You might also like
- Design and Fabrication of Vegetable Slicing Machine Chapter 1-5Document32 pagesDesign and Fabrication of Vegetable Slicing Machine Chapter 1-5Winston74% (39)
- The Beck ProtocolDocument81 pagesThe Beck ProtocolwxcvbnnbvcxwNo ratings yet
- Detailed Lesson Planfeb6Document2 pagesDetailed Lesson Planfeb6Lorraine Anne Perez Calses100% (1)
- IJSRDV7I20236Document3 pagesIJSRDV7I20236gokeNo ratings yet
- Design and Compliance Control of A Robotic Gripper For Orange HarvestingDocument5 pagesDesign and Compliance Control of A Robotic Gripper For Orange HarvestingLeonardoGrandiniAdamiNo ratings yet
- PublishedPaper Automatic Onion Peeling and Cutting MachineDocument5 pagesPublishedPaper Automatic Onion Peeling and Cutting Machineዘረአዳም ዘመንቆረርNo ratings yet
- Cat Canh Cay Ca ChuaDocument7 pagesCat Canh Cay Ca Chuadangtuananhonepiece119No ratings yet
- Modeling and Path Simulation of An Autonomous Tomato Picking RobotDocument12 pagesModeling and Path Simulation of An Autonomous Tomato Picking RobotTJPRC PublicationsNo ratings yet
- 10 11648 J Ijfsb 20200503 131Document7 pages10 11648 J Ijfsb 20200503 1312 1No ratings yet
- Ground Nut Machine SemiDocument21 pagesGround Nut Machine SemiSuraj suryawanshiNo ratings yet
- An Agricultural Robotfor Multipurpose Operationsina GreenhouseDocument11 pagesAn Agricultural Robotfor Multipurpose Operationsina GreenhouseVillan teamNo ratings yet
- Motorized Vegtable Cutting MahineDocument21 pagesMotorized Vegtable Cutting MahineP24 Innovation CenterNo ratings yet
- Design and Fabrication of Crop Cutting Machine IJERTV8IS060212 PDFDocument6 pagesDesign and Fabrication of Crop Cutting Machine IJERTV8IS060212 PDFHaritha ChowdaryNo ratings yet
- Sensors: An Autonomous Fruit and Vegetable Harvester With A Low-Cost Gripper Using A 3D SensorDocument15 pagesSensors: An Autonomous Fruit and Vegetable Harvester With A Low-Cost Gripper Using A 3D SensorHiếu MinhNo ratings yet
- Paper 5Document6 pagesPaper 5ramblicasNo ratings yet
- Literature Review On Coconut Peeling MachineDocument8 pagesLiterature Review On Coconut Peeling MachineIJRASETPublications100% (1)
- Mechatronics - AgricultureDocument16 pagesMechatronics - AgricultureOsama AhmedNo ratings yet
- Journalnx DesignDocument3 pagesJournalnx DesignJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Synopsis On Multi Purpose Agricultural RobotDocument10 pagesSynopsis On Multi Purpose Agricultural Robotpavan pujarNo ratings yet
- Development of A Mobile Robot For Harvest Support in Greenhouse Horticulture - Person Following and MappingDocument6 pagesDevelopment of A Mobile Robot For Harvest Support in Greenhouse Horticulture - Person Following and MappingVänhëë ËscöbärNo ratings yet
- Design and Fabrication of Groundnut Pods and Shell Stripper: April 2018Document6 pagesDesign and Fabrication of Groundnut Pods and Shell Stripper: April 2018Sanket WaradeNo ratings yet
- Thesis Final Proposal PresentationDocument25 pagesThesis Final Proposal Presentationkibromkb100% (1)
- Huat - 2022 - Soft Gripper For Food HandlingDocument12 pagesHuat - 2022 - Soft Gripper For Food HandlingmikelaxnNo ratings yet
- Capstone Paper-Joshua AllenDocument40 pagesCapstone Paper-Joshua Allenapi-391978664No ratings yet
- 2015 T CispproceedingDocument7 pages2015 T CispproceedingJose LuisNo ratings yet
- Robotic Harvesting of Asparagus Using Machine Learning - B180129MEDocument28 pagesRobotic Harvesting of Asparagus Using Machine Learning - B180129METejo NathNo ratings yet
- Belforte 2017Document9 pagesBelforte 2017Jose LuisNo ratings yet
