You might also like
- Final ReviewDocument9 pagesFinal ReviewAlbert jonesNo ratings yet
- Linear Algebra Problems ExplainedDocument54 pagesLinear Algebra Problems ExplainedaniezahidNo ratings yet
- 221 HomeworkDocument45 pages221 Homeworkkevincshih100% (1)
- Applied 2012 TeamDocument3 pagesApplied 2012 TeamHaitao SuNo ratings yet
- AM Prelim 201801Document4 pagesAM Prelim 201801Al-Tarazi AssaubayNo ratings yet
- ProblemsDocument62 pagesProblemserad_5No ratings yet
- Exercises Part 2Document3 pagesExercises Part 2mileknzNo ratings yet
- Tutorials MathsDocument6 pagesTutorials MathssaraaanshNo ratings yet
- Math 220 Final ExamDocument3 pagesMath 220 Final ExamElle Michelle YangNo ratings yet
- 6.AppliedMathProb Team 2011Document2 pages6.AppliedMathProb Team 2011Yasamin RezashateriNo ratings yet
- Bifurcation Analysis of A Single Species Reacrion-Diffusion Model With Nonlocal DelayDocument33 pagesBifurcation Analysis of A Single Species Reacrion-Diffusion Model With Nonlocal DelaysecMC ussNo ratings yet
- Ginzburg - Linear Algebra ProblemsDocument5 pagesGinzburg - Linear Algebra ProblemsmarioasensicollantesNo ratings yet
- Exercises: Waves in SpaceDocument3 pagesExercises: Waves in SpaceKazaValiShaikNo ratings yet
- Quals-F21 Without SolutionsDocument6 pagesQuals-F21 Without SolutionsbassemaeNo ratings yet
- Linear Algebra Methods in CombinatoricsDocument11 pagesLinear Algebra Methods in CombinatoricsMatheus DomingosNo ratings yet
- Final 09Document2 pagesFinal 09Sutirtha SenguptaNo ratings yet
- JRF in Mathematics 2013Document10 pagesJRF in Mathematics 2013Ashwin JambhulkarNo ratings yet
- s04 Basic AdvcalcDocument2 pagess04 Basic AdvcalcshottyslingNo ratings yet
- MA 101 (Mathematics - I) : Tutorial Problems and Additional Practice Problems On Single-Variable CalculusDocument8 pagesMA 101 (Mathematics - I) : Tutorial Problems and Additional Practice Problems On Single-Variable CalculusGanesh KumarNo ratings yet
- Vectors and Matrices, Problem Set 3: Scalar Products and DeterminantsDocument3 pagesVectors and Matrices, Problem Set 3: Scalar Products and DeterminantsRoy VeseyNo ratings yet
- LA (Linear System, Vector Space, LI)Document3 pagesLA (Linear System, Vector Space, LI)hariombsdk69No ratings yet
- Mathematical Tripos Part IADocument7 pagesMathematical Tripos Part IAChristopher HitchensNo ratings yet
- Tute SignalsDocument12 pagesTute SignalsNikhil KumNo ratings yet
- May 2014 Ph.D. Preliminary Exam in ODEDocument4 pagesMay 2014 Ph.D. Preliminary Exam in ODEJiguo DaiNo ratings yet
- De Old ExamsDocument28 pagesDe Old ExamsOmarGarciaNo ratings yet
- PHYS3051 Methods Laplace Eq HomeworkDocument2 pagesPHYS3051 Methods Laplace Eq HomeworkKwong DavidNo ratings yet
- Homework 1 Graduate Real AnalysisDocument4 pagesHomework 1 Graduate Real AnalysislordpersonNo ratings yet
- Na August 2018Document3 pagesNa August 2018Djaafer MezhoudNo ratings yet
- Extending-the-Applicability-of-the-SuperHalleyLike-Method-Using-Continuous-Derivatives-and-Restricted-Convergence-DomainsDocument20 pagesExtending-the-Applicability-of-the-SuperHalleyLike-Method-Using-Continuous-Derivatives-and-Restricted-Convergence-Domainstalvane.santos069No ratings yet
