You might also like
- Yu 等。 - 2021 - Frequency-Aware Spatiotemporal Transformers for ViDocument10 pagesYu 等。 - 2021 - Frequency-Aware Spatiotemporal Transformers for Vitadeas kellyNo ratings yet
- EI 2017 Art00004 Grigorios-TsagkatakisDocument6 pagesEI 2017 Art00004 Grigorios-Tsagkatakismr.parth147No ratings yet
- MIT DriveSeg ManualDocument5 pagesMIT DriveSeg ManualsummrinaNo ratings yet
- Pattern Recognition Letters: Chengyuan Zhang, Yunwu Lin, Lei Zhu, Anfeng Liu, Zuping Zhang, Fang HuangDocument7 pagesPattern Recognition Letters: Chengyuan Zhang, Yunwu Lin, Lei Zhu, Anfeng Liu, Zuping Zhang, Fang HuangMina MohammadiNo ratings yet
- Learning Joint Spatial-Temporal Transformations For Video InpaintingDocument23 pagesLearning Joint Spatial-Temporal Transformations For Video InpaintingLK AnhDungNo ratings yet
- FAST VIDEO OBJECT SEGMENTATIONDocument10 pagesFAST VIDEO OBJECT SEGMENTATIONadityaNo ratings yet
- Quo Vadis, Action Recognition? A New Model and The Kinetics DatasetDocument10 pagesQuo Vadis, Action Recognition? A New Model and The Kinetics DatasetAkashGargNo ratings yet
- Simple, Efficient and Effective Encodings of Local Deep Features For Video Action RecognitionDocument8 pagesSimple, Efficient and Effective Encodings of Local Deep Features For Video Action RecognitionAnonymous ntIcRwM55RNo ratings yet
- Spatio-Temporal Dynamics and Semantic Attributes for Video CaptioningDocument10 pagesSpatio-Temporal Dynamics and Semantic Attributes for Video Captioningford ferrariNo ratings yet
- Learning Video Object Segmentation From Static ImagesDocument10 pagesLearning Video Object Segmentation From Static ImagesJunaid KNo ratings yet
- Superframes, A Temporal Video SegmentationDocument6 pagesSuperframes, A Temporal Video SegmentationAp MllNo ratings yet
- Rubiksnet: Learnable 3D-Shift For Efficient Video Action RecognitionDocument17 pagesRubiksnet: Learnable 3D-Shift For Efficient Video Action RecognitionJames Rafael BNo ratings yet
- J136 Automatic Dynamic Texture Transformation Based On A New Motion Coherence MetricDocument16 pagesJ136 Automatic Dynamic Texture Transformation Based On A New Motion Coherence MetricTimothy K ShihNo ratings yet
- Learning Video Object Segmentation From Static ImagesDocument16 pagesLearning Video Object Segmentation From Static ImagesAlejandro PosadaNo ratings yet
- Make-A-Video': Text To Video Generation: 1 AbstractDocument3 pagesMake-A-Video': Text To Video Generation: 1 AbstractDaniel CoronelNo ratings yet
- 2018-WarpingErrorDocument16 pages2018-WarpingErrorlaura.alvargonzaNo ratings yet
- Video Transformer NetworkDocument11 pagesVideo Transformer NetworkAqib MumtazNo ratings yet
- Video Database: Role of Video Feature ExtractionDocument5 pagesVideo Database: Role of Video Feature Extractionmulayam singh yadavNo ratings yet
- Video Salient Object Detection Using Spatiotemporal Deep FeaturesDocument14 pagesVideo Salient Object Detection Using Spatiotemporal Deep Features于富昇No ratings yet
- Learning temporal embeddings captures video frame semanticsDocument9 pagesLearning temporal embeddings captures video frame semanticsTzu-Hsien TsaiNo ratings yet
- Video Summarization Using Fully Convolutional Sequence NetworksDocument17 pagesVideo Summarization Using Fully Convolutional Sequence NetworksDavid DivadNo ratings yet