- Conference PaperDocument4 pagesConference Papersaipatil8600123No ratings yet
- Seed Sowing Plowing and Waste Grass Cutting Robot With Android ApplicationDocument6 pagesSeed Sowing Plowing and Waste Grass Cutting Robot With Android ApplicationvishwanathNo ratings yet
- Automatic Fruit Sorting MachineDocument3 pagesAutomatic Fruit Sorting MachineJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Reference2 - Development of An Automated Coconut Scraping MachineDocument14 pagesReference2 - Development of An Automated Coconut Scraping MachineRenz Callejo100% (1)
- 00-Design Parameters MentionedDocument12 pages00-Design Parameters MentionedTeptep GonzalesNo ratings yet
- A Cherry-Tomato Harvesting RobotDocument6 pagesA Cherry-Tomato Harvesting Robotdarel perezNo ratings yet
- Concept Design and Development of Semi Automated Potato Slicing Machine PDFDocument4 pagesConcept Design and Development of Semi Automated Potato Slicing Machine PDFjunaidadilNo ratings yet
- Design and Development of Peanut Peeler MachineDocument7 pagesDesign and Development of Peanut Peeler MachineKristoffer SamsonNo ratings yet
- AgribotDocument8 pagesAgribotShreyash patilNo ratings yet
- Agricultural Robot For Automatic Ploughing and SeedingDocument7 pagesAgricultural Robot For Automatic Ploughing and SeedingMadhusudhan N MNo ratings yet
- Design and Fabrication of Groundnut Pods and Shell StripperDocument5 pagesDesign and Fabrication of Groundnut Pods and Shell StripperSanket WaradeNo ratings yet
- Agricultural Shredder MachineDocument9 pagesAgricultural Shredder Machineahmad fauziNo ratings yet
- An Algorithm Based Low Cost Automated System For Irrigation With Soil Moisture SensorDocument5 pagesAn Algorithm Based Low Cost Automated System For Irrigation With Soil Moisture SensorMugdha DokeNo ratings yet
- Design and Fabrication of Organic Portable Shredder Machine IJERTV6IS080181Document4 pagesDesign and Fabrication of Organic Portable Shredder Machine IJERTV6IS080181Alodia JabamiNo ratings yet
- Zhao 2015Document6 pagesZhao 2015ramblicasNo ratings yet
- Agriculture RobotDocument15 pagesAgriculture Robotniya enzieNo ratings yet
- Multipurpose Agriculture Robot by Using Solar: NtroductionDocument3 pagesMultipurpose Agriculture Robot by Using Solar: NtroductionJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Sample ResearchDocument11 pagesSample ResearchJeffreyson Violango PascoNo ratings yet
- Research PaperDocument6 pagesResearch PaperTejas MachinesNo ratings yet
- Journal of Field Robotics - 2023 - Zhang - An Automated Apple Harvesting Robot From System Design To Field EvaluationDocument17 pagesJournal of Field Robotics - 2023 - Zhang - An Automated Apple Harvesting Robot From System Design To Field Evaluationbruno.rojasNo ratings yet
- Low Cost Agribot For Precision Farming Focused Spraying On Agri-LandDocument5 pagesLow Cost Agribot For Precision Farming Focused Spraying On Agri-LandInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Machines 11 00776Document26 pagesMachines 11 00776bruno.rojasNo ratings yet
- Analysis of Workspace and Kinematics For A Tomato Harvesting RobotDocument5 pagesAnalysis of Workspace and Kinematics For A Tomato Harvesting RobotSajani N. BannekaNo ratings yet
- Japan Agriculture Robot NoguchiDocument5 pagesJapan Agriculture Robot Noguchiquiron333No ratings yet
- A Harvesting Robot System For Fresh Cherry Tomato in GreenhouseDocument2 pagesA Harvesting Robot System For Fresh Cherry Tomato in Greenhouseamen abbasiNo ratings yet
- IJAIEM Paper FormatFruitPickerNSDocument7 pagesIJAIEM Paper FormatFruitPickerNSFrankDeviePaculguenQueridoNo ratings yet
