You might also like
- Christmas Guitar SolosDocument36 pagesChristmas Guitar SolosEd Wright100% (6)
- 34 Air Traffic Control SystemDocument24 pages34 Air Traffic Control SystemTarik Benzineb100% (1)
- How To Hack WiFi Cracking WPA2 WPA WiFi Password Aircrack-Ng Step by Step GuideDocument9 pagesHow To Hack WiFi Cracking WPA2 WPA WiFi Password Aircrack-Ng Step by Step GuidewizunuNo ratings yet
- Cost Estimating Manual for Pipelines and Marine Structures: New Printing 1999From EverandCost Estimating Manual for Pipelines and Marine Structures: New Printing 1999Rating: 5 out of 5 stars5/5 (2)
- 01.5G Transport Network Evolution and Deployment (For Technical)Document59 pages01.5G Transport Network Evolution and Deployment (For Technical)mohamed fadl100% (1)
- DBS3900 PDFDocument24 pagesDBS3900 PDFKaue LinkNo ratings yet
- Padang Weather Data 2001-2002Document550 pagesPadang Weather Data 2001-2002Anzil FitriNo ratings yet
- Reporte Actividades Diarias Mecanico 09-11-2022Document128 pagesReporte Actividades Diarias Mecanico 09-11-2022Juan Sebastian Diaz CuadrosNo ratings yet
- Countess Bathory Black MetalDocument8 pagesCountess Bathory Black MetalrafaelNo ratings yet
- Venom - Countess Bathory (Guitar Pro)Document8 pagesVenom - Countess Bathory (Guitar Pro)rafaelNo ratings yet
- Street Slang, Nomad Culture & Custom ItemsDocument3 pagesStreet Slang, Nomad Culture & Custom ItemsSUMAX 1235No ratings yet
- Proposed Leave Master FileDocument38 pagesProposed Leave Master FileTEMS ServicesNo ratings yet
- data-export-video-UV & PV (Nov) FinalDocument125 pagesdata-export-video-UV & PV (Nov) Finalamos amosNo ratings yet
- Gigi Geligi Bayu Brahmana Himma Rifa Gumay Crown Root Bleeding Pocket Crown Root Bleeding Pocket CrownDocument3 pagesGigi Geligi Bayu Brahmana Himma Rifa Gumay Crown Root Bleeding Pocket Crown Root Bleeding Pocket Crownbayu brahmanaNo ratings yet
- Georgia College & State University: Internship Hours LogDocument1 pageGeorgia College & State University: Internship Hours Logapi-509663105No ratings yet
- La Vita Fugge Vision Divine Stream of ConsciousnessDocument13 pagesLa Vita Fugge Vision Divine Stream of ConsciousnessMich Lobo FloresNo ratings yet
- GC-MS analysis of APAAN, P2P and amphetamine compoundsDocument4 pagesGC-MS analysis of APAAN, P2P and amphetamine compoundsSascha KoenenNo ratings yet
- PT ATLANTIS Form Working HourDocument16 pagesPT ATLANTIS Form Working HourmaryamNo ratings yet
- Hasil Tes Santri Baru Pendidikan Integral Hidayatullah Bontang TAHUN 2018Document4 pagesHasil Tes Santri Baru Pendidikan Integral Hidayatullah Bontang TAHUN 2018Fauzi SalamNo ratings yet
- Procurement Capacity AssessmentDocument3 pagesProcurement Capacity AssessmentAnik SahaNo ratings yet
- Screenshot 2023-05-21 at 13.07.48Document3 pagesScreenshot 2023-05-21 at 13.07.48Sergey SekridovNo ratings yet
- Jurnal 2 DK 3 2020.en - Id PDFDocument23 pagesJurnal 2 DK 3 2020.en - Id PDFFiiaNo ratings yet
- Laporan Bulan Agustus 2022Document5 pagesLaporan Bulan Agustus 2022bayu dwi wkNo ratings yet
- General Journal Entries for Purchases, Payments and ReturnsDocument12 pagesGeneral Journal Entries for Purchases, Payments and ReturnsLeila CruzNo ratings yet
- Three BassDocument4 pagesThree Bassshiv962005No ratings yet
- TIP Ga Shop Dec 23Document31 pagesTIP Ga Shop Dec 23Riza AnimationNo ratings yet
- Reporte CP Al 30 DicDocument934 pagesReporte CP Al 30 DicEsteff PVNo ratings yet