- Temporal Segment Networks: Towards Good Practices For Deep Action RecognitionDocument16 pagesTemporal Segment Networks: Towards Good Practices For Deep Action RecognitionAkashGargNo ratings yet
- A Fast Forgery Detection Algo Based On Exponenetial Fourier MomentsDocument16 pagesA Fast Forgery Detection Algo Based On Exponenetial Fourier MomentsNasrullah IqbalNo ratings yet
- Spatiotemporal Integration Network For Video Saliency Detection....Document18 pagesSpatiotemporal Integration Network For Video Saliency Detection....GALLEGO LUPIANEZNo ratings yet
- Unsupervised Deep Video Hashing With Balanced RotationDocument7 pagesUnsupervised Deep Video Hashing With Balanced RotationriadelectroNo ratings yet
- A Simple Baseline For Video Restoration With Grouped Spatial-Temporal ShiftDocument14 pagesA Simple Baseline For Video Restoration With Grouped Spatial-Temporal Shift黃丰楷No ratings yet
- Photorealistic Video Generation With Diffusion ModelsDocument13 pagesPhotorealistic Video Generation With Diffusion ModelsSayan HaldarNo ratings yet
- Temporal Feature Warping For Video Shadow DetectioDocument12 pagesTemporal Feature Warping For Video Shadow DetectioPriyal MehtaNo ratings yet
- Error Detection and Data Recovery Architecture For Motion EstimationDocument63 pagesError Detection and Data Recovery Architecture For Motion Estimationkasaragadda100% (1)
- A Unified Scheme For Super-Resolution and Depth Estimation From Asymmetric Stereoscopic VideoDocument14 pagesA Unified Scheme For Super-Resolution and Depth Estimation From Asymmetric Stereoscopic VideoSanjay ShelarNo ratings yet
- Heterogeneous Memory Model Answers Video QuestionsDocument9 pagesHeterogeneous Memory Model Answers Video QuestionsPhía Cuối Con ĐườngNo ratings yet
- Remote Sensing Image Change Detection With TransformersDocument14 pagesRemote Sensing Image Change Detection With Transformerszheng wangNo ratings yet
- An Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringDocument27 pagesAn Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringAchuth VishnuNo ratings yet
- Video-to-Video Synthesis: WebsiteDocument14 pagesVideo-to-Video Synthesis: WebsiteCristian CarlosNo ratings yet
- Stable Video DiffusionDocument30 pagesStable Video DiffusionЄвгеній АнтоненкоNo ratings yet
- Diba DynamoNet Dynamic Action and Motion Network ICCV 2019 PaperDocument10 pagesDiba DynamoNet Dynamic Action and Motion Network ICCV 2019 PaperGG GENo ratings yet
- Deep Affine Motion Compensation Network For Inter Prediction in VVCDocument11 pagesDeep Affine Motion Compensation Network For Inter Prediction in VVCMateus AraújoNo ratings yet
- Deep Video Compression through Image InterpolationDocument16 pagesDeep Video Compression through Image InterpolationVijayalakshmi SureshNo ratings yet
- An Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringDocument10 pagesAn Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringAchuth VishnuNo ratings yet
- Frame-Skip Convolutional Neural Networks For Action RecognitionDocument6 pagesFrame-Skip Convolutional Neural Networks For Action RecognitionMitchell Angel Gomez OrtegaNo ratings yet
- Diffusion Models For Video Prediction and Infilling: Tobias HöppeDocument22 pagesDiffusion Models For Video Prediction and Infilling: Tobias Höpperodhurt@gmail.comNo ratings yet