- Project Proposal 1Document14 pagesProject Proposal 1SAMSON DOMINICKNo ratings yet
- Development of A Tomato Harvesting Robot Used in GreenhouseDocument10 pagesDevelopment of A Tomato Harvesting Robot Used in GreenhousePrimoJr CarilloNo ratings yet
- FAARM ReportDocument54 pagesFAARM ReportGowtham VijayaraghavanNo ratings yet
- Groundnut Peeling Shelling Machine: September 2020Document5 pagesGroundnut Peeling Shelling Machine: September 2020GAMUCHIRAI MUGADZANo ratings yet
- Towards Designing A Robot Gripper For Ef PDFDocument7 pagesTowards Designing A Robot Gripper For Ef PDFmouradNo ratings yet
- Automatic Multipurpose Agribot Using Arduino Mega and GPS Module ReceiverDocument9 pagesAutomatic Multipurpose Agribot Using Arduino Mega and GPS Module ReceiverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Development of Smart Machine For Sorting of DeceasDocument9 pagesDevelopment of Smart Machine For Sorting of DeceasChirag SoneriNo ratings yet
- Development of A Palm Fruit Bunch Chopper and Spikelet StripperDocument7 pagesDevelopment of A Palm Fruit Bunch Chopper and Spikelet Stripperinventionjournals100% (1)
- Cultivating Change : Robotics in Agriculture and the Future of Food ProductionFrom EverandCultivating Change : Robotics in Agriculture and the Future of Food ProductionNo ratings yet
- Overview of Solar DesalinationDocument17 pagesOverview of Solar Desalinationalagar krishna kumarNo ratings yet
- Mechatronics: Pushparaj Mani PathakDocument36 pagesMechatronics: Pushparaj Mani Pathakalagar krishna kumarNo ratings yet
- Static Analysis of A 6 - Axis Industrial Robot Using Finite Element AnalysisDocument7 pagesStatic Analysis of A 6 - Axis Industrial Robot Using Finite Element Analysisalagar krishna kumarNo ratings yet
- s17 PDFDocument5 pagess17 PDFalagar krishna kumarNo ratings yet
- Desalination by Using Alternative EnergyDocument20 pagesDesalination by Using Alternative Energyalagar krishna kumarNo ratings yet
- Sciencedirect Sciencedirect SciencedirectDocument4 pagesSciencedirect Sciencedirect Sciencedirectalagar krishna kumarNo ratings yet
- A Vibration Analysis of A 6 Axis Industrial Robot Using Fea: SciencedirectDocument8 pagesA Vibration Analysis of A 6 Axis Industrial Robot Using Fea: Sciencedirectalagar krishna kumarNo ratings yet
- Stress TypesDocument1 pageStress Typesalagar krishna kumarNo ratings yet
- Writing Goals and Objectives GoalsDocument2 pagesWriting Goals and Objectives Goalsalagar krishna kumarNo ratings yet
- Intro Robot Kinematics 5Document25 pagesIntro Robot Kinematics 5Gnanesh PendliNo ratings yet
- Unit 14 - Week 12: Assignment 12Document5 pagesUnit 14 - Week 12: Assignment 12alagar krishna kumarNo ratings yet
- Agreement Gold LoanDocument4 pagesAgreement Gold Loanalagar krishna kumarNo ratings yet
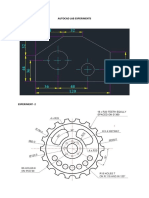
- Autocad Lab Experiments Experiment - 1Document3 pagesAutocad Lab Experiments Experiment - 1alagar krishna kumarNo ratings yet
- Fluid Mechanics Is A Branch of Science Which Deals With Fluids inDocument6 pagesFluid Mechanics Is A Branch of Science Which Deals With Fluids inalagar krishna kumarNo ratings yet
- Understanding Volume Kinetics: Robert G. HahnDocument9 pagesUnderstanding Volume Kinetics: Robert G. Hahnalagar krishna kumarNo ratings yet
- For Compressible Flow:: Displacement Thickness: It Is Denoted byDocument1 pageFor Compressible Flow:: Displacement Thickness: It Is Denoted byalagar krishna kumarNo ratings yet
- EGD Diagrams1Document3 pagesEGD Diagrams1alagar krishna kumarNo ratings yet