- TIP Ga Shop Dec 23 (1) EditedDocument58 pagesTIP Ga Shop Dec 23 (1) EditedRiza AnimationNo ratings yet
- TV Flooring Status in Sylhet RegionDocument22 pagesTV Flooring Status in Sylhet RegionFaizul ShujonNo ratings yet
- FMS Trouble Count Monitoring-2023-AprilDocument10 pagesFMS Trouble Count Monitoring-2023-AprilFIRETECH FDAS OPERATORNo ratings yet
- Wireless ClientDocument30 pagesWireless Clientruijie medanNo ratings yet
- Student Exam Results and GradesDocument5 pagesStudent Exam Results and GradesAli YahyaNo ratings yet
- Laporan Bulan September 2022Document5 pagesLaporan Bulan September 2022bayu dwi wkNo ratings yet
- City Center-II to Biman Bandar Metro Project DrawingDocument1 pageCity Center-II to Biman Bandar Metro Project Drawingashis maityNo ratings yet
- Programación de CortesDocument28 pagesProgramación de Cortescesar89278No ratings yet
- Item-Analysis-Esp7 Second Quarter 1Document1 pageItem-Analysis-Esp7 Second Quarter 1Anthony AlinsodNo ratings yet
- Finance Specialization MarksDocument8 pagesFinance Specialization Marksdasharath nimjeNo ratings yet
- Data Excel SqaDocument15 pagesData Excel SqaMATEO D. PEREZ VASQUEZNo ratings yet
- Tutorial 2Document3 pagesTutorial 2MUZ0622 Muhamad Hafiz Bin HasrunNo ratings yet
- Jochebed's Song - PianoDocument5 pagesJochebed's Song - PianoTouchaphong SrisuwanNo ratings yet
- Iso Cov-19Document24 pagesIso Cov-19HIKMAH RSNo ratings yet
- The Everlasting Guilty Crow - Guitar TABDocument3 pagesThe Everlasting Guilty Crow - Guitar TABVictor Sebastián André Araujo SalvadorNo ratings yet
- Grade 7 Test AnalysisDocument14 pagesGrade 7 Test AnalysisJoyceNo ratings yet
- Result of Fourth Periodical Test ENGLISH 7Document11 pagesResult of Fourth Periodical Test ENGLISH 7Mark JosephNo ratings yet
- Laporan Bulan Juni 2022Document5 pagesLaporan Bulan Juni 2022bayu dwi wkNo ratings yet
- Risk Discipline TM v1Document6 pagesRisk Discipline TM v1Free Latest MoviesNo ratings yet
- Form Daily ReportDocument24 pagesForm Daily ReportAldy YuliNo ratings yet
- Drockon Ballington REALDocument3 pagesDrockon Ballington REALBurnerNo ratings yet
- SudokuDocument30 pagesSudokuVanessaNo ratings yet
- JPS Patient Response Time January 2019Document478 pagesJPS Patient Response Time January 2019ratnaNo ratings yet
- CCTVDocument6 pagesCCTVSyedNo ratings yet
- Absen JuliDocument11 pagesAbsen Julikembarjayakaryagkt2023No ratings yet
- Enter Sandman: E-Gitarre (Tabulatur) 2Document3 pagesEnter Sandman: E-Gitarre (Tabulatur) 2jamesrobertsnz9No ratings yet
- Beverage Inventory (h&s)Document2 pagesBeverage Inventory (h&s)ganeshgupta1432.ggNo ratings yet
- Sensus Juli 2021Document52 pagesSensus Juli 2021Bonita PrimaNo ratings yet
- CGEPB Gab Definitivo 001 1-2008Document1 pageCGEPB Gab Definitivo 001 1-2008luizaNo ratings yet
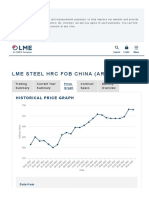
- WWW Lme Com en GB Metals Ferrous HRC FOB China#TabIndex 2Document3 pagesWWW Lme Com en GB Metals Ferrous HRC FOB China#TabIndex 2Karya BangunanNo ratings yet
- Trends VC 311 2020Document1,710 pagesTrends VC 311 2020Muhammad Faris NaufalNo ratings yet
- Canon in C Ukulele: Johann Pachelbel 140Document1 pageCanon in C Ukulele: Johann Pachelbel 140Bukkina FasoNo ratings yet
- Result Term-1 IXADocument1 pageResult Term-1 IXAsujorpdra0No ratings yet
- DiarioDocument12 pagesDiarioIsmael NicolasNo ratings yet