- Video Chatting Platform With Video Enhancing Feature Using Super ResolutionDocument7 pagesVideo Chatting Platform With Video Enhancing Feature Using Super ResolutionIJRASETPublicationsNo ratings yet
- MDMMT: Multidomain Multimodal Transformer for Video RetrievalDocument18 pagesMDMMT: Multidomain Multimodal Transformer for Video Retrievaldj bajiNo ratings yet
- Contour Based TrackingDocument20 pagesContour Based TrackingSahil SinghNo ratings yet
- A Good Image Generator Is What You Need For High Resolution Video SynthesisDocument23 pagesA Good Image Generator Is What You Need For High Resolution Video Synthesisjoey popeNo ratings yet
- TAP VidDocument34 pagesTAP Vidyechen xuNo ratings yet
- A Unified Spatiotemporal Prior Based On Geodesic Distance For Video Object SegmentationDocument18 pagesA Unified Spatiotemporal Prior Based On Geodesic Distance For Video Object Segmentationresearch usmaniNo ratings yet
- Video Saliency-Detection Using Custom Spatiotemporal Fusion MethodDocument7 pagesVideo Saliency-Detection Using Custom Spatiotemporal Fusion MethodIJRES teamNo ratings yet
- Yan Multiview Transformers For Video Recognition CVPR 2022 PaperDocument11 pagesYan Multiview Transformers For Video Recognition CVPR 2022 Papermypersonal0783No ratings yet
- Codef: Content Deformation Fields For Temporally Consistent Video ProcessingDocument11 pagesCodef: Content Deformation Fields For Temporally Consistent Video Processingdvae fredNo ratings yet
- (Visualization) Exploring New York in 8KDocument5 pages(Visualization) Exploring New York in 8Kdorientoon40No ratings yet
- McIntosh Visual-Textual Capsule Routing For Text-Based Video Segmentation CVPR 2020 PaperDocument10 pagesMcIntosh Visual-Textual Capsule Routing For Text-Based Video Segmentation CVPR 2020 PaperjoteyNo ratings yet
- VIDOSAT: High-Dimensional Sparsifying Transform Learning For Online Video DenoisingDocument13 pagesVIDOSAT: High-Dimensional Sparsifying Transform Learning For Online Video DenoisingSreedhar NagavellyNo ratings yet
- Learning Spatiotemporal Features With 3D Convolutional NetworksDocument16 pagesLearning Spatiotemporal Features With 3D Convolutional NetworksVenkata PraneethNo ratings yet
- Deep Residual Learning For Image and Video RecognitionDocument13 pagesDeep Residual Learning For Image and Video RecognitionAbu RayhanNo ratings yet
- Koch A Transformer-Based Late-Fusion Mechanism For Fine-Grained Object Recognition in Videos WACVW 2023 PaperDocument10 pagesKoch A Transformer-Based Late-Fusion Mechanism For Fine-Grained Object Recognition in Videos WACVW 2023 Papermypersonal0783No ratings yet
- Video Representation Learning by Dense Predictive Coding 1909.04656Document13 pagesVideo Representation Learning by Dense Predictive Coding 1909.04656FgpeqwNo ratings yet
- Wang - Human Action Recognition Algorithm Based On Multi-Feature Map Fusion - 2020Document9 pagesWang - Human Action Recognition Algorithm Based On Multi-Feature Map Fusion - 2020masoud kiaNo ratings yet
- Image and Video Face Retrieval With Query Image Using Convolutional Neural Network FeaturesDocument8 pagesImage and Video Face Retrieval With Query Image Using Convolutional Neural Network FeaturesIAES IJAINo ratings yet
