You might also like
- Temporal Feature Warping For Video Shadow DetectioDocument12 pagesTemporal Feature Warping For Video Shadow DetectioPriyal MehtaNo ratings yet
- Learning Video Object Segmentation From Static ImagesDocument10 pagesLearning Video Object Segmentation From Static ImagesJunaid KNo ratings yet
- Engineering Journal A Fire Fly Optimization Based Video Object Co-SegmentationDocument7 pagesEngineering Journal A Fire Fly Optimization Based Video Object Co-SegmentationEngineering JournalNo ratings yet
- Stable Video DiffusionDocument30 pagesStable Video DiffusionЄвгеній АнтоненкоNo ratings yet
- Video Representation Learning by Dense Predictive Coding 1909.04656Document13 pagesVideo Representation Learning by Dense Predictive Coding 1909.04656FgpeqwNo ratings yet
- Learning Temporal Embeddings For Complex Video AnalysisDocument9 pagesLearning Temporal Embeddings For Complex Video AnalysisTzu-Hsien TsaiNo ratings yet
- Unsupervised Learning of Depth and Ego-Motion From VideoDocument10 pagesUnsupervised Learning of Depth and Ego-Motion From VideoSagar URNo ratings yet
- Wang End-to-End Video Instance Segmentation With Transformers CVPR 2021 Paper PDFDocument10 pagesWang End-to-End Video Instance Segmentation With Transformers CVPR 2021 Paper PDFtadeas kellyNo ratings yet
- Superframes, A Temporal Video SegmentationDocument6 pagesSuperframes, A Temporal Video SegmentationAp MllNo ratings yet
- Spatiotemporal Integration Network For Video Saliency Detection....Document18 pagesSpatiotemporal Integration Network For Video Saliency Detection....GALLEGO LUPIANEZNo ratings yet
- Pattern Recognition Letters: Chengyuan Zhang, Yunwu Lin, Lei Zhu, Anfeng Liu, Zuping Zhang, Fang HuangDocument7 pagesPattern Recognition Letters: Chengyuan Zhang, Yunwu Lin, Lei Zhu, Anfeng Liu, Zuping Zhang, Fang HuangMina MohammadiNo ratings yet
- 11 (2020) Yuan Li - Visual Object Tracking With Adaptive Structural Convolutional NetworkDocument11 pages11 (2020) Yuan Li - Visual Object Tracking With Adaptive Structural Convolutional Networkmat felNo ratings yet
- Zero-Shot Video Object Segmentation With Co-Attention Siamese NetworksDocument15 pagesZero-Shot Video Object Segmentation With Co-Attention Siamese Networksresearch usmaniNo ratings yet
- Learning Video Object Segmentation From Static ImagesDocument16 pagesLearning Video Object Segmentation From Static ImagesAlejandro PosadaNo ratings yet
- Fast Online Object Tracking and Segmentation: A Unifying ApproachDocument13 pagesFast Online Object Tracking and Segmentation: A Unifying ApproachcfvsdfNo ratings yet
- Real-Time Moving Vehicle Detection, Tracking, and Counting System Implemented With OpencvDocument4 pagesReal-Time Moving Vehicle Detection, Tracking, and Counting System Implemented With OpencvYash HulkeNo ratings yet
- An Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringDocument27 pagesAn Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringAchuth VishnuNo ratings yet
- Quo Vadis, Action Recognition? A New Model and The Kinetics DatasetDocument10 pagesQuo Vadis, Action Recognition? A New Model and The Kinetics DatasetAkashGargNo ratings yet
- A66 BergmanDocument8 pagesA66 Bergmanisrael_l13No ratings yet
- Yu 等。 - 2021 - Frequency-Aware Spatiotemporal Transformers for ViDocument10 pagesYu 等。 - 2021 - Frequency-Aware Spatiotemporal Transformers for Vitadeas kellyNo ratings yet
- A Unified Scheme For Super-Resolution and Depth Estimation From Asymmetric Stereoscopic VideoDocument14 pagesA Unified Scheme For Super-Resolution and Depth Estimation From Asymmetric Stereoscopic VideoSanjay ShelarNo ratings yet
