You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 2 - Finding Roots of Nonlinear EquationsDocument33 pages2 - Finding Roots of Nonlinear EquationsEge UygunturkNo ratings yet
- Lec2 Numerical ModelDocument54 pagesLec2 Numerical ModelNoorLiana Mahmud100% (1)
- Hampiran Numerik Solusi Persamaan Nirlanjar: Pertemuan 3Document29 pagesHampiran Numerik Solusi Persamaan Nirlanjar: Pertemuan 3dikiNo ratings yet
- Ch5 Bracketing - Methods Compatibility ModeDocument37 pagesCh5 Bracketing - Methods Compatibility ModeZaynab MsawatNo ratings yet
- CE304 Unit 2 Lec1 Jumah2018Document17 pagesCE304 Unit 2 Lec1 Jumah2018Abdallah AlhasanNo ratings yet
- Dumaguin Lab Activity 1 Bisection MethodDocument8 pagesDumaguin Lab Activity 1 Bisection Methodangelo dedicatoriaNo ratings yet
- Files/2-Clase Lectures Lecture 5Document10 pagesFiles/2-Clase Lectures Lecture 5hamzarazNo ratings yet
- Calculo Numérico I: Raíces de ecuaciones abiertasDocument29 pagesCalculo Numérico I: Raíces de ecuaciones abiertasandreNo ratings yet
- Ch5 Bracketing Methods Compatibility ModeDocument33 pagesCh5 Bracketing Methods Compatibility ModeQueenNo ratings yet
- CH 2 Solution of Nonlinear EquationsDocument26 pagesCH 2 Solution of Nonlinear EquationsAddisu Safo BoseraNo ratings yet
- Bisection Method for Solving Nonlinear EquationsDocument9 pagesBisection Method for Solving Nonlinear EquationssyazNo ratings yet
- Clase 4 Calculo Numerico IDocument29 pagesClase 4 Calculo Numerico IenriqueNo ratings yet
- Roots of EquationsDocument31 pagesRoots of EquationsGzim RamadaniNo ratings yet
- Part 2Document10 pagesPart 2Sudhagar KingNo ratings yet
- Roots of EquationsDocument108 pagesRoots of Equationschinoi CNo ratings yet
- Part IIDocument42 pagesPart IIAbel TayeNo ratings yet
- BisectionDocument30 pagesBisectionRobelNo ratings yet
- Chapter 5: Roots of Equations - Bracketing Methods: Lesson PlanDocument21 pagesChapter 5: Roots of Equations - Bracketing Methods: Lesson PlanVikneshwaran BalakrishnanNo ratings yet
- LAB#08: Implementation of Code of Bisection Method and Regula-Falsi Method For Solution of Transcendental Equations in MATLABDocument10 pagesLAB#08: Implementation of Code of Bisection Method and Regula-Falsi Method For Solution of Transcendental Equations in MATLABAsad SaeedNo ratings yet
- Lec - 3 Bisection MethodDocument31 pagesLec - 3 Bisection MethodNadia ImranNo ratings yet
- Kuliah Anum-2Document62 pagesKuliah Anum-2Jesse gioNo ratings yet
- Chapter 5: Roots of Equations - Bracketing Methods: Lesson PlanDocument14 pagesChapter 5: Roots of Equations - Bracketing Methods: Lesson PlanAkhii Ezat AmierNo ratings yet
- ANUM 2012 Bracketing MethodsDocument31 pagesANUM 2012 Bracketing MethodsKukuh KurniadiNo ratings yet
- in The Bisection Method: X F X FDocument17 pagesin The Bisection Method: X F X Frenzon272No ratings yet
- C4L2 Bisection MethodsDocument25 pagesC4L2 Bisection MethodsZakwan HanifNo ratings yet
- Week3 Roots of Eqs - BracketingDocument49 pagesWeek3 Roots of Eqs - BracketingPENERBIT ZENITSNo ratings yet
- Finding Roots of Equations Using Numerical MethodsDocument36 pagesFinding Roots of Equations Using Numerical MethodsSafayet AzizNo ratings yet
- T 5 Open MethodsDocument58 pagesT 5 Open Methodsvarunsingh214761No ratings yet
- Computational Lab in Physics: Finding Roots of Nonlinear FunctionsDocument12 pagesComputational Lab in Physics: Finding Roots of Nonlinear Functionsbenefit187No ratings yet
