvin MachNo ratings yet
- Aqa Comp2 W QP Jan10Document12 pagesAqa Comp2 W QP Jan10Garrett ClarkeNo ratings yet
- Updates For BiosDocument2 pagesUpdates For BiosKerimNo ratings yet
- MAIN Electrical Parts List: FirmwareDocument14 pagesMAIN Electrical Parts List: FirmwareServi-vent MorenoNo ratings yet
- Home Made Automatic Water Dispensing Wash Basin by Using Arduino IdianDocument7 pagesHome Made Automatic Water Dispensing Wash Basin by Using Arduino Idianmoe myatNo ratings yet
- CSA Practical FileDocument23 pagesCSA Practical Fileprecious mNo ratings yet
- Handson Technology: Rdm6300 125Khz Rfid Card Reader ModuleDocument10 pagesHandson Technology: Rdm6300 125Khz Rfid Card Reader ModuleJose Luis Rosario SalvadorNo ratings yet
- TR-4471-0218-NetApp E-Series EF-Series Best Practices With VeeamDocument56 pagesTR-4471-0218-NetApp E-Series EF-Series Best Practices With Veeamta cloudNo ratings yet
- SetupDocument508 pagesSetupYantaru CornerNo ratings yet
- DDJ-SB Firmware Update Guide EDocument2 pagesDDJ-SB Firmware Update Guide EAlejandroCerveraNo ratings yet
- Transforming Datacenter Core With Dce Cisco NexusDocument27 pagesTransforming Datacenter Core With Dce Cisco NexusHồ Trung KiênNo ratings yet
- IT Asset InventoryDocument10 pagesIT Asset InventoryParamjeet KalraNo ratings yet
- InternalArchitecture 8086 - PPTDocument21 pagesInternalArchitecture 8086 - PPTGayatri JethaniNo ratings yet
- Ffbca 2 e 6Document2 pagesFfbca 2 e 6non BlancNo ratings yet
- Sistem Mikroprosessor: Week 4 Session 2Document44 pagesSistem Mikroprosessor: Week 4 Session 2Dedi BobNo ratings yet
- Parallel Computer Architecture ClassificationDocument23 pagesParallel Computer Architecture ClassificationDenisNo ratings yet
- EVS7048S-R: 48-HDD Enterprise Video StorageDocument3 pagesEVS7048S-R: 48-HDD Enterprise Video StorageDeltaz AZNo ratings yet
- Datasheet Easyio FG 20Document2 pagesDatasheet Easyio FG 20asdfNo ratings yet
- CSC 340 - Assignment 1Document10 pagesCSC 340 - Assignment 1Daniel sNo ratings yet
- VM RecommendationsDocument2 pagesVM RecommendationsAntonio MouraNo ratings yet
- Upload-Corrigendum - Annexure ADocument28 pagesUpload-Corrigendum - Annexure ARuchir ChaturvediNo ratings yet
- WEEK 3-4 SupplDocument9 pagesWEEK 3-4 SupplJoshua RamirezNo ratings yet
- LCD Monitor User Manual: LED BacklightDocument31 pagesLCD Monitor User Manual: LED Backlighta4558305No ratings yet
- Configuring Disk Mirroring For Windows Server 2012Document27 pagesConfiguring Disk Mirroring For Windows Server 2012CAINisLOOPusNo ratings yet
- Nisca PR-C201Document2 pagesNisca PR-C201IDSlayerNo ratings yet