You might also like
- Torsen CenterDocument23 pagesTorsen CenterPopescu Vasile IonNo ratings yet
- Datasheet LRMate-200iDDocument1 pageDatasheet LRMate-200iDROBERTO CAMARGONo ratings yet
- PB5-LH Detailed Information - Cam ClutchDocument2 pagesPB5-LH Detailed Information - Cam Clutchari sukantiNo ratings yet
- Linear Actuators JC35D: Data SheetDocument5 pagesLinear Actuators JC35D: Data SheetJULIAN TABARES RESTREPONo ratings yet
- WPS106 6010 WPS 107 7024 Secondary and Post SecondaryDocument1 pageWPS106 6010 WPS 107 7024 Secondary and Post SecondaryahmedNo ratings yet
- PR-03-SERIES - Increment Encoder 38 MMDocument2 pagesPR-03-SERIES - Increment Encoder 38 MMSHARAB IMTIAZNo ratings yet
- CRW02 - Spur Gear - Eng VerDocument54 pagesCRW02 - Spur Gear - Eng VerpruthvirajNo ratings yet
- Genie Z45-25XC PDF Document ENG - 1Document2 pagesGenie Z45-25XC PDF Document ENG - 1Jesus Alejandro Santiago GuillenNo ratings yet
- Gibson G-Force ManualDocument29 pagesGibson G-Force ManualJonnoNo ratings yet
- Catalog Reductor Armonic Cu RulmentiDocument20 pagesCatalog Reductor Armonic Cu RulmentiAkeidirNo ratings yet
- JCB 540 - 170 Stabilizers ComparisonDocument16 pagesJCB 540 - 170 Stabilizers ComparisonDarrenNo ratings yet
- ABB - Siemens Robotics 6 Pole 1 Speed ReslverDocument2 pagesABB - Siemens Robotics 6 Pole 1 Speed ReslverServomotores SimairNo ratings yet
- Lecture 6 - Modelling and Analysis of The Full VehicleDocument57 pagesLecture 6 - Modelling and Analysis of The Full Vehiclehotsync101No ratings yet
- Driveshaft Order Form: Measurement ReferencesDocument2 pagesDriveshaft Order Form: Measurement ReferencesHaytham AjibNo ratings yet
- Cessna 172R exam questions and answersDocument6 pagesCessna 172R exam questions and answersmadhur chaurasiaNo ratings yet
- Simple Gear Train Calculator: Gearagearbgearcgeardgeare Gear F Gear G Gear HDocument5 pagesSimple Gear Train Calculator: Gearagearbgearcgeardgeare Gear F Gear G Gear HAhmed AlhinaiNo ratings yet
- Datasheet M-710iC-45MDocument1 pageDatasheet M-710iC-45MEdgar Ivan BorbollaNo ratings yet
- Conduit Dimensionen CorrectionDocument24 pagesConduit Dimensionen CorrectionRonald LopezNo ratings yet
- Wiring DiagramsDocument4 pagesWiring DiagramsMatthew JoeckelNo ratings yet
- 40 MM Diameter Incremental Rotary Encoders: E40 SeriesDocument2 pages40 MM Diameter Incremental Rotary Encoders: E40 SeriesShahariar HasanNo ratings yet
- TC Tc33xx Specs 6378 TDocument1 pageTC Tc33xx Specs 6378 Tali.almamari.gmNo ratings yet
- Gibson G FORCE User Manual 2.32 Gibson Brands Revision 1.0Document29 pagesGibson G FORCE User Manual 2.32 Gibson Brands Revision 1.0babamiguaNo ratings yet
- STR2 Quick Setup Guide: Wiring The DriveDocument2 pagesSTR2 Quick Setup Guide: Wiring The DriveTharcilo AlmeidaNo ratings yet
- Reference Only!: Operating Range Diagram 2250 SERIES 1, 2, 3Document1 pageReference Only!: Operating Range Diagram 2250 SERIES 1, 2, 3driller27No ratings yet
- Shaft Fork Quote Request FormDocument1 pageShaft Fork Quote Request Formpedro javier carrera juradoNo ratings yet
- Stepper Motor Driver InformationDocument1 pageStepper Motor Driver InformationRoshan MohanNo ratings yet
- HPV1000 JVOP App - Note - 28 PM Guide R1Document8 pagesHPV1000 JVOP App - Note - 28 PM Guide R1m.alfarez87gmail.comNo ratings yet
- Machine Plant AreaDocument5 pagesMachine Plant AreachocoteteNo ratings yet
- Everything You Need to Know About Linear BearingsDocument11 pagesEverything You Need to Know About Linear BearingsTesco toolsNo ratings yet
