You might also like
- SystemVerilog for Hardware Description: RTL Design and VerificationFrom EverandSystemVerilog for Hardware Description: RTL Design and VerificationNo ratings yet
- Qualkitdo Bugfinder TorDocument16 pagesQualkitdo Bugfinder TorJanos KovacsNo ratings yet
- PROC FCMP User-Defined Functions: An Introduction to the SAS Function CompilerFrom EverandPROC FCMP User-Defined Functions: An Introduction to the SAS Function CompilerNo ratings yet
- Qualkitdo Codeprover TorDocument16 pagesQualkitdo Codeprover TorJanos KovacsNo ratings yet
- PowerPC Microprocessor Common Hardware Reference Platform: A System ArchitectureFrom EverandPowerPC Microprocessor Common Hardware Reference Platform: A System ArchitectureRating: 4 out of 5 stars4/5 (1)
- Certkitiec Codeprover Workflow PDFDocument35 pagesCertkitiec Codeprover Workflow PDFÍcaro VianaNo ratings yet
- Debugging Systems-on-Chip: Communication-centric and Abstraction-based TechniquesFrom EverandDebugging Systems-on-Chip: Communication-centric and Abstraction-based TechniquesNo ratings yet
- DO Qualification Kit: Polyspace Bug Finder Tool Qualification PlanDocument35 pagesDO Qualification Kit: Polyspace Bug Finder Tool Qualification PlanJanos KovacsNo ratings yet
- Certkitiec Bugfinder TQPDocument33 pagesCertkitiec Bugfinder TQPJanos KovacsNo ratings yet
- Database Benchmarking and Stress Testing: An Evidence-Based Approach to Decisions on Architecture and TechnologyFrom EverandDatabase Benchmarking and Stress Testing: An Evidence-Based Approach to Decisions on Architecture and TechnologyNo ratings yet
- IEC Certification Kit: Polyspace Bug Finder Reference WorkflowDocument32 pagesIEC Certification Kit: Polyspace Bug Finder Reference WorkflowJanos KovacsNo ratings yet
- Qualkitdo Codeprover TFDocument22 pagesQualkitdo Codeprover TFJanos KovacsNo ratings yet
- Designing SCADA Application Software: A Practical ApproachFrom EverandDesigning SCADA Application Software: A Practical ApproachNo ratings yet
- SCP Remote Monitoring of Assets Reference Benchmark: Document Version 1.0 December 2019Document13 pagesSCP Remote Monitoring of Assets Reference Benchmark: Document Version 1.0 December 2019le nguyenNo ratings yet
- DO Qualification Kit: Software Model StandardDocument33 pagesDO Qualification Kit: Software Model StandardÍcaro VianaNo ratings yet
- DO Qualification Kit: Simulink Test™ Tool Qualification PlanDocument30 pagesDO Qualification Kit: Simulink Test™ Tool Qualification PlanAntonio SanchezNo ratings yet
- SQL Server 2019 AlwaysOn: Supporting 24x7 Applications with Continuous UptimeFrom EverandSQL Server 2019 AlwaysOn: Supporting 24x7 Applications with Continuous UptimeNo ratings yet
- XDCDocument116 pagesXDCPham Duc HauNo ratings yet
- IEC Certification Kit: Simulink Design Verifier ISO 26262 Tool Qualification PackageDocument31 pagesIEC Certification Kit: Simulink Design Verifier ISO 26262 Tool Qualification PackageÍcaro VianaNo ratings yet
- Robot Operating System (ROS): The Complete Reference (Volume 6)From EverandRobot Operating System (ROS): The Complete Reference (Volume 6)No ratings yet
- Smart Plant 3D Programming I Labs v7 SP4Document205 pagesSmart Plant 3D Programming I Labs v7 SP4ekempis21100% (5)
- TSMP4002 - SmartPlant 3D Programming II Labs v7 SP4Document267 pagesTSMP4002 - SmartPlant 3D Programming II Labs v7 SP4Lin XiNo ratings yet
- Qualkitdo Codeprover Tor PDFDocument178 pagesQualkitdo Codeprover Tor PDFÍcaro VianaNo ratings yet
- Creo4 m010 Toolkit GSGDocument32 pagesCreo4 m010 Toolkit GSGKBBNo ratings yet
- Qualkitdo SLVNV TQPDocument39 pagesQualkitdo SLVNV TQPJanos Kovacs100% (1)
- DO Qualification Kit: Simulink® Design Verifier™ Tool Operational RequirementsDocument22 pagesDO Qualification Kit: Simulink® Design Verifier™ Tool Operational RequirementsAntonio SanchezNo ratings yet