- 02A - RootBracketing Komp Num 01Document23 pages02A - RootBracketing Komp Num 01Mess YeahNo ratings yet
- Nonlinear Equation RootsDocument28 pagesNonlinear Equation RootsWreiniele CosmeNo ratings yet
- CS-110 Computational Engineering Numerical Methods: by A. Avudainayagam Department of MathematicsDocument67 pagesCS-110 Computational Engineering Numerical Methods: by A. Avudainayagam Department of MathematicsShellZeroNo ratings yet
- Nonlinear Equation SolverDocument36 pagesNonlinear Equation Solversupriya kumariNo ratings yet
- 1.4.2 False-Position Method of Solving A Nonlinear EquationDocument5 pages1.4.2 False-Position Method of Solving A Nonlinear EquationGerardoNo ratings yet
- 2 - Bisection Method of Solving A Nonlinear EquationDocument9 pages2 - Bisection Method of Solving A Nonlinear EquationyanyanbahalaNo ratings yet
- Chameli Devi Group of Institutions, Indore: Dr. Ravindra ParsaiDocument55 pagesChameli Devi Group of Institutions, Indore: Dr. Ravindra ParsaiVipul PatelNo ratings yet
- EPE821 Lecture4Document27 pagesEPE821 Lecture4Ihtisham uddinNo ratings yet
- CE206 - Roots of EquationsDocument20 pagesCE206 - Roots of EquationsAwlad AbdullahNo ratings yet
- F (X) Cosh (X) Cos (X) 1Document3 pagesF (X) Cosh (X) Cos (X) 1Getachew FentawNo ratings yet
- Chap02 - 1 - Nonlinear Equs - BisectionFalse-PositionDocument35 pagesChap02 - 1 - Nonlinear Equs - BisectionFalse-PositionaliNo ratings yet
- CH 2 Solution of Nonlinear EquationsDocument24 pagesCH 2 Solution of Nonlinear EquationsAmanuel FekaduNo ratings yet
- ch-2Document16 pagesch-2hailegebreselassie24No ratings yet
- Chapter - Numerical Differentiation, Ordinary Differential Equations (ODE)Document28 pagesChapter - Numerical Differentiation, Ordinary Differential Equations (ODE)Azanaw AsmamawNo ratings yet
- Lecture Notes 7Document18 pagesLecture Notes 7Hussain AldurazyNo ratings yet
- GSC-320 Numerical Computing: Lecturer:Fasiha IkramDocument42 pagesGSC-320 Numerical Computing: Lecturer:Fasiha IkramYunus Sh Mustafa ZanzibarNo ratings yet
- Newton-Raphson Method NotesDocument6 pagesNewton-Raphson Method NotesFilipa FreireNo ratings yet
- C03.01 MEC500RK Roots of Equation - Bracketing MethodDocument28 pagesC03.01 MEC500RK Roots of Equation - Bracketing MethodjuuuunnnnssssNo ratings yet
- 4 Bisection MethodDocument30 pages4 Bisection MethodKenNo ratings yet
- Roots of Equations: Bracketing MethodsDocument30 pagesRoots of Equations: Bracketing MethodsHassaan ShahNo ratings yet
- Roots Open MethodsDocument16 pagesRoots Open MethodsMuhamad Alvan ArdiansyahNo ratings yet
- CBE 250: Computer Applications in Chemical Engineering: Sept 9, 2015 First Finish Bracketing ExampleDocument21 pagesCBE 250: Computer Applications in Chemical Engineering: Sept 9, 2015 First Finish Bracketing ExampleJason ConnorNo ratings yet
- Chapter 2Document20 pagesChapter 2Aradom MehariNo ratings yet
- What Is The Error ? How It Is Happened ?Document24 pagesWhat Is The Error ? How It Is Happened ?Jose D CostaNo ratings yet
- Cos323 s06 Lecture02 RootfindingDocument23 pagesCos323 s06 Lecture02 Rootfindingmissionsk81No ratings yet
- Lecture 5Document26 pagesLecture 5Nanditha ANo ratings yet
- The DerivativeDocument87 pagesThe DerivativeKanwara JaiboonNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- 1) Assignemnt #4-SE102Document2 pages1) Assignemnt #4-SE102AmanNo ratings yet
