You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Jung - Op-Amp Cookbook PDFDocument596 pagesJung - Op-Amp Cookbook PDFSethShafer100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PSR E403 e PDFDocument50 pagesPSR E403 e PDFelio villalbaNo ratings yet
- Antune Build InstructionsDocument4 pagesAntune Build InstructionsmvannierNo ratings yet
- AS380 Machine On-Site DebuggingDocument5 pagesAS380 Machine On-Site DebuggingTroubleshooting100% (1)
- SOUND CARD - Emagic A 62 en PDFDocument84 pagesSOUND CARD - Emagic A 62 en PDFLodewyk KleynhansNo ratings yet
- SOUND CARD - Sound Blaster X-Fi SB0679 Rev1.0 PDFDocument5 pagesSOUND CARD - Sound Blaster X-Fi SB0679 Rev1.0 PDFLodewyk KleynhansNo ratings yet
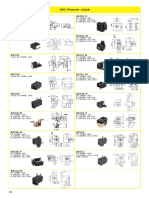
- PLUG DC Mantech Connectors ME249-098 PDFDocument1 pagePLUG DC Mantech Connectors ME249-098 PDFLodewyk KleynhansNo ratings yet
- Optical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - e PDFDocument9 pagesOptical Distance Sensor - GP2Y0D810Z0F Gp2y0d810z - e PDFLodewyk KleynhansNo ratings yet
- OpAmp - MCP6241 PDFDocument28 pagesOpAmp - MCP6241 PDFLodewyk KleynhansNo ratings yet
- OpAmp - LM308AN - Motorola PDFDocument9 pagesOpAmp - LM308AN - Motorola PDFLodewyk KleynhansNo ratings yet
- LCD HD44780U (LCD-II) PC 1601-F + PC 0802-A - Timing - Diagram PDFDocument1 pageLCD HD44780U (LCD-II) PC 1601-F + PC 0802-A - Timing - Diagram PDFLodewyk KleynhansNo ratings yet
- OpAmp - LF451 PDFDocument8 pagesOpAmp - LF451 PDFLodewyk KleynhansNo ratings yet
- MCU - R8C27 - RENESAS R8C26 R8C27 - SOFTWARE MANUAL Rej09b0001 - r8csm PDFDocument298 pagesMCU - R8C27 - RENESAS R8C26 R8C27 - SOFTWARE MANUAL Rej09b0001 - r8csm PDFLodewyk KleynhansNo ratings yet
- OpAmp - LF147 LF247 LF347 - ST PDFDocument11 pagesOpAmp - LF147 LF247 LF347 - ST PDFLodewyk KleynhansNo ratings yet
- Intelligent Memory ComputersDocument9 pagesIntelligent Memory ComputersJanna Tammar Al-WardNo ratings yet
- Nseries InverterDocument20 pagesNseries InverterAM76No ratings yet
- Assignment 1Document17 pagesAssignment 1Osamah MahmudNo ratings yet
- Service ManualDocument68 pagesService ManualTarra Ramakrishna RaoNo ratings yet
- Installation Instructions: CD200D Digital Ignition System Form CD200D II 9-10Document25 pagesInstallation Instructions: CD200D Digital Ignition System Form CD200D II 9-10wcuevasmNo ratings yet
- GMC 320PlusV4UserGuideDocument29 pagesGMC 320PlusV4UserGuideKrocodileNo ratings yet
- CMOS VLSI and Aspect of ASIC DesignDocument3 pagesCMOS VLSI and Aspect of ASIC DesignBittU BhagatNo ratings yet
- 71M651x Energy Meter IC: Using IR Diodes and PhototransistorsDocument7 pages71M651x Energy Meter IC: Using IR Diodes and Phototransistorsagus wiyonoNo ratings yet
- DB002 110705 G144a12Document32 pagesDB002 110705 G144a12Glen VanMilliganNo ratings yet
- Dell Optiplex 9010 Spec Sheet PDFDocument3 pagesDell Optiplex 9010 Spec Sheet PDFAkram.yishakNo ratings yet
- KP 43T85T 53SV85T 61SV85TDocument119 pagesKP 43T85T 53SV85T 61SV85TCasteloencantadoNo ratings yet
- 100065-c Controller-B (0403)Document144 pages100065-c Controller-B (0403)Ewerton FariasNo ratings yet
- Cohr Dilas Compact Ac PKGDocument2 pagesCohr Dilas Compact Ac PKGPhan ÂnNo ratings yet
- N-Channel 900 V, 1.56 Ω Typ., 5.8 A Supermesh™ Power Mosfet Ind Pak, To-220, To-220Fp And To-247 PackagesDocument26 pagesN-Channel 900 V, 1.56 Ω Typ., 5.8 A Supermesh™ Power Mosfet Ind Pak, To-220, To-220Fp And To-247 Packagesnanodocl5099No ratings yet
- EE445 Contents Table PDFDocument3 pagesEE445 Contents Table PDFIrfan QureshiNo ratings yet
- Input DevicesDocument4 pagesInput DevicesRebecca AlvarezNo ratings yet
- MTE HydrocalL Vs GE HydranDocument14 pagesMTE HydrocalL Vs GE HydranJorge GoyNo ratings yet
- Farayola Praise ResumeDocument1 pageFarayola Praise Resumeapi-441454348No ratings yet
- CP1W Mad11 PDFDocument14 pagesCP1W Mad11 PDFimblinkNo ratings yet
- Digital Transmission Pulse ModulationDocument33 pagesDigital Transmission Pulse ModulationLucky HimawanNo ratings yet
- Lynx LX v8Document5 pagesLynx LX v8Bambang KaryantoNo ratings yet
- Simulation and Timing in VHDL: EE 595 EDA / ASIC Design LabDocument15 pagesSimulation and Timing in VHDL: EE 595 EDA / ASIC Design LabbijoiuuNo ratings yet
- Barbary BLE GW DatasheetDocument2 pagesBarbary BLE GW DatasheetChawengsak ChoomuangNo ratings yet
- ESMO 2016 An Introduction To Electrical Diagnostic Testing of Power TransformersDocument8 pagesESMO 2016 An Introduction To Electrical Diagnostic Testing of Power TransformersBagus DwiNo ratings yet
- How To Flash Bios Chips With ArduinoDocument12 pagesHow To Flash Bios Chips With ArduinoMehmet Serdar TekeNo ratings yet
- Tutdac 99Document2 pagesTutdac 99baburao_kodavatiNo ratings yet