- DO Qualification Kit: Polyspace Code Prover Tool Qualification PlanDocument43 pagesDO Qualification Kit: Polyspace Code Prover Tool Qualification PlanJanos KovacsNo ratings yet
- Software Requirements Specification: Prepared byDocument5 pagesSoftware Requirements Specification: Prepared byAnurag SilswalNo ratings yet
- Qualkitdo Slci TQPDocument33 pagesQualkitdo Slci TQPJanos KovacsNo ratings yet
- TCG Imp GuideDocument26 pagesTCG Imp GuideSiva Krishna Chowdary AnantapurNo ratings yet
- Factorytalk - CFR21Part11Document34 pagesFactorytalk - CFR21Part11NishithNo ratings yet
- IEC Certification Kit: Polyspace Bug Finder Conformance Demonstration TemplateDocument20 pagesIEC Certification Kit: Polyspace Bug Finder Conformance Demonstration TemplateJanos KovacsNo ratings yet
- Om TRMDocument566 pagesOm TRMSoumya Narayana MukkalaNo ratings yet
- Qualkitdo SLVNV TQPDocument39 pagesQualkitdo SLVNV TQPÍcaro VianaNo ratings yet
- TSMP4001 - SmartPlant 3D Programming I Labs v91Document210 pagesTSMP4001 - SmartPlant 3D Programming I Labs v91Lin XiNo ratings yet
- White Paper: Automating Requirements-Based Testing For DO-178CDocument16 pagesWhite Paper: Automating Requirements-Based Testing For DO-178CMarzieh TavasoliNo ratings yet
- Amqp 0-10Document291 pagesAmqp 0-10ocean.stinger697No ratings yet
- Complete Verification and Validation For DO-178C: Whitepaper - V1.0 2019-10Document20 pagesComplete Verification and Validation For DO-178C: Whitepaper - V1.0 2019-10sasikalaNo ratings yet
- Manage Employee Records SoftwareDocument35 pagesManage Employee Records SoftwareBittu rajNo ratings yet
- Utilities: Quick ReferenceDocument128 pagesUtilities: Quick ReferencekishoreparasaNo ratings yet
- IEC Certification Kit: Simulink Verification and Validation™ ISO 26262 Tool Qualification PackageDocument34 pagesIEC Certification Kit: Simulink Verification and Validation™ ISO 26262 Tool Qualification PackageJanos KovacsNo ratings yet
- Oracle Application Server 10g Administrator GuideDocument497 pagesOracle Application Server 10g Administrator Guidefaceme151No ratings yet
- Preliminary: (MS-PSRP) : Powershell Remoting Protocol SpecificationDocument105 pagesPreliminary: (MS-PSRP) : Powershell Remoting Protocol SpecificationRoss U MartinNo ratings yet
- City CorpDocument12 pagesCity CorpMeghana KumarNo ratings yet
- Apps HrmsDocument887 pagesApps HrmsRohit MohapatraNo ratings yet
- Customizing The Lot Expiration DateDocument6 pagesCustomizing The Lot Expiration DatetenalisNo ratings yet
- User Manual Matlab Datafeed Toolbox 3 eDocument37 pagesUser Manual Matlab Datafeed Toolbox 3 eRodrigo Muñoz LoyolaNo ratings yet
- Cash ManagementDocument349 pagesCash Managementashoksahukar1739No ratings yet
- User Manual Matlab Aerospace ToolboxDocument88 pagesUser Manual Matlab Aerospace ToolboxK Vijay Anand0% (1)
- Edeveloper 9.4 Partitioning Troubleshooting GuideDocument28 pagesEdeveloper 9.4 Partitioning Troubleshooting Guidevenkat1505No ratings yet
- DO Qualification Kit: Plan For Software Aspects of Certification (PSAC)Document65 pagesDO Qualification Kit: Plan For Software Aspects of Certification (PSAC)Ícaro VianaNo ratings yet
- Global Accounting EngineDocument422 pagesGlobal Accounting Engineu4rishi100% (1)
- IEC Certification Kit: Polyspace Code Prover ISO 26262 Tool Qualification PackageDocument37 pagesIEC Certification Kit: Polyspace Code Prover ISO 26262 Tool Qualification PackageÍcaro VianaNo ratings yet
- AlrtrmDocument136 pagesAlrtrmRakesh SharmaNo ratings yet
- Workmgmt 162 SaDocument19 pagesWorkmgmt 162 SaSteven MbejoejackNo ratings yet
- Certkitiec SLDV CDT PDFDocument15 pagesCertkitiec SLDV CDT PDFÍcaro VianaNo ratings yet
- IEC Certification Kit: Simulink Verification and Validation™ ISO 26262 Tool Qualification PackageDocument33 pagesIEC Certification Kit: Simulink Verification and Validation™ ISO 26262 Tool Qualification PackageÍcaro VianaNo ratings yet