- DIAGRAMA DE ALTURAS CORTE Y RELLENO REV-01 - Con AdecuacionDocument22 pagesDIAGRAMA DE ALTURAS CORTE Y RELLENO REV-01 - Con AdecuacionLuis Miguel Benites ParcoNo ratings yet
- Mathdrills 8Document2 pagesMathdrills 8Yarielis LópezNo ratings yet
- Daftar Inventaris ApdDocument1 pageDaftar Inventaris ApdSukma UtariNo ratings yet
- Lecture12 PDFDocument47 pagesLecture12 PDFEvangelista MaoNo ratings yet
- Quality and Defect Inspection of Green Coffee BeanDocument18 pagesQuality and Defect Inspection of Green Coffee BeanEvangelista MaoNo ratings yet
- Lecture10 PDFDocument54 pagesLecture10 PDFEvangelista MaoNo ratings yet
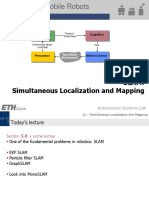
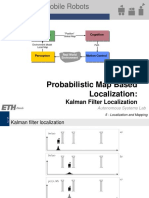
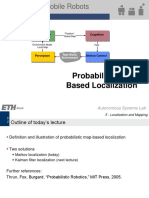
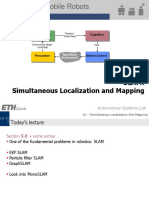
- Autonomous Mobile Robots: Probabilistic Map Based LocalizationDocument18 pagesAutonomous Mobile Robots: Probabilistic Map Based LocalizationEvangelista MaoNo ratings yet
- Lecture8 PDFDocument42 pagesLecture8 PDFEvangelista MaoNo ratings yet
- DIS 11-12 W06 Lecture PDFDocument90 pagesDIS 11-12 W06 Lecture PDFEvangelista MaoNo ratings yet
- Lecture4 PDFDocument71 pagesLecture4 PDFEvangelista MaoNo ratings yet
- Lecture5 PDFDocument70 pagesLecture5 PDFEvangelista MaoNo ratings yet
- DIS 11-12 W07 Lecture PDFDocument64 pagesDIS 11-12 W07 Lecture PDFEvangelista MaoNo ratings yet
- Lecture 11 PDFDocument51 pagesLecture 11 PDFEvangelista MaoNo ratings yet
- DIS 11-12 W04 Lecture PDFDocument67 pagesDIS 11-12 W04 Lecture PDFEvangelista Mao0% (1)
- Biorobotics - Methods & Applications - Barbara Webb & Thomas R. ConsiDocument206 pagesBiorobotics - Methods & Applications - Barbara Webb & Thomas R. Consijuridoc100% (1)
- DIS 11-12 W05 Lecture PDFDocument75 pagesDIS 11-12 W05 Lecture PDFEvangelista MaoNo ratings yet
- Lecture 10 PDFDocument10 pagesLecture 10 PDFEvangelista MaoNo ratings yet
- Lecture 9 PDFDocument26 pagesLecture 9 PDFEvangelista MaoNo ratings yet
- DIS 11-12 W05 Lecture PDFDocument75 pagesDIS 11-12 W05 Lecture PDFEvangelista MaoNo ratings yet
- DIS 11-12 W03 Lecture PDFDocument53 pagesDIS 11-12 W03 Lecture PDFEvangelista MaoNo ratings yet
- 278 - Biomimetics Report Final VersionDocument64 pages278 - Biomimetics Report Final VersionSung Woong KiNo ratings yet
- DIS 11-12 W06 Lecture PDFDocument90 pagesDIS 11-12 W06 Lecture PDFEvangelista MaoNo ratings yet
- DIS 11-12 W03 Lecture PDFDocument53 pagesDIS 11-12 W03 Lecture PDFEvangelista MaoNo ratings yet
- Ni-Timesync: Introduction, Installation, and ConfigurationDocument6 pagesNi-Timesync: Introduction, Installation, and ConfigurationEvangelista MaoNo ratings yet
- Biorobotics - Methods & Applications - Barbara Webb & Thomas R. ConsiDocument206 pagesBiorobotics - Methods & Applications - Barbara Webb & Thomas R. Consijuridoc100% (1)
- DIS 11-12 W04 Lecture PDFDocument67 pagesDIS 11-12 W04 Lecture PDFEvangelista Mao0% (1)
- DIS 11-12 W07 Lecture PDFDocument64 pagesDIS 11-12 W07 Lecture PDFEvangelista MaoNo ratings yet
- The Massachusetts Robotics Revolution: Inspiring Innovation, Driving Growth and Competitiveness in Leading IndustriesDocument40 pagesThe Massachusetts Robotics Revolution: Inspiring Innovation, Driving Growth and Competitiveness in Leading IndustriesEvangelista MaoNo ratings yet
- Icp Release NotesDocument4 pagesIcp Release NotesMita VegaNo ratings yet
- Da Qin Stall GuideDocument52 pagesDa Qin Stall GuidePepe CastilloNo ratings yet