- Manual Transmision Automatica 6r80 Ford F150 2011-2014Document701 pagesManual Transmision Automatica 6r80 Ford F150 2011-2014Jose Carlos Ochoa lugoNo ratings yet
- Taha Associates. Surface Grinding WheelsDocument2 pagesTaha Associates. Surface Grinding WheelsTaha AssociatesNo ratings yet
- nv427149 1Document10 pagesnv427149 1Shiva KumarNo ratings yet
- Aeroflow Distributor Installation Instructions: Centrifugal Advance CurveDocument6 pagesAeroflow Distributor Installation Instructions: Centrifugal Advance CurveJuston86No ratings yet
- BR300 - Guindaste 30TDocument7 pagesBR300 - Guindaste 30TBruno GonçalvesNo ratings yet
- Sixth-Generation V-Series IGBT Module Application Note - Basic Concept and FeaturesDocument11 pagesSixth-Generation V-Series IGBT Module Application Note - Basic Concept and FeaturesNA MENo ratings yet
- 2 5-Pumps1Document20 pages2 5-Pumps1amir sadighiNo ratings yet
- Tor Qui MetroDocument68 pagesTor Qui MetroVíc Mac IINo ratings yet
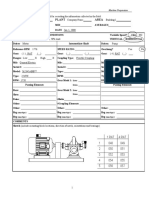
- Inf TecnicasDocument7 pagesInf TecnicasMarceloPolicastroNo ratings yet
- Cessna 172 R by EmailDocument5 pagesCessna 172 R by EmailAshish RanaNo ratings yet
- Projeto 4Document4 pagesProjeto 4Júlio CésarNo ratings yet
- Mooer Oceanmachine EngDocument26 pagesMooer Oceanmachine EngDannyNo ratings yet
- Gears FormulasDocument47 pagesGears FormulasArthanari VaidyanathanNo ratings yet
- Service Manual: No. SEB-83ACEDocument129 pagesService Manual: No. SEB-83ACEThein Htoon lwin100% (3)
- Positions Welding 1625570671Document8 pagesPositions Welding 1625570671Mudassir AliNo ratings yet
- FXJ Maintenance: Grease Up and Others Grease Up and OthersDocument19 pagesFXJ Maintenance: Grease Up and Others Grease Up and Othersshandy bagusNo ratings yet
- Alignment of Steam Turbine Generator CouplingDocument5 pagesAlignment of Steam Turbine Generator CouplinganasNo ratings yet
- NEMA C-FACE Reducers FlexibilityDocument2 pagesNEMA C-FACE Reducers FlexibilityMaisam JdeedNo ratings yet
- Neil Roberts Article On Shock TuningDocument3 pagesNeil Roberts Article On Shock Tuningmav87th-1No ratings yet
- Basic Calculation - PhysicDocument46 pagesBasic Calculation - PhysicjalbartcNo ratings yet
- Complete your panel with L&T digital panel metersDocument176 pagesComplete your panel with L&T digital panel meterssaravananNo ratings yet
- Demag Cranes BruchureDocument24 pagesDemag Cranes BruchureAnand TornekarNo ratings yet
- High-Level Efficiency: Demag Universal CranesDocument24 pagesHigh-Level Efficiency: Demag Universal Cranesyulianus_srNo ratings yet
- H 7L Spec. ComparationDocument1 pageH 7L Spec. Comparationfauzan datasheetNo ratings yet
- Check List Lubrication Point Details 2016 05 04 enDocument1 pageCheck List Lubrication Point Details 2016 05 04 enHesham MahdyNo ratings yet
- Modulo 1 - CorneringDocument34 pagesModulo 1 - CorneringFabiola CovarrubiasNo ratings yet
- Appendix 5.3.1-2a PDFDocument3 pagesAppendix 5.3.1-2a PDFTeddy AndriantsihoaranaNo ratings yet
- Appendix Table A1. Line Styles Used in Geopytool.: Description AppearanceDocument2 pagesAppendix Table A1. Line Styles Used in Geopytool.: Description AppearanceNero ArdinNo ratings yet
- Manual k8024Document13 pagesManual k8024LORVMAXXXLNo ratings yet
- A Manual For Decorative Wood Veneer TechnologyDocument153 pagesA Manual For Decorative Wood Veneer Technologysam dorillo jr.No ratings yet
- 15 NG - PPH Algorithm-Aug08Document1 page15 NG - PPH Algorithm-Aug08Nurkholis AminNo ratings yet