- IEC Certification Kit: Simulink PLC Coder™ Conformance Demonstration TemplateDocument21 pagesIEC Certification Kit: Simulink PLC Coder™ Conformance Demonstration TemplateÍcaro VianaNo ratings yet
- Power factor correction and harmonic filtering in electrical plantsDocument62 pagesPower factor correction and harmonic filtering in electrical plantsjumpingjack229No ratings yet
- IEC Certification Kit: Model-Based Design For EN 50128Document31 pagesIEC Certification Kit: Model-Based Design For EN 50128Ícaro VianaNo ratings yet
- IEC Certification Kit: Model-Based Design For IEC 61508Document30 pagesIEC Certification Kit: Model-Based Design For IEC 61508Ícaro VianaNo ratings yet
- IEC Certification Kit: Polyspace Bug Finder Conformance Demonstration TemplateDocument20 pagesIEC Certification Kit: Polyspace Bug Finder Conformance Demonstration TemplateÍcaro VianaNo ratings yet
- IEC Certification Kit: Polyspace Bug Finder Reference WorkflowDocument32 pagesIEC Certification Kit: Polyspace Bug Finder Reference WorkflowJanos KovacsNo ratings yet
- IEC Certification Kit: Model-Based Design For ISO 26262Document31 pagesIEC Certification Kit: Model-Based Design For ISO 26262Ícaro VianaNo ratings yet
- DO Qualification Kit: Simulink Code Inspector™ Tool Operational RequirementsDocument23 pagesDO Qualification Kit: Simulink Code Inspector™ Tool Operational RequirementsÍcaro VianaNo ratings yet
- IEC Certification Kit: Embedded Coder™ Conformance Demonstration TemplateDocument22 pagesIEC Certification Kit: Embedded Coder™ Conformance Demonstration TemplateÍcaro VianaNo ratings yet
- IEC Certification Kit: Embedded Coder™ ISO 26262 Tool Qualification PackageDocument29 pagesIEC Certification Kit: Embedded Coder™ ISO 26262 Tool Qualification PackageÍcaro VianaNo ratings yet
- Drs Template PDFDocument3 pagesDrs Template PDFÍcaro VianaNo ratings yet
- IEC Certification Kit: Polyspace Code Prover ISO 26262 Tool Qualification PackageDocument37 pagesIEC Certification Kit: Polyspace Code Prover ISO 26262 Tool Qualification PackageÍcaro VianaNo ratings yet
- IEC Certification Kit: Polyspace Code Prover Conformance Demonstration TemplateDocument22 pagesIEC Certification Kit: Polyspace Code Prover Conformance Demonstration TemplateÍcaro VianaNo ratings yet
- DO Qualification Kit: Plan For Software Aspects of Certification (PSAC)Document65 pagesDO Qualification Kit: Plan For Software Aspects of Certification (PSAC)Ícaro VianaNo ratings yet
- IEC Certification Kit: Simulink Design Verifier ISO 26262 Tool Qualification PackageDocument31 pagesIEC Certification Kit: Simulink Design Verifier ISO 26262 Tool Qualification PackageÍcaro VianaNo ratings yet
- GenICam License 20072005 PDFDocument11 pagesGenICam License 20072005 PDFÍcaro VianaNo ratings yet
- DO Qualification Kit: Simulink Code Inspector Test Cases, Procedures, and ResultsDocument18 pagesDO Qualification Kit: Simulink Code Inspector Test Cases, Procedures, and ResultsÍcaro VianaNo ratings yet
- Serverstartup PDFDocument6 pagesServerstartup PDFWezda KingstonNo ratings yet
- Qualkitdo Codeprover Tor PDFDocument178 pagesQualkitdo Codeprover Tor PDFÍcaro VianaNo ratings yet
- Simulink PLC Coder™ Release NotesDocument40 pagesSimulink PLC Coder™ Release NotesÍcaro VianaNo ratings yet
- DO Qualification Kit: Software Model StandardDocument33 pagesDO Qualification Kit: Software Model StandardÍcaro VianaNo ratings yet
- Qualkitdo SLVNV TQPDocument39 pagesQualkitdo SLVNV TQPÍcaro VianaNo ratings yet
- PLC STDocument192 pagesPLC STÍcaro VianaNo ratings yet
- Request ProcessDocument3 pagesRequest ProcessrainirajNo ratings yet
- Qualkitdo SLVNV TorDocument40 pagesQualkitdo SLVNV TorÍcaro VianaNo ratings yet
- Edurific Curriculum BrochureDocument20 pagesEdurific Curriculum BrochurerupeshNo ratings yet