- Object Detection in Videos by High Quality Object LinkingDocument7 pagesObject Detection in Videos by High Quality Object LinkingAmrutasagar KavarthapuNo ratings yet
- Anamoly Detection With CodeDocument18 pagesAnamoly Detection With CodeyojoNo ratings yet
- DL SurveyDocument12 pagesDL SurveyYe DuNo ratings yet
- Koch A Transformer-Based Late-Fusion Mechanism For Fine-Grained Object Recognition in Videos WACVW 2023 PaperDocument10 pagesKoch A Transformer-Based Late-Fusion Mechanism For Fine-Grained Object Recognition in Videos WACVW 2023 Papermypersonal0783No ratings yet
- Learning Joint Spatial-Temporal Transformations For Video InpaintingDocument23 pagesLearning Joint Spatial-Temporal Transformations For Video InpaintingLK AnhDungNo ratings yet
- FW-GAN: Flow-Navigated Warping GAN For Video Virtual Try-OnDocument10 pagesFW-GAN: Flow-Navigated Warping GAN For Video Virtual Try-OnThắng VănNo ratings yet
- TPSeNCE: Towards Artifact-Free Realistic Rain Generation For Deraining and Object Detection in RainDocument7 pagesTPSeNCE: Towards Artifact-Free Realistic Rain Generation For Deraining and Object Detection in Rainmallikarjunareddy kotaNo ratings yet
- Imposing Consistency For Optical Flow EstimationDocument14 pagesImposing Consistency For Optical Flow Estimation948261817No ratings yet
- A View-Free Image Stitching Network Based On Global HomographyDocument9 pagesA View-Free Image Stitching Network Based On Global HomographyklammNo ratings yet
- View Synthesis Motion Estimation For Multiview Distributed Video CodingDocument5 pagesView Synthesis Motion Estimation For Multiview Distributed Video CodingKrishna Reddy KondaNo ratings yet
- Blazingly Fast SegDocument10 pagesBlazingly Fast SegadityaNo ratings yet
- Review Paper Yonas - BrhanuDocument4 pagesReview Paper Yonas - BrhanuyonasNo ratings yet
- Tokenlearner: What Can 8 Learned Tokens Do For Images and Videos?Document21 pagesTokenlearner: What Can 8 Learned Tokens Do For Images and Videos?Papasanimohan SrinivasNo ratings yet
- Efficient Visual Tracking With Stacked Channel-Spatial Attention LearningDocument13 pagesEfficient Visual Tracking With Stacked Channel-Spatial Attention Learningsobuz visualNo ratings yet
- Diba DynamoNet Dynamic Action and Motion Network ICCV 2019 PaperDocument10 pagesDiba DynamoNet Dynamic Action and Motion Network ICCV 2019 PaperGG GENo ratings yet
- A Straightforward Framework For Video Retrieval Using CLIPDocument10 pagesA Straightforward Framework For Video Retrieval Using CLIPmultipurposeNo ratings yet
- An Introduction To Rehabilitation EngineeringDocument6 pagesAn Introduction To Rehabilitation EngineeringAnonymous HUY0yRexYfNo ratings yet
- 2302.03011 Ai Video CreationDocument26 pages2302.03011 Ai Video CreationBosna RomeoNo ratings yet
- Benchmarking Sec21Document17 pagesBenchmarking Sec21SANDHYA RANI N 218002114No ratings yet
- Deep Video DeblurringDocument10 pagesDeep Video DeblurringhhhNo ratings yet
- Image and Video Face Retrieval With Query Image Using Convolutional Neural Network FeaturesDocument8 pagesImage and Video Face Retrieval With Query Image Using Convolutional Neural Network FeaturesIAES IJAINo ratings yet
- Deep Generative Video CompressionDocument15 pagesDeep Generative Video CompressionMoaz AlomaryNo ratings yet
- A Benchmark Dataset and Saliency-Guided Stacked Autoencoders For Video-Based Salient Object DetectionDocument16 pagesA Benchmark Dataset and Saliency-Guided Stacked Autoencoders For Video-Based Salient Object DetectionSelvaNo ratings yet