- Na1-Pk5 Na1-5 e CataDocument10 pagesNa1-Pk5 Na1-5 e CataBrian ThompsonNo ratings yet
- TAPES-R Guide October 2011 - To Be Updated PDFDocument10 pagesTAPES-R Guide October 2011 - To Be Updated PDFBrian ThompsonNo ratings yet
- NSK-Linear Guides Standard Items PDFDocument62 pagesNSK-Linear Guides Standard Items PDFBrian ThompsonNo ratings yet
- PH Type Stepping Motors: - $I Ec-If C .TionsDocument1 pagePH Type Stepping Motors: - $I Ec-If C .TionsBrian ThompsonNo ratings yet
- Gait Lab System: The System Must Included Following,: Sr. # Items QtyDocument4 pagesGait Lab System: The System Must Included Following,: Sr. # Items QtyBrian ThompsonNo ratings yet
- SBS Instalment Plans at 0% Markup With No Processing Fee: Terms and ConditionsDocument2 pagesSBS Instalment Plans at 0% Markup With No Processing Fee: Terms and ConditionsBrian ThompsonNo ratings yet
- X5 GT Wiring DiagramDocument2 pagesX5 GT Wiring DiagramBrian Thompson0% (1)
- Assessment CreteriaDocument20 pagesAssessment CreteriaBrian ThompsonNo ratings yet
- UV Data SheetDocument15 pagesUV Data SheetBrian ThompsonNo ratings yet
- UV Lamps Safety TipsDocument9 pagesUV Lamps Safety TipsConstantin DanielNo ratings yet
- IFM Assignment #Document3 pagesIFM Assignment #Brian ThompsonNo ratings yet
- Bank Alfalah's SBS Plans ExplainedDocument2 pagesBank Alfalah's SBS Plans ExplainedBrian ThompsonNo ratings yet
- A Manual For Decorative Wood Veneer TechnologyDocument153 pagesA Manual For Decorative Wood Veneer Technologysam dorillo jr.No ratings yet
- Recent Advances and Trends in Plywood TechnologyDocument76 pagesRecent Advances and Trends in Plywood TechnologyBrian ThompsonNo ratings yet
- Net Metering Guid Lines For ConsumersDocument57 pagesNet Metering Guid Lines For Consumersndm5430No ratings yet
- 3D1 For 13 PlanerDocument32 pages3D1 For 13 PlanerBrian ThompsonNo ratings yet
- Summary of RDocument2 pagesSummary of RBrian ThompsonNo ratings yet
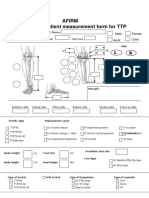
- ALAC Patient measurement formDocument2 pagesALAC Patient measurement formBrian ThompsonNo ratings yet
- Private Label Loyalty App Leaflet 2019 NewDocument15 pagesPrivate Label Loyalty App Leaflet 2019 NewBrian ThompsonNo ratings yet
- Basic Computer Hardware and SoftwareDocument24 pagesBasic Computer Hardware and SoftwareKisarach PhilipsNo ratings yet
- Conflict Management EMBA Group ProjectDocument2 pagesConflict Management EMBA Group ProjectBrian ThompsonNo ratings yet
- Assignment 1 For March 27 17Document2 pagesAssignment 1 For March 27 17Brian ThompsonNo ratings yet
- 2eb04802-c4bb-4112-b54b-cffc2b612d6e.pptxDocument26 pages2eb04802-c4bb-4112-b54b-cffc2b612d6e.pptxBrian ThompsonNo ratings yet
- 701E10 Heating ChamberDocument2 pages701E10 Heating ChamberBrian ThompsonNo ratings yet
- Raheel Abbas MS76Document5 pagesRaheel Abbas MS76Brian ThompsonNo ratings yet
- 2017 Monthly Us Holidays CalendarDocument12 pages2017 Monthly Us Holidays CalendarKhairul RizalNo ratings yet
- Emg ProtocolDocument14 pagesEmg ProtocolBrian ThompsonNo ratings yet
- Catálogo de Automatización y Control Industrial PDFDocument82 pagesCatálogo de Automatización y Control Industrial PDFLeninNo ratings yet
- Layer Cage Quotaion From Poul TechDocument3 pagesLayer Cage Quotaion From Poul TechNasim KurdistanNo ratings yet
- Salford Physics Units Dimensions PosterDocument1 pageSalford Physics Units Dimensions PosterToma Alexandru TiberiuNo ratings yet