- Architecture of ML Systems 04 Operator Fusion and Runtime AdaptationDocument31 pagesArchitecture of ML Systems 04 Operator Fusion and Runtime AdaptationPapasanimohan SrinivasNo ratings yet
- X3D: Expanding Architectures For Efficient Video RecognitionDocument14 pagesX3D: Expanding Architectures For Efficient Video RecognitionShuvo H AhmedNo ratings yet
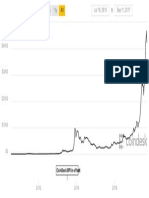
- Coindesk Bpi ChartDocument1 pageCoindesk Bpi ChartPapasanimohan SrinivasNo ratings yet
- Deep Networks-Based Video Classification Methods: A Literature OverviewDocument20 pagesDeep Networks-Based Video Classification Methods: A Literature OverviewPapasanimohan SrinivasNo ratings yet
- LIGAR: Lightweight General-Purpose Action Recognition: Evgeny IzutovDocument11 pagesLIGAR: Lightweight General-Purpose Action Recognition: Evgeny IzutovPapasanimohan SrinivasNo ratings yet
- The Adaptive Hough TransformDocument9 pagesThe Adaptive Hough TransformPapasanimohan SrinivasNo ratings yet
- Data Science LinksDocument1 pageData Science LinksPapasanimohan SrinivasNo ratings yet
- RouteDocument1 pageRoutePapasanimohan SrinivasNo ratings yet
- Lecture1 TemplateDocument15 pagesLecture1 TemplatePapasanimohan SrinivasNo ratings yet
- An Elementary Intro To Statistical Learning Theory PDFDocument112 pagesAn Elementary Intro To Statistical Learning Theory PDFPapasanimohan SrinivasNo ratings yet
- Network XDocument544 pagesNetwork XPapasanimohan SrinivasNo ratings yet
- cs229 Notes1 PDFDocument30 pagescs229 Notes1 PDFGuilherme GermanoNo ratings yet
- Reinforcement Learning CourseDocument15 pagesReinforcement Learning CoursePapasanimohan SrinivasNo ratings yet
- Quickly Implement cross-browser features with GestaltDocument8 pagesQuickly Implement cross-browser features with GestaltPapasanimohan SrinivasNo ratings yet
- Lecture1 TemplateDocument15 pagesLecture1 TemplatePapasanimohan SrinivasNo ratings yet
- 3d Printed VisualisationDocument10 pages3d Printed Visualisationastrid2271No ratings yet
- ACM-ICPC Balanced Diet Problem Limits Sweet PurchasesDocument26 pagesACM-ICPC Balanced Diet Problem Limits Sweet PurchasesJayesh NarayanNo ratings yet
- Learning Kernel Classifiers. Theory and AlgorithmsDocument371 pagesLearning Kernel Classifiers. Theory and Algorithmsngelectronic5226100% (2)
- KoDocument1 pageKoPapasanimohan SrinivasNo ratings yet
- InductiveGraphs JFP01 PDFDocument26 pagesInductiveGraphs JFP01 PDFPapasanimohan SrinivasNo ratings yet
- 52tries PDFDocument51 pages52tries PDFPapasanimohan SrinivasNo ratings yet
- On Lisp by Paul Graham - A Classic Every Hacker Should ReadDocument426 pagesOn Lisp by Paul Graham - A Classic Every Hacker Should Readanon-611261100% (15)
- 1978 Mountcastle Book PDFDocument27 pages1978 Mountcastle Book PDFPapasanimohan SrinivasNo ratings yet
- Machine LearningDocument76 pagesMachine LearningPapasanimohan SrinivasNo ratings yet
- Java Magazine JUnit 5 ArrivesDocument75 pagesJava Magazine JUnit 5 ArrivesWesley RamosNo ratings yet
- Binary Search Symbol Table.: Input FormatDocument1 pageBinary Search Symbol Table.: Input FormatPapasanimohan SrinivasNo ratings yet
- CS106X Handout 28: Hashing and HashMapsDocument3 pagesCS106X Handout 28: Hashing and HashMapsPapasanimohan SrinivasNo ratings yet
- Wilkinson 2001Document44 pagesWilkinson 2001Toño Gaspar MuñozNo ratings yet