- Life QuotesDocument2 pagesLife Quotesalagar krishna kumarNo ratings yet
- MIT Poverty Fighters Abhijit Banerjee and Esther Duflo PDFDocument5 pagesMIT Poverty Fighters Abhijit Banerjee and Esther Duflo PDFchristian ramirezNo ratings yet
- Aluminium PDFDocument3 pagesAluminium PDFjagdish_pathadeNo ratings yet
- LINB10 Week 8 Slides PDFDocument44 pagesLINB10 Week 8 Slides PDFMorgan ZhangNo ratings yet
- Internet of Things (Iot) : Dr. Rafia MumtazDocument63 pagesInternet of Things (Iot) : Dr. Rafia MumtazAhmad AfzaalNo ratings yet
- Implementing Lease AccountingDocument32 pagesImplementing Lease Accountingsureshbabu muthavarapuNo ratings yet
- BDA14103 Engineering Mathematics 2-Tutorial 4Document2 pagesBDA14103 Engineering Mathematics 2-Tutorial 4KhaiNo ratings yet
- 2018 Budget Analysis Project DiDocument194 pages2018 Budget Analysis Project DiIgwe ChrisNo ratings yet
- 3 EDIT Lecture - 13 - DefenseDocument24 pages3 EDIT Lecture - 13 - DefenseRomanus PeterNo ratings yet
- CNRL Pipeline Welding Specifications 2009Document5 pagesCNRL Pipeline Welding Specifications 2009ntrkulja@hotmail.com100% (1)
- Event Management: Software Requirements Specification DocumentDocument17 pagesEvent Management: Software Requirements Specification DocumentMisbah SajidNo ratings yet
- Most Important Interview Questions For Electronics Communication EngineeringDocument11 pagesMost Important Interview Questions For Electronics Communication EngineeringPavan Kumar ThopaNo ratings yet
- 13 Questions Related To PackageDocument6 pages13 Questions Related To PackagePrashant kumarNo ratings yet
- Aakash National Talent Hunt Exam 2014 - AESPLDocument5 pagesAakash National Talent Hunt Exam 2014 - AESPLujjwal saha0% (1)
- Chapter-I: Introduction and Design of The StudyDocument52 pagesChapter-I: Introduction and Design of The StudyMartin AmbroseNo ratings yet
- Termene Si ConditiiDocument6 pagesTermene Si ConditiiAdrian DoruNo ratings yet
- E-Commerce Group 4 Team Strawberry Online Auctions Virtual Communities Web PortalsDocument108 pagesE-Commerce Group 4 Team Strawberry Online Auctions Virtual Communities Web Portalsapi-260051886100% (1)
- Undercover EconomistDocument26 pagesUndercover Economistkhandelwalpratik50% (2)
- Tanner Workbook: Trident Techlabs PVT LTD F.No. 304,3-6-369/2, Sanathana Ecstacy, Himayath Nagar HYDERABAD - 500029Document51 pagesTanner Workbook: Trident Techlabs PVT LTD F.No. 304,3-6-369/2, Sanathana Ecstacy, Himayath Nagar HYDERABAD - 500029karthikp207No ratings yet
- Audiolingual MethodDocument12 pagesAudiolingual Methodsedef özbekNo ratings yet
- Talisay City College: Teacher's Weekly Accomplishment Report (TWAR)Document1 pageTalisay City College: Teacher's Weekly Accomplishment Report (TWAR)ALEXANDREAHNo ratings yet
- S1103612GC21 Ag CLS-Lab-16Document14 pagesS1103612GC21 Ag CLS-Lab-16Waktole GenatiNo ratings yet
- Self Healing Behavior of High Strength Strain Hardening - 2023 - Construction ADocument10 pagesSelf Healing Behavior of High Strength Strain Hardening - 2023 - Construction AGabriela DraghiciNo ratings yet
- CELTA Preinterview TaskDocument6 pagesCELTA Preinterview TaskMimi MeridianNo ratings yet
- Resume ExampleDocument1 pageResume ExampleCorey CadiganNo ratings yet
- Hager Klik Lighting Connection Catalogue 1220Document44 pagesHager Klik Lighting Connection Catalogue 1220lizukyNo ratings yet
- Examp Probl 4.5-2 Lecture4Document8 pagesExamp Probl 4.5-2 Lecture4ArunNo ratings yet
- Shaft Hoisting SystemDocument3 pagesShaft Hoisting SystemJoël MwabiNo ratings yet
- Fire Cat. 3Document116 pagesFire Cat. 3Bruno VargasNo ratings yet