- Untitled 144Document2 pagesUntitled 144AmanNo ratings yet
- Untitled 124Document2 pagesUntitled 124AmanNo ratings yet
- 123Document5 pages123AmanNo ratings yet
- Lab Assignment 1: Cs Outer InnerDocument2 pagesLab Assignment 1: Cs Outer InnerAmanNo ratings yet
- Solution:: Given IsDocument2 pagesSolution:: Given IsAmanNo ratings yet
- Decoding DTMF: Filters in The Frequency Domain: Laboratory 7Document12 pagesDecoding DTMF: Filters in The Frequency Domain: Laboratory 7Tharindu RukshanNo ratings yet
- Final ReportDocument10 pagesFinal ReportyogeshvgecNo ratings yet
- Cramers Rule 3 by 3 NotesDocument4 pagesCramers Rule 3 by 3 NotesAmanNo ratings yet
- Solution:: Given IsDocument2 pagesSolution:: Given IsAmanNo ratings yet
- More Types: COMP 110Document4 pagesMore Types: COMP 110AmanNo ratings yet
- Solution:: Given IsDocument2 pagesSolution:: Given IsAmanNo ratings yet
- hw06 Solutions PDFDocument5 pageshw06 Solutions PDFRana FaizanNo ratings yet
- More Types: COMP 110Document4 pagesMore Types: COMP 110AmanNo ratings yet
- Sample Final ExamDocument4 pagesSample Final ExamAmanNo ratings yet
- Final20 Spring - 1413059012Document3 pagesFinal20 Spring - 1413059012AmanNo ratings yet
- Four TranDocument19 pagesFour Tranfadicool007No ratings yet
- Objective: % Time (Sampling Freq - 10 HZ) % Amplitude % Frequency % The Command y (Y 0) 0 Removes - Ve ValuesDocument2 pagesObjective: % Time (Sampling Freq - 10 HZ) % Amplitude % Frequency % The Command y (Y 0) 0 Removes - Ve ValuesAmanNo ratings yet
- ECE 203: Introduction To MATLAB Programming Assignment 3 (20 Points)Document2 pagesECE 203: Introduction To MATLAB Programming Assignment 3 (20 Points)Aman0% (1)
- Gravitational Motion: AssignmentDocument6 pagesGravitational Motion: AssignmentAmanNo ratings yet
- PWM ModullationDocument29 pagesPWM ModullationPola RismaNo ratings yet
- Normal, Binomial, Poisson DistributionsDocument12 pagesNormal, Binomial, Poisson DistributionsAmanNo ratings yet
- Aerospace 06 00094Document15 pagesAerospace 06 00094AmanNo ratings yet
- Evaluating Fourier Transforms With MATLABDocument11 pagesEvaluating Fourier Transforms With MATLABAhsan Ratyal100% (1)
- University of Derby: In-Course Assignment SpecificationDocument6 pagesUniversity of Derby: In-Course Assignment SpecificationAmanNo ratings yet
- Chapter 2: Solved Problems ExplainedDocument28 pagesChapter 2: Solved Problems ExplainedAmanNo ratings yet
- Estimation of Formant Frequency of Speech Signal by Linear Prediction Method and Wavelet Transform IJERTV2IS3371Document6 pagesEstimation of Formant Frequency of Speech Signal by Linear Prediction Method and Wavelet Transform IJERTV2IS3371AmanNo ratings yet
- Massachusetts Institute of TechnologyDocument47 pagesMassachusetts Institute of TechnologyAmanNo ratings yet
- NACA Airfoil Performance Analysis of Darrieus Wind TurbineDocument30 pagesNACA Airfoil Performance Analysis of Darrieus Wind TurbineAmanNo ratings yet
- HowToSmartHomeStepbyStep5thEdition 1Document432 pagesHowToSmartHomeStepbyStep5thEdition 1LavkeshKumar83% (6)
- Ais160 MS Office Lesson PlanDocument4 pagesAis160 MS Office Lesson Plan2022191889No ratings yet
- Parties and The Party Systems in India (Chapter 2 - 5) #Toppersnotes - The Twin BrosDocument39 pagesParties and The Party Systems in India (Chapter 2 - 5) #Toppersnotes - The Twin BrosIsha SharmaNo ratings yet