- 11 (2020) Yuan Fan - Learning Target-Focusing Convolutional Regression Model For Visual Object TrackingDocument10 pages11 (2020) Yuan Fan - Learning Target-Focusing Convolutional Regression Model For Visual Object Trackingmat felNo ratings yet
- Aafaq Spatio-Temporal Dynamics and Semantic Attribute Enriched Visual Encoding For Video CVPR 2019 PaperDocument10 pagesAafaq Spatio-Temporal Dynamics and Semantic Attribute Enriched Visual Encoding For Video CVPR 2019 Paperford ferrariNo ratings yet
- Three Things Everyone Should Know About Vision TransformersDocument22 pagesThree Things Everyone Should Know About Vision Transformersedfewf3No ratings yet
- YOLO Net On iOS: Maneesh Apte Stanford University Simar Mangat Stanford University Priyanka Sekhar Stanford UniversityDocument8 pagesYOLO Net On iOS: Maneesh Apte Stanford University Simar Mangat Stanford University Priyanka Sekhar Stanford UniversityHoài DuyNo ratings yet
- Spatio-Temporal Deformable Convolution For Compressed Video Quality EnhancementDocument8 pagesSpatio-Temporal Deformable Convolution For Compressed Video Quality EnhancementSunilmahek MahekNo ratings yet
- (2019) Zhang Wang - Towards Real-Time Multi-Object TrackingDocument17 pages(2019) Zhang Wang - Towards Real-Time Multi-Object Trackingmat felNo ratings yet
- EI 2017 Art00004 Grigorios-TsagkatakisDocument6 pagesEI 2017 Art00004 Grigorios-Tsagkatakismr.parth147No ratings yet
- MDMMT: Multidomain Multimodal Transformer For Video RetrievalDocument18 pagesMDMMT: Multidomain Multimodal Transformer For Video Retrievaldj bajiNo ratings yet
- Iccv 2005 86Document8 pagesIccv 2005 86zhaobingNo ratings yet
- Two-Stream Convolutional Networks For Action Recognition in VideosDocument9 pagesTwo-Stream Convolutional Networks For Action Recognition in VideosVenkata PraneethNo ratings yet
- Image/Video Segmentation Using Bodypix Model: Department of Computer St. John College of Engineering and ManagementDocument5 pagesImage/Video Segmentation Using Bodypix Model: Department of Computer St. John College of Engineering and Managementshaikh waseemNo ratings yet
- An Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringDocument10 pagesAn Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringAchuth VishnuNo ratings yet
- 1 s2.0 S0031320322007518 MainDocument12 pages1 s2.0 S0031320322007518 Mainnofearknight625No ratings yet
- Learning To Compare Image Patches Via Convolutional Neural NetworksDocument9 pagesLearning To Compare Image Patches Via Convolutional Neural NetworksSiva Jyothi ChandraNo ratings yet
- Robust Real-Time Visual Tracking Using Pixel-Wise PosteriorsDocument14 pagesRobust Real-Time Visual Tracking Using Pixel-Wise PosteriorsHuy Nguyễn BảoNo ratings yet
- Smooth Foreground-Background Segmentation For Video ProcessingDocument10 pagesSmooth Foreground-Background Segmentation For Video Processingkaran tanwarNo ratings yet
- Indian Institute of Technology Delhi: Semester Schedule For Semester II 2019-20 (Proposed)Document5 pagesIndian Institute of Technology Delhi: Semester Schedule For Semester II 2019-20 (Proposed)karan tanwarNo ratings yet
- Summary of Activities For Other Than Ug First Year Courses Student SRDocument3 pagesSummary of Activities For Other Than Ug First Year Courses Student SRkaran tanwarNo ratings yet
- Summary of Activities For Other Than Ug First Year Courses Student SRDocument3 pagesSummary of Activities For Other Than Ug First Year Courses Student SRkaran tanwarNo ratings yet
