You might also like
- User Manual: Finite Element Models of Helmet Assessment Tools Version 1.0 For LS-DYNADocument35 pagesUser Manual: Finite Element Models of Helmet Assessment Tools Version 1.0 For LS-DYNAchoopoNo ratings yet
- Interconnecting Smart Objects with IP: The Next InternetFrom EverandInterconnecting Smart Objects with IP: The Next InternetRating: 5 out of 5 stars5/5 (1)
- IISF-Industry Internet of Things Security Framework v2 (Ebook)Document191 pagesIISF-Industry Internet of Things Security Framework v2 (Ebook)Mayer FernandesNo ratings yet
- Iic Pub G1 V1.80 2017-01-31Document58 pagesIic Pub G1 V1.80 2017-01-31Pema Chentsho100% (1)
- PIC Microcontroller Projects in C: Basic to AdvancedFrom EverandPIC Microcontroller Projects in C: Basic to AdvancedRating: 5 out of 5 stars5/5 (10)
- An Intrusion Detection System For Academic Institutions: January 2009Document78 pagesAn Intrusion Detection System For Academic Institutions: January 2009KRANTI AJIT (RA2011030010215)No ratings yet
- AADL An Introduction. (2006)Document145 pagesAADL An Introduction. (2006)Doug HodsonNo ratings yet
- Framework For Cyber-Physical Systems - Volume 1Document79 pagesFramework For Cyber-Physical Systems - Volume 1Vezt387No ratings yet
- Manual 2016 Riddell Revolution Classic Helmet Model v1.0Document32 pagesManual 2016 Riddell Revolution Classic Helmet Model v1.0choopoNo ratings yet
- Digi Web ServiceDocument199 pagesDigi Web ServiceDaniel CastillaNo ratings yet
- Textbook - Software Security Engineering A Guide For Project Managers A Guide For Project Managers (SEI Series in Software Engineering) by Julia H. AllenDocument367 pagesTextbook - Software Security Engineering A Guide For Project Managers A Guide For Project Managers (SEI Series in Software Engineering) by Julia H. AllenShreyash Hire100% (1)
- SDH / SONET Explained in Functional Models: Modeling the Optical Transport NetworkFrom EverandSDH / SONET Explained in Functional Models: Modeling the Optical Transport NetworkNo ratings yet
- Iic Pub G4 V1.00 PB-3Document173 pagesIic Pub G4 V1.00 PB-3blaljNo ratings yet
- SYS600 - Programming Language SCIL PDFDocument394 pagesSYS600 - Programming Language SCIL PDFAnonymous 9VcxlFErfNo ratings yet
- 从分布式信任构建密码系统Document242 pages从分布式信任构建密码系统tian abeiNo ratings yet
- First Restassured Handbook: S D P CDocument48 pagesFirst Restassured Handbook: S D P CtanmayanandaNo ratings yet
- ASME Soccer Robot - Group V PDFDocument54 pagesASME Soccer Robot - Group V PDFTan Tien NguyenNo ratings yet
- Developing Virtual Reality Applications: Foundations of Effective DesignFrom EverandDeveloping Virtual Reality Applications: Foundations of Effective DesignNo ratings yet
- Vehicular Networking: Automotive Applications and BeyondFrom EverandVehicular Networking: Automotive Applications and BeyondMarc EmmelmannNo ratings yet
- A Design of A Digital Lockout Tagout System With Machine LearningDocument66 pagesA Design of A Digital Lockout Tagout System With Machine Learningmelike sultan açık100% (1)
- Bayesian Networks: A Practical Guide to ApplicationsFrom EverandBayesian Networks: A Practical Guide to ApplicationsOlivier PourretRating: 2.5 out of 5 stars2.5/5 (2)
- Software Design Methodology: From Principles to Architectural StylesFrom EverandSoftware Design Methodology: From Principles to Architectural StylesRating: 5 out of 5 stars5/5 (1)