- CASS30 Rev 0 - CASS Scheme CertificatesDocument3 pagesCASS30 Rev 0 - CASS Scheme Certificates최재호No ratings yet
- Syllabus 5 - Module 7 - Using The Internet & EmailDocument5 pagesSyllabus 5 - Module 7 - Using The Internet & EmailBalachandran NavaratnasamyNo ratings yet
- Adelphi House: Comverse Globally The Wireless Federation.Document3 pagesAdelphi House: Comverse Globally The Wireless Federation.John Adam St Gang: Crown ControlNo ratings yet
- A Review On Methods, Issues and Challenges in Neuromorphic EngineeringDocument5 pagesA Review On Methods, Issues and Challenges in Neuromorphic Engineeringsyed aslam aliNo ratings yet
- How To Make An Affordable Vein Finder For Use DDocument6 pagesHow To Make An Affordable Vein Finder For Use DMohammed ShabanNo ratings yet
- Hdpe Pipe Systems: Product Catalogue 2019Document112 pagesHdpe Pipe Systems: Product Catalogue 2019David sernaNo ratings yet
- Cutting Edge HACO CNC MachinesDocument9 pagesCutting Edge HACO CNC MachinesJaja SumarjaNo ratings yet
- DSL-2740R Release NoteDocument1 pageDSL-2740R Release Noteel mioNo ratings yet
- Catalogue of International Standards Used in The Petroleum and Natural Gas IndustriesDocument129 pagesCatalogue of International Standards Used in The Petroleum and Natural Gas IndustriesmehranlnjdNo ratings yet
- TEGAM Model 2340/2350 High Voltage Amplifier ManualDocument19 pagesTEGAM Model 2340/2350 High Voltage Amplifier ManualenticoNo ratings yet
- Brochure SolidPlant 3DDocument6 pagesBrochure SolidPlant 3Dkalong malamNo ratings yet
- AE Bulletin For Stand-Alone Digital Controller For RefDocument21 pagesAE Bulletin For Stand-Alone Digital Controller For RefAbdiel MartínezNo ratings yet
- ABB Spec MCB SH200Document2 pagesABB Spec MCB SH200Jirayu KhumwanichNo ratings yet
- Gurpyar (MAIN PROJECT)Document54 pagesGurpyar (MAIN PROJECT)jellymaniNo ratings yet
- Ma 2604000 WMDocument55 pagesMa 2604000 WMCarlos ReyesNo ratings yet
- Muhammad Umair Ismail Mechanical Engineer: Cell Phone: EmailDocument2 pagesMuhammad Umair Ismail Mechanical Engineer: Cell Phone: EmailUmairIsmailNo ratings yet
- (30 Disember) FK Jadual Peperiksaan Akhir Dan Pengawasan Semester 1 Sesi 2022-2023Document3 pages(30 Disember) FK Jadual Peperiksaan Akhir Dan Pengawasan Semester 1 Sesi 2022-2023NazrinNo ratings yet
- Las Activities q2Document3 pagesLas Activities q2Anna Jane AdanNo ratings yet
- Edhard OPERATING AND SERVICE MANUAL MODELS MK, MKH, MKS 6275635Document12 pagesEdhard OPERATING AND SERVICE MANUAL MODELS MK, MKH, MKS 6275635Gustavo SánchezNo ratings yet
- Reg 2015 ECE Curriculum SyllabusDocument152 pagesReg 2015 ECE Curriculum SyllabusRenit AntoNo ratings yet
- ISOM3180 Final Assessment: There Are 8 Broadcast Domains in TotalDocument14 pagesISOM3180 Final Assessment: There Are 8 Broadcast Domains in Total長長No ratings yet
- Case Study 1Document3 pagesCase Study 1ramtwinsmeNo ratings yet
- Automatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002Document36 pagesAutomatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002ase.olgaNo ratings yet
- User Manual 2570817 RRU ZTEDocument24 pagesUser Manual 2570817 RRU ZTEGun TaNo ratings yet
- Relay Circuits With 57 Practical Examples - TESLA INSTITUTEDocument98 pagesRelay Circuits With 57 Practical Examples - TESLA INSTITUTEFoe Aung100% (2)
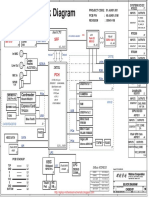
- CADIZ-CP Block Diagram: Intel CPUDocument57 pagesCADIZ-CP Block Diagram: Intel CPUvnenovNo ratings yet
- Axis Statement Kirandeep KaurDocument2 pagesAxis Statement Kirandeep KaurTanvi DhingraNo ratings yet
- NPL Testing Demonstrates The Flir Gf320 Meets Epa Ooooa StandardsDocument2 pagesNPL Testing Demonstrates The Flir Gf320 Meets Epa Ooooa StandardsjimmymorelosNo ratings yet
- Caterpillar 988 Wheel Loader Operators Manual SN 87aDocument6 pagesCaterpillar 988 Wheel Loader Operators Manual SN 87aCarlos Cetina100% (1)