- SMS Based Device Control Using GSM ModemDocument3 pagesSMS Based Device Control Using GSM ModemNikhil Dixit100% (1)
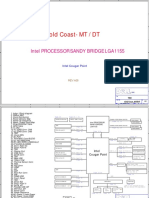
- Dell Optiplex 790 - Gold Coast - MTDT A00 PDFDocument68 pagesDell Optiplex 790 - Gold Coast - MTDT A00 PDFHung KhoiNo ratings yet
- Manual enDocument88 pagesManual enyenorig120No ratings yet
- CS4G Network Simulator GameDocument5 pagesCS4G Network Simulator GameJames Bernard ArriolaNo ratings yet
- Efektivitas Pelayanan Surat Izin Usaha PerdaganganDocument121 pagesEfektivitas Pelayanan Surat Izin Usaha PerdaganganSeluruh Dokumentasi1No ratings yet
- IVONA Voices 2 (10 Voices) NEW! (Cracked) DownloadDocument2 pagesIVONA Voices 2 (10 Voices) NEW! (Cracked) DownloadMegatore6% (16)
- CONTEC08CDocument22 pagesCONTEC08Calistipis2165No ratings yet
- Fpwingr7 Guide e PDFDocument170 pagesFpwingr7 Guide e PDFHNurIqbalNo ratings yet
- Performance Improvement of A Vertical Axis Wind Turbine by Comprehensive Assessment of An Airfoil FamilyDocument15 pagesPerformance Improvement of A Vertical Axis Wind Turbine by Comprehensive Assessment of An Airfoil FamilyJeferson Tondo AlvesNo ratings yet
- Msi Geforce ManualDocument1 pageMsi Geforce ManualAquaLion GGNo ratings yet
- EEL 4783 Lecture 2: Verilog LanguageDocument64 pagesEEL 4783 Lecture 2: Verilog LanguagesalNo ratings yet
- Wireless Turbidity Sensor Node Using PIC16F877A and X-Bee: P.M.Gavhane, P.P. Tadwalkar, V. D. Bachuwar, D.S.SutraveDocument3 pagesWireless Turbidity Sensor Node Using PIC16F877A and X-Bee: P.M.Gavhane, P.P. Tadwalkar, V. D. Bachuwar, D.S.SutraveSou TVNo ratings yet
- اكواد اكستريم XTREAMDocument5 pagesاكواد اكستريم XTREAMLoky 607No ratings yet
- (Case Study) Big Data, Big RewardsDocument2 pages(Case Study) Big Data, Big RewardsHoàng Hải Yến TrầnNo ratings yet
- EN Product Catalogue JABLOTRON - 100+ PDFDocument140 pagesEN Product Catalogue JABLOTRON - 100+ PDFDaz ClaytonNo ratings yet
- Audio and Login Thread LogsDocument23 pagesAudio and Login Thread LogsLy HoNo ratings yet
- Arise Portal Login and Reset GuideDocument9 pagesArise Portal Login and Reset GuideIrene FranzNo ratings yet
- Windows 10 Tips, Tricks & Apps PDFDocument148 pagesWindows 10 Tips, Tricks & Apps PDF@TIK100% (1)
- ADSB RTL SDR Quick StartDocument2 pagesADSB RTL SDR Quick StartCristianNo ratings yet
- Interface ManualDocument424 pagesInterface ManualV CafNo ratings yet
- Illustration NC IIDocument65 pagesIllustration NC IIVictor Moraca SinangoteNo ratings yet
- Design and Analysis of Area and Time Efficient Hred: Hybrid Reduced Deflection Router For Network-On-Chip (Noc)Document45 pagesDesign and Analysis of Area and Time Efficient Hred: Hybrid Reduced Deflection Router For Network-On-Chip (Noc)cecilchinnarajNo ratings yet
- IBM DB2 To PostgreSQL Migration - SQLines ToolsDocument5 pagesIBM DB2 To PostgreSQL Migration - SQLines Toolsgeojava123No ratings yet
- LogDocument38 pagesLogAnite XhaferiNo ratings yet
- cMT3162X Datasheet ENG 2Document2 pagescMT3162X Datasheet ENG 2Gabriel ZamfirNo ratings yet
- Huwuawei - OptiXstar P612E Datasheet PDFDocument3 pagesHuwuawei - OptiXstar P612E Datasheet PDFKy Pham HongNo ratings yet
- Semantic and Contextual Knowledge Representation Using Inter - Lingua For Automated Assessment of Structured C++ ProgramDocument4 pagesSemantic and Contextual Knowledge Representation Using Inter - Lingua For Automated Assessment of Structured C++ ProgramIJAR JOURNALNo ratings yet