- Security Quadcopter: A Locally Assembled Drone for Video SurveillanceDocument50 pagesSecurity Quadcopter: A Locally Assembled Drone for Video SurveillanceJashan SinghNo ratings yet
- GEHC DICOM Conformance - Voluson E8 Version62x - KTI106102 - Rev2 PDFDocument88 pagesGEHC DICOM Conformance - Voluson E8 Version62x - KTI106102 - Rev2 PDFRavi NishankarNo ratings yet
- Network Security Trends in Hybrid Cloud EnvironmentsDocument24 pagesNetwork Security Trends in Hybrid Cloud EnvironmentsOnder YardasNo ratings yet
- The Plausibility of Future Scenarios: Conceptualising an Unexplored Criterion in Scenario PlanningFrom EverandThe Plausibility of Future Scenarios: Conceptualising an Unexplored Criterion in Scenario PlanningNo ratings yet
- Blue Team Handbook PDFDocument223 pagesBlue Team Handbook PDFVictor MayorgaNo ratings yet
- UGiBuilder User Guide IDX 33rev C04242015Document556 pagesUGiBuilder User Guide IDX 33rev C04242015Анатолий Малов100% (1)
- Wiley.Cloud.and.Edge.NetworkingDocument303 pagesWiley.Cloud.and.Edge.NetworkingFackTNo ratings yet
- GDD 06 07 PDFDocument116 pagesGDD 06 07 PDFUyavie ObonnaNo ratings yet
- Entity Properties and Parameters 7 1 5Document623 pagesEntity Properties and Parameters 7 1 5Anonymous GtBrT1No ratings yet
- Bachelor's Final Project - Investigating Artificial Intelligence Applied To RoboticsDocument72 pagesBachelor's Final Project - Investigating Artificial Intelligence Applied To RoboticsKrits BerryNo ratings yet
- Applying Mobile Agents To Intrusion Detection and Response: NIST Interim Report (IR) - 6416 October 1999Document49 pagesApplying Mobile Agents To Intrusion Detection and Response: NIST Interim Report (IR) - 6416 October 1999ankesh009No ratings yet
- Technical Information Microscan3 Outdoorscan3 Nanoscan3 Data Output Via Udp and TCP Ip en Im0083701Document76 pagesTechnical Information Microscan3 Outdoorscan3 Nanoscan3 Data Output Via Udp and TCP Ip en Im0083701DWNo ratings yet
- Iot-Open - Eu ENDocument360 pagesIot-Open - Eu ENsunxing22100% (5)
- 04 - A Framework For Usable and Secure PDFDocument243 pages04 - A Framework For Usable and Secure PDFAB DSNo ratings yet
- Airline Reservation System Requirements Research ProposalDocument28 pagesAirline Reservation System Requirements Research ProposalDeepika ChandNo ratings yet
- Sys600 Opc ServerDocument52 pagesSys600 Opc ServerAbhijit JNo ratings yet
- Operating Instructions DeTec4 Core en IM0048011Document80 pagesOperating Instructions DeTec4 Core en IM0048011Angel LopezNo ratings yet
- Automatic Plant Trimming System DJTDocument45 pagesAutomatic Plant Trimming System DJTالأردني JordanianNo ratings yet
- Software Requirement Engineering Airline Reservations System Wathik Almayali Phase1 IP5Document28 pagesSoftware Requirement Engineering Airline Reservations System Wathik Almayali Phase1 IP5AAKASH SNo ratings yet
- 2017-08-23 - CloudSkulk - Design of A Nested VM-Based RITM AttackDocument108 pages2017-08-23 - CloudSkulk - Design of A Nested VM-Based RITM AttackxsddNo ratings yet
- Airline Reservation System Requirements Research ProposalDocument28 pagesAirline Reservation System Requirements Research ProposalRachit ZambreNo ratings yet
- Troubleshooting Optical Fiber Networks: Understanding and Using Optical Time-Domain ReflectometersFrom EverandTroubleshooting Optical Fiber Networks: Understanding and Using Optical Time-Domain ReflectometersRating: 5 out of 5 stars5/5 (2)
- SICK Sensor Operating ManualDocument136 pagesSICK Sensor Operating ManualArman KhanNo ratings yet