- Reyrolle 7PG18 - TR-A High Speed Tripping RelayDocument12 pagesReyrolle 7PG18 - TR-A High Speed Tripping RelayAmaresh NayakNo ratings yet
- Download435 PDFDocument28 pagesDownload435 PDFAlamarumNo ratings yet
- ECT Q&A: Electromagnetic Testing NotesDocument99 pagesECT Q&A: Electromagnetic Testing NotesColin-James Lowe67% (6)
- Lecture 4 Physical LayerDocument38 pagesLecture 4 Physical LayerBatool SajidaNo ratings yet
- Instruction Manual PetDocument37 pagesInstruction Manual PetAbu FadilahNo ratings yet
- 100VA, Rugged, Industrial Quality AC/AC Frequency Converter With Universal AC Input or High DC Input Voltage FC 100-F2 SeriesDocument1 page100VA, Rugged, Industrial Quality AC/AC Frequency Converter With Universal AC Input or High DC Input Voltage FC 100-F2 SeriesWuzekNo ratings yet
- Synchronous Motors and Power Factor CorrectionDocument1 pageSynchronous Motors and Power Factor Correctionashley_moseley1918No ratings yet
- SPIRO PRIME NEET YEAR LONG REPEATERS PROGRAM 2020-2021Document14 pagesSPIRO PRIME NEET YEAR LONG REPEATERS PROGRAM 2020-2021the phoenixNo ratings yet
- 002 p0087 91 Esbd 작업도면 (Rev.i,Full)Document112 pages002 p0087 91 Esbd 작업도면 (Rev.i,Full)Алексей ПетренкоNo ratings yet
- (XRF) Spectrometers and Microanalyzers in Electron Microscopes (Ems)Document8 pages(XRF) Spectrometers and Microanalyzers in Electron Microscopes (Ems)Zahir Rayhan JhonNo ratings yet
- Syllabus - Engineering ElectromagneticsDocument1 pageSyllabus - Engineering ElectromagneticssrihariNo ratings yet
- Architectural Acoustics: Building Utilities 3 - Acoustics and Lighting Systems (Topic 1)Document23 pagesArchitectural Acoustics: Building Utilities 3 - Acoustics and Lighting Systems (Topic 1)Davezel ZerxNo ratings yet
- Test Planner - Lakshya NEET 2024Document3 pagesTest Planner - Lakshya NEET 2024Namrata MondalNo ratings yet
- Air Defense College Antenna Engineering CourseDocument410 pagesAir Defense College Antenna Engineering CourseOsama ElazabNo ratings yet
- Chapter 15 - Molecular Fluorescence SpectrosDocument16 pagesChapter 15 - Molecular Fluorescence Spectrosمحمد طاہر فیضNo ratings yet
- Vacuum Contactor (Hca)Document24 pagesVacuum Contactor (Hca)richardstall2012No ratings yet
- Bosch 800 Plus Series Dishwasher Service Manual PDFDocument189 pagesBosch 800 Plus Series Dishwasher Service Manual PDFKenneth S.75% (4)
- Ftre Class8Document6 pagesFtre Class8Ammu NaniNo ratings yet
- 3RP1505-1BP30 DatasheetDocument7 pages3RP1505-1BP30 DatasheetAngel Dc HinostrozaNo ratings yet
- Fine Structure結報Document7 pagesFine Structure結報aefsfNo ratings yet
- Consumer Electronics: 4 QuarterDocument38 pagesConsumer Electronics: 4 Quarterkuya VehNo ratings yet
- Standing Wave and SWRDocument16 pagesStanding Wave and SWRMichael TeichertNo ratings yet
- Laporan Praktikum IDocument6 pagesLaporan Praktikum IIrfan fajrulNo ratings yet
- Path Profile Analysis of A LOS System Using 3-D Digital MapDocument11 pagesPath Profile Analysis of A LOS System Using 3-D Digital MapJawad HussineNo ratings yet
- Detailed Lesson Plan in Grade 10 Science Strategy: 4a's: The National Center For Teacher EducationDocument26 pagesDetailed Lesson Plan in Grade 10 Science Strategy: 4a's: The National Center For Teacher EducationJustin John DiegorNo ratings yet
- Double Senses. Zero Misses.: About Schneider ElectricDocument2 pagesDouble Senses. Zero Misses.: About Schneider ElectricGeorgeNo ratings yet
- Electrical units of measurment (V,A,Ω,W,... ) PDFDocument7 pagesElectrical units of measurment (V,A,Ω,W,... ) PDFShoaib QuraishiNo ratings yet