- Problems and Solutions in Differential Geometry and ApplicationsDocument125 pagesProblems and Solutions in Differential Geometry and ApplicationsseimomNo ratings yet
- Tutorial 1Document2 pagesTutorial 1Sodisetty Rahul KoushikNo ratings yet
- Mathematical Tripos: Thursday, 7 June, 2018 1:30 PM To 4:30 PMDocument5 pagesMathematical Tripos: Thursday, 7 June, 2018 1:30 PM To 4:30 PMKaustubhNo ratings yet
- Preliminary Samples, McMasterDocument3 pagesPreliminary Samples, McMasterAl-Tarazi AssaubayNo ratings yet
- Shearer Levy Chapter 8Document20 pagesShearer Levy Chapter 8Daniel ComeglioNo ratings yet
- MPZ4230-Assignment 01-04Document10 pagesMPZ4230-Assignment 01-04surangabongaNo ratings yet
- Basic SolnsDocument32 pagesBasic Solnsapurva.tudekarNo ratings yet
- AM Prelim 202001Document4 pagesAM Prelim 202001Al-Tarazi AssaubayNo ratings yet
- Real Numbers and Sequences AssignmentDocument7 pagesReal Numbers and Sequences AssignmentSURYANSH KUMAR 18110168No ratings yet
- Linear Algebra Problems: Math 504 - 505 Jerry L. KazdanDocument80 pagesLinear Algebra Problems: Math 504 - 505 Jerry L. KazdanAnonymous 8lHmQse4rNo ratings yet
- MathsDocument7 pagesMathstrever07swagNo ratings yet
- Problem Sheet 1Document3 pagesProblem Sheet 1Esh-war RajNo ratings yet
- Partitioning cubes and squares into smaller piecesDocument4 pagesPartitioning cubes and squares into smaller piecesMuhammad Al KahfiNo ratings yet
- Problem Set 9 - 3DSEDocument4 pagesProblem Set 9 - 3DSEJesseNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- MA 542 - Differential Equations: End-Semester Examination Department of MathematicsDocument2 pagesMA 542 - Differential Equations: End-Semester Examination Department of MathematicsNaveen GuptaNo ratings yet
- Families of Exact Solutions of Biswas-Milovic Equation by An Exponential Rational Function MethodDocument27 pagesFamilies of Exact Solutions of Biswas-Milovic Equation by An Exponential Rational Function MethodGanesh KaduNo ratings yet
- Ode Pde 2013fallDocument3 pagesOde Pde 2013fallJiguo DaiNo ratings yet
- Calculus III: Practice Problems: Some Trigonometric IdentitiesDocument2 pagesCalculus III: Practice Problems: Some Trigonometric IdentitiesRoy VeseyNo ratings yet
- WOMPtalk ManifoldsDocument11 pagesWOMPtalk ManifoldsKirk BennettNo ratings yet
- TestDocument2 pagesTestd.panayi6528No ratings yet
- Answers 5 2012Document11 pagesAnswers 5 2012Eric KerrNo ratings yet
- Invese Scattering Problem For Perturbed Bi Harmonic OperatorDocument5 pagesInvese Scattering Problem For Perturbed Bi Harmonic OperatorAsim AsrarNo ratings yet
- Henriksson, Exercises For QMDocument25 pagesHenriksson, Exercises For QMhristos314No ratings yet
- Exercises For TFFY54Document25 pagesExercises For TFFY54sattar28No ratings yet
- Econometrics 2012 ExamDocument9 pagesEconometrics 2012 ExamLuca SomigliNo ratings yet
- paperia_2_2023-2Document7 pagespaperia_2_2023-2ayanoaishi1980No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101From EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101No ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Solutions IDocument3 pagesSolutions IaudaciousribbonNo ratings yet