- Narrative ANNIE (Sending Email) : Sound of Fitness Video Playing in BackgroundDocument16 pagesNarrative ANNIE (Sending Email) : Sound of Fitness Video Playing in Backgroundsorinadan100% (1)
- Mobile Robots in JapanDocument9 pagesMobile Robots in JapanEvangelista MaoNo ratings yet
- Li-Fi Technology Transmission of Data Through LightDocument23 pagesLi-Fi Technology Transmission of Data Through LightDegusa Patel100% (1)
- DTMF Decoder Using Matlab DFT and Energy DetectionDocument6 pagesDTMF Decoder Using Matlab DFT and Energy Detectionstephen562001No ratings yet
- Manual Nera Networks Evolution Metro Revize BDocument56 pagesManual Nera Networks Evolution Metro Revize BJohn Wayne100% (2)
- Trueair2 User ManualDocument1 pageTrueair2 User ManualJesus Ruiz MartinNo ratings yet
- Leda AllDocument8 pagesLeda AllJaucafoNo ratings yet
- 3 GSM Voice Quality Influence Factors Troubleshooting Methods and Tools DeliverablesDocument33 pages3 GSM Voice Quality Influence Factors Troubleshooting Methods and Tools DeliverablesRidwan CrraNo ratings yet
- Biquad Filter PDFDocument5 pagesBiquad Filter PDFpcjoshi02No ratings yet
- FrequenciesDocument11 pagesFrequenciesClaudio FrutosNo ratings yet
- THDB - Ada: High-Speed A/D and D/A Development KitDocument24 pagesTHDB - Ada: High-Speed A/D and D/A Development KitZarnescu GeorgeNo ratings yet
- Continuous Waveform Transmission Using USRP LabDocument7 pagesContinuous Waveform Transmission Using USRP LabUmar KhanNo ratings yet
- Assignment CN 1+2 FinalDocument18 pagesAssignment CN 1+2 Finalsunil chaudhariNo ratings yet
- 300-450MHz ASK Receiver DatasheetDocument21 pages300-450MHz ASK Receiver DatasheetBehnam GanjiNo ratings yet
- Simulation and Analysis of Slot-Coupled Patch Antenna at Different Frequencies Using HfssDocument7 pagesSimulation and Analysis of Slot-Coupled Patch Antenna at Different Frequencies Using HfssIAEME PublicationNo ratings yet
- UAV Positioning For Throughput Maximization: Research Open AccessDocument15 pagesUAV Positioning For Throughput Maximization: Research Open AccessAbhishek GuptaNo ratings yet
- R Rec P.1812 1 200910 S!!PDF eDocument31 pagesR Rec P.1812 1 200910 S!!PDF emauweberNo ratings yet
- WCDMA Call Flow PDFDocument22 pagesWCDMA Call Flow PDFmaheshwankhedeNo ratings yet
- Dual Band Antenna SpecsDocument6 pagesDual Band Antenna SpecsKumud2014No ratings yet
- UMTS Network Insight Device CapacityDocument28 pagesUMTS Network Insight Device Capacitykofi_amoako_amoantwiNo ratings yet
- Furuno VHF FM-2721Document2 pagesFuruno VHF FM-2721Allen AnyayahanNo ratings yet
- HXGW OverviewDocument96 pagesHXGW OverviewDony Suryo HandoyoNo ratings yet
- Cdma FundamentalsDocument60 pagesCdma FundamentalsRama KrishnaNo ratings yet
- AirPrime MC7430Document108 pagesAirPrime MC7430sellabiNo ratings yet
- High-Quality Audio Applications Using The PIC32: Author: Jayanth Murthy Madapura Microchip Technology IncDocument16 pagesHigh-Quality Audio Applications Using The PIC32: Author: Jayanth Murthy Madapura Microchip Technology IncAnthony HubbardNo ratings yet
- Topic - 4 - Linear Wire and Small Circular Loop AntennasDocument35 pagesTopic - 4 - Linear Wire and Small Circular Loop AntennasBasem Abd ElazizNo ratings yet
- Unit2-2 MweDocument40 pagesUnit2-2 MweVishnu VardhanNo ratings yet
- HP SondeDocument12 pagesHP SondeNamik HadziibrahimovicNo ratings yet