- Jta50 20030404 PDFDocument250 pagesJta50 20030404 PDFConstantin CalimanNo ratings yet
- SDN-based Proactive Defense for Cloud SystemsDocument154 pagesSDN-based Proactive Defense for Cloud SystemsAntonio Huanca AvilaNo ratings yet
- Network Processors: Architecture, Programming, and ImplementationFrom EverandNetwork Processors: Architecture, Programming, and ImplementationNo ratings yet
- Developing Intelligent Agent Systems: A Practical GuideFrom EverandDeveloping Intelligent Agent Systems: A Practical GuideRating: 3 out of 5 stars3/5 (1)
- Drawing Based Game Project: DynadrawDocument27 pagesDrawing Based Game Project: DynadrawygtNo ratings yet
- Thesis Esubalew MulatDocument92 pagesThesis Esubalew MulatRamadanNo ratings yet
- Manual 2016 Riddell Revolution Classic Helmet Model v1.0Document32 pagesManual 2016 Riddell Revolution Classic Helmet Model v1.0choopoNo ratings yet
- Riley2013 Foot Kinematics and Loading of Professional Athletes in AmericanDocument7 pagesRiley2013 Foot Kinematics and Loading of Professional Athletes in AmericanchoopoNo ratings yet
- BRII Fact Sheet Cotton Research and Development Corporation PDFDocument2 pagesBRII Fact Sheet Cotton Research and Development Corporation PDFchoopoNo ratings yet
- Biofabrication and Tissue Engineering: Insight SeriesDocument13 pagesBiofabrication and Tissue Engineering: Insight SerieschoopoNo ratings yet
- Manual 2016 Schutt Air XP Pro Helmet Model v1.0Document30 pagesManual 2016 Schutt Air XP Pro Helmet Model v1.0choopoNo ratings yet
- Book For ResearchersDocument16 pagesBook For Researcherslaugh47No ratings yet
- Time 4 ResearchpresentationslidesDocument66 pagesTime 4 ResearchpresentationslideschoopoNo ratings yet
- User Manual: Finite Element Model of 2016 Xenith X2E (Safety Equipment Institute Model X2E) Version 1.0 For LS-DYNADocument41 pagesUser Manual: Finite Element Model of 2016 Xenith X2E (Safety Equipment Institute Model X2E) Version 1.0 For LS-DYNAchoopoNo ratings yet
- TranscriptDocument2 pagesTranscriptchoopoNo ratings yet
- Turbo Change Your Writing Today - NatureDocument2 pagesTurbo Change Your Writing Today - NatureDaniel LujánNo ratings yet
- Transcript 2Document2 pagesTranscript 2choopoNo ratings yet
- Essay Writing GuideDocument25 pagesEssay Writing GuideChe HindsNo ratings yet
- Nature Waiting For Motivational Fairy PDFDocument1 pageNature Waiting For Motivational Fairy PDFnirajkulkarni09No ratings yet
- SAC AUS18 Agenda v29 PDFDocument2 pagesSAC AUS18 Agenda v29 PDFchoopoNo ratings yet
- Assembly64 PDFDocument357 pagesAssembly64 PDFAnonymous qHRe6oNo ratings yet
- RubbishDocument1 pageRubbishchoopoNo ratings yet
- SAC AUS18 Agenda v29 PDFDocument2 pagesSAC AUS18 Agenda v29 PDFchoopoNo ratings yet
- Australian Engineering Education Facts - Update October 2018Document2 pagesAustralian Engineering Education Facts - Update October 2018choopoNo ratings yet
- Untitled 1Document1 pageUntitled 1choopoNo ratings yet
- NMNBDocument3 pagesNMNBchoopoNo ratings yet
- Wearable ExoDocument1 pageWearable ExochoopoNo ratings yet
- Share-LinkDocument1 pageShare-LinkchoopoNo ratings yet
- RubbishDocument1 pageRubbishchoopoNo ratings yet
- Jim 2018 0001Document5 pagesJim 2018 0001choopoNo ratings yet
- Structural EfficiencyDocument5 pagesStructural EfficiencychoopoNo ratings yet
- SsDocument1 pageSschoopoNo ratings yet
- Dakota White, Kyle Perry CEA A-Day P.MDocument6 pagesDakota White, Kyle Perry CEA A-Day P.MchoopoNo ratings yet