- Lec-5 10StabilityConsistencyandConvergence PDFDocument7 pagesLec-5 10StabilityConsistencyandConvergence PDFaudaciousribbonNo ratings yet
- (2.2) Matrix IdentitiesDocument4 pages(2.2) Matrix IdentitiesaudaciousribbonNo ratings yet
- Solutions IDocument3 pagesSolutions IaudaciousribbonNo ratings yet
- ps206620 3 PDFDocument4 pagesps206620 3 PDFaudaciousribbonNo ratings yet
- Lec-5 10StabilityConsistencyandConvergence PDFDocument7 pagesLec-5 10StabilityConsistencyandConvergence PDFaudaciousribbonNo ratings yet
- Solution 2.1Document3 pagesSolution 2.1audaciousribbonNo ratings yet
- Applying asymptotic methods to complex analysis problemsDocument1 pageApplying asymptotic methods to complex analysis problemsaudaciousribbonNo ratings yet
- Math 209 Assignment 5 SolutionsDocument3 pagesMath 209 Assignment 5 SolutionsaudaciousribbonNo ratings yet
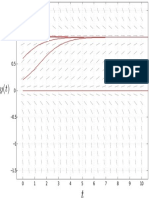
- Slopefield 1Document1 pageSlopefield 1audaciousribbonNo ratings yet
- Summer Semester Student LetterDocument1 pageSummer Semester Student LetteraudaciousribbonNo ratings yet
- Graduate School Online ForumDocument1 pageGraduate School Online ForumaudaciousribbonNo ratings yet
- Math 6410: Ordinary Differential Equations: Lectures Notes OnDocument100 pagesMath 6410: Ordinary Differential Equations: Lectures Notes OnaudaciousribbonNo ratings yet
- Asymptotic Expansion of Integrals: Chee Han Tan Last Modified: April 16, 2017Document19 pagesAsymptotic Expansion of Integrals: Chee Han Tan Last Modified: April 16, 2017audaciousribbonNo ratings yet
- HeaderDocument1 pageHeaderaudaciousribbonNo ratings yet
- Lab 5 Code SuppDocument4 pagesLab 5 Code SuppaudaciousribbonNo ratings yet
- Math Practicetest Q4workedDocument1 pageMath Practicetest Q4workedaudaciousribbonNo ratings yet
- 2020 DA - Berkeley 2019Document140 pages2020 DA - Berkeley 2019audaciousribbonNo ratings yet
- Pres Opportunism GoodDocument25 pagesPres Opportunism GoodaudaciousribbonNo ratings yet
- Graduate School Online ForumDocument1 pageGraduate School Online ForumaudaciousribbonNo ratings yet
- Proliferation Good SamfordDocument50 pagesProliferation Good SamfordJoseph GaylinNo ratings yet
- Disciplinary Decadence Kritique - UNT 2015Document15 pagesDisciplinary Decadence Kritique - UNT 2015audaciousribbonNo ratings yet
- Day 1 - Topic LectureDocument5 pagesDay 1 - Topic LectureaudaciousribbonNo ratings yet
- Backfile - TheoryDocument203 pagesBackfile - TheoryaudaciousribbonNo ratings yet
- Johnson 2015 NDT Finals BallotDocument4 pagesJohnson 2015 NDT Finals BallotaudaciousribbonNo ratings yet
- Really Big Theory Fourth Ed PDFDocument604 pagesReally Big Theory Fourth Ed PDFRitik GoyalNo ratings yet
- JUDGE PHILOSOPHY BOOKLET FOR UIL DEBATE STATE TOURNAMENTDocument42 pagesJUDGE PHILOSOPHY BOOKLET FOR UIL DEBATE STATE TOURNAMENTaudaciousribbonNo ratings yet
- Unit 3 BBA 1ST BMDocument6 pagesUnit 3 BBA 1ST BMRam KrishnaNo ratings yet
- Numerical Method Sol of EqnsDocument30 pagesNumerical Method Sol of Eqnsbhupender ghosliyaNo ratings yet