- Summary of Activities For Other Than Ug First Year Courses Student SRDocument3 pagesSummary of Activities For Other Than Ug First Year Courses Student SRkaran tanwarNo ratings yet
- Analysis of Two Area Power System With Battery Energy StorageDocument5 pagesAnalysis of Two Area Power System With Battery Energy StoragezahidNo ratings yet
- L2738 ManualDocument304 pagesL2738 ManualVaibhav Doshi100% (3)
- DaqDocument3 pagesDaqzoehdiismailNo ratings yet
- Research ProposalDocument6 pagesResearch Proposalapi-549913053No ratings yet
- R6013e MVTRDocument6 pagesR6013e MVTRlucnhamdaidon8426No ratings yet
- CSA Direct Acting Valves 8.2017Document42 pagesCSA Direct Acting Valves 8.2017dalla nabilNo ratings yet
- Analysis of Business EnvironmentDocument6 pagesAnalysis of Business EnvironmentLapi Boy MicsNo ratings yet
- Clark Green City ProjectDocument40 pagesClark Green City ProjectKatherine Gomez Bastian100% (6)
- Strategic Management Slides PDFDocument176 pagesStrategic Management Slides PDFskumar210No ratings yet
- J. QSPM: Build Four New Production Facilities in China, USA, and Eastern EuropeDocument4 pagesJ. QSPM: Build Four New Production Facilities in China, USA, and Eastern EuropeBilal Faiz RNo ratings yet
- Promaseal ADocument4 pagesPromaseal AKamila JihaneNo ratings yet
- Energy ModelDocument153 pagesEnergy ModelKashif AmjadNo ratings yet
- As 3006-1982 Adequate Electrical Installations in Domestic PremisesDocument8 pagesAs 3006-1982 Adequate Electrical Installations in Domestic PremisesSAI Global - APACNo ratings yet
- 87-10117-RevE OP95F1S Single-Ch DWDM OpticalFilterDocument2 pages87-10117-RevE OP95F1S Single-Ch DWDM OpticalFilterĐặng ĐứcNo ratings yet
- GPON - Fundamentals: Technical Team From FTTHDocument56 pagesGPON - Fundamentals: Technical Team From FTTHDaniel VieceliNo ratings yet
- IT AssignmentDocument3 pagesIT AssignmentKanthi Rekha VardhiNo ratings yet
- Cool Infographics Table of Contents PDFDocument5 pagesCool Infographics Table of Contents PDFCarolina ShortNo ratings yet
- Social Media Course SyllabusDocument9 pagesSocial Media Course Syllabusanthony_coccioloNo ratings yet
- LHD Isuzu MU-X 2017+ - Anti-Lock BrakeDocument1 pageLHD Isuzu MU-X 2017+ - Anti-Lock BrakeMuhammed DoumaNo ratings yet
- Brittleness IndexDocument3 pagesBrittleness IndexViviRachmawatiNo ratings yet
- BW ExtractorsDocument50 pagesBW ExtractorsnagredyNo ratings yet
- Scheuerle SPTM English Brochure PDFDocument4 pagesScheuerle SPTM English Brochure PDFJonp4ul_MiddletonNo ratings yet
- HVAC Systems Duct DesignDocument39 pagesHVAC Systems Duct Designsardarmkhan100% (2)
- Subsurface Ventilation Systems MVS-SVE - Chapter04Document36 pagesSubsurface Ventilation Systems MVS-SVE - Chapter04Ghita Noerma GuphitaNo ratings yet
- Schott Brochure Schott Vials English Us 20092017Document28 pagesSchott Brochure Schott Vials English Us 20092017Tomena ÁkosNo ratings yet
- Spisak Prevoznika 03 04Document40 pagesSpisak Prevoznika 03 04Dragan GolubovicNo ratings yet
- Wall Thickness Calculation - ASME B31.8 2007 (Template)Document1 pageWall Thickness Calculation - ASME B31.8 2007 (Template)LU1228100% (3)
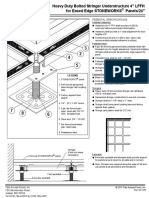
- 4in FFH HD Bolted Stringer For Eased Edge PanelsDocument1 page4in FFH HD Bolted Stringer For Eased Edge PanelsMichel PortocarreroNo ratings yet
- 4-H Communications Toolkit 4H1560 PDFDocument179 pages4-H Communications Toolkit 4H1560 PDFMistor Dupois WilliamsNo ratings yet
- Hibridni Oblak Una - Modul 4Document35 pagesHibridni Oblak Una - Modul 4Una DrakulićNo ratings yet