- LICENSEDocument2 pagesLICENSEchoopoNo ratings yet
- Astm d445Document8 pagesAstm d445Anonymous 6meMTlNo ratings yet
- Chapter 4 Theory of Consumer BehaviourDocument9 pagesChapter 4 Theory of Consumer BehaviourYus Linda100% (1)
- T5L 400 PR221DS-LS/I in 400 3p F FDocument3 pagesT5L 400 PR221DS-LS/I in 400 3p F FLê Xuân ĐịnhNo ratings yet
- Grammar Skills QuestionnaireDocument4 pagesGrammar Skills QuestionnaireemanNo ratings yet
- Shree MetriDocument18 pagesShree Metrivireshsa789No ratings yet
- Data Network Threats and Penetration TestingDocument5 pagesData Network Threats and Penetration TestingJournal of Telecommunications100% (1)
- PS3 Prompt Explained With Examples in LinuxDocument2 pagesPS3 Prompt Explained With Examples in LinuxSaka KelyNo ratings yet
- 7805T Ecg-960Document2 pages7805T Ecg-960bellscbNo ratings yet
- Ei Suender PLCopen V05 PicsDocument21 pagesEi Suender PLCopen V05 PicsLilamala LilavelikaNo ratings yet
- Paramedical Eligible List 2021-22Document473 pagesParamedical Eligible List 2021-22CHC ALLAGADDANo ratings yet
- Micron NAND Flash MLC 16-32-64 - 128GbDocument115 pagesMicron NAND Flash MLC 16-32-64 - 128GbSatya NarayanaNo ratings yet
- Combo FixDocument4 pagesCombo FixJulio Cesar Camones CastilloNo ratings yet
- JadualDocument4 pagesJadualhouseNo ratings yet
- BMW ISIS Workshop System Management PDFDocument68 pagesBMW ISIS Workshop System Management PDFNick LesterNo ratings yet
- BBS Model Question 2020Document44 pagesBBS Model Question 2020JALDIMAINo ratings yet
- IADC Formula Sheet: X X X + + ÷ X + X - ÷ XDocument5 pagesIADC Formula Sheet: X X X + + ÷ X + X - ÷ XMarwa ElghifaryNo ratings yet
- ArchModels Volume - 126 PDFDocument40 pagesArchModels Volume - 126 PDFgombestralalaNo ratings yet
- ICAO Annex 14 Vol II - Heliports Update - Workshop #2 2012 PDFDocument167 pagesICAO Annex 14 Vol II - Heliports Update - Workshop #2 2012 PDFMário Mineiro100% (1)
- Inductive and Deductive Bible StudiesDocument9 pagesInductive and Deductive Bible StudiesgethornNo ratings yet
- Pci 22 PDFDocument322 pagesPci 22 PDFAnonymous pcNdMpNENo ratings yet
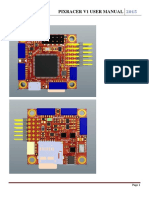
- Pixracer V1 User Manual EN PDFDocument8 pagesPixracer V1 User Manual EN PDFChrisNo ratings yet
- CPAC 2 - Vit CDocument3 pagesCPAC 2 - Vit CNoruwa EKUASENo ratings yet
- Rank and Nullity TheoremDocument6 pagesRank and Nullity TheoremsdfsdfNo ratings yet
- Challenges For Control Research CompilationDocument76 pagesChallenges For Control Research CompilationAlexander Losada AlmonacidNo ratings yet
- Chemistry Form 5 Chapter 1 - Rate of ReactionDocument63 pagesChemistry Form 5 Chapter 1 - Rate of ReactionSiti Nursyafiqah100% (7)
- Different Types of GraphsDocument12 pagesDifferent Types of GraphsKianne RM, WCAANo ratings yet
- Advances in Methods and Applications of Quantum Systems in Chemistry, Physics, and BiologyDocument361 pagesAdvances in Methods and Applications of Quantum Systems in Chemistry, Physics, and BiologyVan De BeerNo ratings yet
- Zonestar GuideDocument59 pagesZonestar GuidepepeNo ratings yet
- Prokofiev NotesDocument14 pagesProkofiev NotesUlyssesm90No ratings yet
- Hydril GK Annular Blowout Preventers: 18-3/4"-10,000 Psi Ram BOP Automatic Multiple Position Lock (MPL) IllustratedDocument4 pagesHydril GK Annular Blowout Preventers: 18-3/4"-10,000 Psi Ram BOP Automatic Multiple Position Lock (MPL) IllustratedJose BarreroNo ratings yet