- Daraga National High School Table of Specification Fourth Quarter Examination Mathematics 7Document2 pagesDaraga National High School Table of Specification Fourth Quarter Examination Mathematics 7Faye LimNo ratings yet
- Insertion SortDocument16 pagesInsertion SortSandra JacobNo ratings yet
- 2022f Chap3hw KLDocument3 pages2022f Chap3hw KLAhiduzzaman AhirNo ratings yet
- MC0074Document2 pagesMC0074dashingvicky15No ratings yet
- Linear Algebra Problems: Gauss Elimination & SystemsDocument3 pagesLinear Algebra Problems: Gauss Elimination & SystemsDanielNo ratings yet
- Lecture 2.2 Merge Sort AlgorithmsDocument59 pagesLecture 2.2 Merge Sort AlgorithmsPablo ChanNo ratings yet
- CE 2201 - Pagcaliwagan, Larra Marie J.Document15 pagesCE 2201 - Pagcaliwagan, Larra Marie J.larraNo ratings yet
- K1-LEVEL QUESTIONS ON OPERATIONS RESEARCH IDocument22 pagesK1-LEVEL QUESTIONS ON OPERATIONS RESEARCH IChirag RokadeNo ratings yet
- Transportation ModelDocument22 pagesTransportation ModelfikruNo ratings yet
- Fem 02Document86 pagesFem 02Manish ShrikhandeNo ratings yet
- QA Assignment 02Document2 pagesQA Assignment 02Markos MelakuNo ratings yet
- Quarter 1 Unit Topic 1: Factoring PolynomialsDocument2 pagesQuarter 1 Unit Topic 1: Factoring PolynomialsHyacinth De LeonNo ratings yet
- COMPLETE Differential Calculus FileDocument161 pagesCOMPLETE Differential Calculus FileasdsadasNo ratings yet
- LPP FinalDocument51 pagesLPP FinalRISHA SHETTYNo ratings yet
- MEC500 Numerical Methods With Applications: Roots of EquationsDocument19 pagesMEC500 Numerical Methods With Applications: Roots of EquationsfatinnurhaziqahNo ratings yet
- IPM SlidesDocument34 pagesIPM SlidesMath DepartmentNo ratings yet
- DFS AND BFS 11 - 12Document8 pagesDFS AND BFS 11 - 12D A N I S HNo ratings yet
- Network Model Aplikasi QM For WindowsDocument5 pagesNetwork Model Aplikasi QM For WindowsJoven CastilloNo ratings yet
- Big-M Two Phase MethodsDocument51 pagesBig-M Two Phase Methodsbits_who_am_iNo ratings yet
- Anand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DDocument12 pagesAnand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DAashishNo ratings yet
- Factoring Review SheetDocument3 pagesFactoring Review SheetEmmaNo ratings yet
- Juan Camilo Alfonso 70990 Programacion DinamicaDocument4 pagesJuan Camilo Alfonso 70990 Programacion DinamicaJuan Camilo AlfonsoNo ratings yet
- Sorting QuestionDocument2 pagesSorting QuestionĐạt Nguyễn Đức TuấnNo ratings yet
- Volume Compression Ratio Determination using Newton Raphson Method and LU DecompositionDocument11 pagesVolume Compression Ratio Determination using Newton Raphson Method and LU DecompositionMaria Charlene Caraos TapiaNo ratings yet
- MATH 313-Advance-Math-for-Engineering (WK-10-to-13) - CRISOSTOMODocument29 pagesMATH 313-Advance-Math-for-Engineering (WK-10-to-13) - CRISOSTOMOkrazy hoomanNo ratings yet
- 1) Derivations - RegressionDocument45 pages1) Derivations - RegressionJesúsNo ratings yet
- X HDX X X X X X X X X X X X PX X X QX X X XXXXX Berootsofthe P X Find The Value of QXQXQXQXQXDocument3 pagesX HDX X X X X X X X X X X X PX X X QX X X XXXXX Berootsofthe P X Find The Value of QXQXQXQXQXBùi Anh QuangNo ratings yet