- Multiple PDP Contexts User Guide Rev1Document16 pagesMultiple PDP Contexts User Guide Rev1ajit_balyan2003No ratings yet
- Criminal VIIIDocument31 pagesCriminal VIIIAnantHimanshuEkkaNo ratings yet
- HBR - Michael Porter - Redefining Competition in Healthcare - 2004 PDFDocument14 pagesHBR - Michael Porter - Redefining Competition in Healthcare - 2004 PDFYusfin DelfitaNo ratings yet
- Biometric Fingerprint Architecture For Home Security System: November 2016Document6 pagesBiometric Fingerprint Architecture For Home Security System: November 2016Kollimarala Srinivasa raoNo ratings yet
- Knowledge, Attitudes and Practices of Nursing Students on Dengue FeverDocument9 pagesKnowledge, Attitudes and Practices of Nursing Students on Dengue FeverElinNo ratings yet
- Structural Knowledge LEEERRR PDFDocument22 pagesStructural Knowledge LEEERRR PDFMaría Paula BaqueroNo ratings yet
- Training EvaluationDocument15 pagesTraining EvaluationAklima AkhiNo ratings yet
- Effect of Grain Boundary Thermal Expansion on Silicon Nitride Fracture ToughnessDocument8 pagesEffect of Grain Boundary Thermal Expansion on Silicon Nitride Fracture Toughnessbrijesh kinkhabNo ratings yet
- Underwater vessels, sensors, weapons and control systemsDocument1 pageUnderwater vessels, sensors, weapons and control systemsNguyễn ThaoNo ratings yet
- 4147ictte384 PDFDocument6 pages4147ictte384 PDFKandasamy AsohanNo ratings yet
- PXI Express Chassis 14/18-Slot Rack Mount Kits: Installation GuideDocument4 pagesPXI Express Chassis 14/18-Slot Rack Mount Kits: Installation GuideDomenico DomyNo ratings yet
- Week 1 - Revisiting and Evaluating FunctionsDocument12 pagesWeek 1 - Revisiting and Evaluating FunctionsShifra Jane PiqueroNo ratings yet
- Digital Fuel Calculation v.1Document4 pagesDigital Fuel Calculation v.1Julian ChanNo ratings yet
- Section 5: Finite Volume Methods For The Navier Stokes EquationsDocument27 pagesSection 5: Finite Volume Methods For The Navier Stokes EquationsUmutcanNo ratings yet
- Eriopon R LiqDocument4 pagesEriopon R LiqsaskoNo ratings yet
- JuliadatascienceDocument214 pagesJuliadatascienceFulvio JoséNo ratings yet
- TCS L6 ActsDocument7 pagesTCS L6 ActsBhebz Erin MaeNo ratings yet
- A Review of Air Filter TestDocument14 pagesA Review of Air Filter Testhussain mominNo ratings yet
- Lesson 1 G8Document11 pagesLesson 1 G8Malorie Dela CruzNo ratings yet
- Solution Map For Mining ppt3952 PDFDocument29 pagesSolution Map For Mining ppt3952 PDFHans AcainNo ratings yet
- Drewry Capability StatementDocument9 pagesDrewry Capability Statementmanis_sgsNo ratings yet
- Organic Compounds ExplainedDocument37 pagesOrganic Compounds ExplainedAlejandro VillanuevaNo ratings yet
- Class9-NTSE MATH WORKSHEETDocument4 pagesClass9-NTSE MATH WORKSHEETJeetu RaoNo ratings yet
- Resume Dianne Ostrander 4-27-06-09Document2 pagesResume Dianne Ostrander 4-27-06-09api-12400587No ratings yet
- MTA powerVAL Technical Data Sheet v00Document1 pageMTA powerVAL Technical Data Sheet v00muhammetNo ratings yet
- Acc Gr11 May 2009 PaperDocument13 pagesAcc Gr11 May 2009 PaperSam ChristieNo ratings yet
- Comparatives Board GameDocument2 pagesComparatives Board GameNathalie Alejandra Patiño LópezNo ratings yet
- MATH 499 Homework 2Document2 pagesMATH 499 Homework 2QuinnNgo100% (3)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)