You might also like
- Document 71Document6 pagesDocument 71Juan PerezNo ratings yet
- 5dEZR & 9dHER: Premium Antimicrobial RespiratorsDocument2 pages5dEZR & 9dHER: Premium Antimicrobial RespiratorsJuan PerezNo ratings yet
- Slope Stability Considerations in Integrated Surface Mine DesignDocument16 pagesSlope Stability Considerations in Integrated Surface Mine DesignJuan PerezNo ratings yet
- Geotechnical Aspects of Open Stope Design at BHP Cannington: G C StreetonDocument7 pagesGeotechnical Aspects of Open Stope Design at BHP Cannington: G C StreetonJuan PerezNo ratings yet
- NavidBahraniPhDPEng PDFDocument1 pageNavidBahraniPhDPEng PDFJuan PerezNo ratings yet
- 1978 Call 550-PredictionStepPathFailure Call&NicholasDocument8 pages1978 Call 550-PredictionStepPathFailure Call&NicholasJuan PerezNo ratings yet
- Slope Engineering Reference Lists O. Hungr, May, 2008 Landslide ClassificationDocument12 pagesSlope Engineering Reference Lists O. Hungr, May, 2008 Landslide ClassificationJuan PerezNo ratings yet
- Levels of Geotechnical Input For Design - Build ContratcsDocument11 pagesLevels of Geotechnical Input For Design - Build ContratcsJuan PerezNo ratings yet
- 19th On Rock Symposium Mechanics Lake Tahoe, Nevada May 1 3, 1978Document11 pages19th On Rock Symposium Mechanics Lake Tahoe, Nevada May 1 3, 1978Juan PerezNo ratings yet
- 2005 - Ryan - 542-RMSS - Paper 680Document12 pages2005 - Ryan - 542-RMSS - Paper 680Juan PerezNo ratings yet
- 1978 Marek 553-ProbAnalysis-PlaneShearFailureDocument5 pages1978 Marek 553-ProbAnalysis-PlaneShearFailureJuan PerezNo ratings yet
- Preliminary Data Collection For Pit Slope Design: Preli11ti I.1ry FeasiliilitDocument3 pagesPreliminary Data Collection For Pit Slope Design: Preli11ti I.1ry FeasiliilitJuan PerezNo ratings yet
- Government Style Manual, and Have More Than Thirty Years of Experience in WritingDocument21 pagesGovernment Style Manual, and Have More Than Thirty Years of Experience in WritingJuan PerezNo ratings yet
- Open Pit DesignDocument7 pagesOpen Pit DesignJuan PerezNo ratings yet
- MS42 Donald W Taylor CollectionDocument12 pagesMS42 Donald W Taylor CollectionJuan PerezNo ratings yet
- Stereographic Projection Techniques ForDocument2 pagesStereographic Projection Techniques ForJuan PerezNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Owners Manual Air Bike Unlimited Mag 402013Document28 pagesOwners Manual Air Bike Unlimited Mag 402013David ChanNo ratings yet
- Introduction To Atomistic Simulation Through Density Functional TheoryDocument21 pagesIntroduction To Atomistic Simulation Through Density Functional TheoryTarang AgrawalNo ratings yet
- School Based INSET Interim EvaluationDocument8 pagesSchool Based INSET Interim Evaluationprinces arcangelNo ratings yet
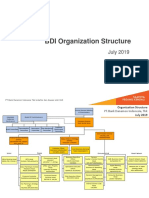
- Bank Danamon Organization ChartDocument4 pagesBank Danamon Organization ChartFaisal Agus NugrahaNo ratings yet
- Ducted Split ACsDocument31 pagesDucted Split ACsHammadZaman100% (1)
- PP Master Data Version 002Document34 pagesPP Master Data Version 002pranitNo ratings yet
- CSE 202.04 Inspection of Concrete StructuresDocument67 pagesCSE 202.04 Inspection of Concrete StructuresJellyn BaseNo ratings yet
- Upes School of Law Lac & Adr Association: PresentsDocument7 pagesUpes School of Law Lac & Adr Association: PresentsSuvedhya ReddyNo ratings yet
- MEd TG G07 EN 04-Oct Digital PDFDocument94 pagesMEd TG G07 EN 04-Oct Digital PDFMadhan GanesanNo ratings yet
- Cam 18 Test 3 ListeningDocument6 pagesCam 18 Test 3 ListeningKhắc Trung NguyễnNo ratings yet
- Instant Download Ebook PDF Ecology Concepts and Applications 8th Edition PDF ScribdDocument41 pagesInstant Download Ebook PDF Ecology Concepts and Applications 8th Edition PDF Scribdsteven.cross256100% (45)
- Back Propagation Neural NetworkDocument10 pagesBack Propagation Neural NetworkAhmad Bisyrul HafiNo ratings yet
- Mathematics Mock Exam 2015Document4 pagesMathematics Mock Exam 2015Ian BautistaNo ratings yet
- Pantalla MTA 100Document84 pagesPantalla MTA 100dariocontrolNo ratings yet
- Editan - Living English (CD Book)Document92 pagesEditan - Living English (CD Book)M Luthfi Al QodryNo ratings yet
- Famous Little Red Book SummaryDocument6 pagesFamous Little Red Book SummaryMatt MurdockNo ratings yet
- 19c Upgrade Oracle Database Manually From 12C To 19CDocument26 pages19c Upgrade Oracle Database Manually From 12C To 19Cjanmarkowski23No ratings yet
- Babe Ruth Saves BaseballDocument49 pagesBabe Ruth Saves BaseballYijun PengNo ratings yet
- CAA Safety Plan 2011 To 2013Document46 pagesCAA Safety Plan 2011 To 2013cookie01543No ratings yet
- Bba VDocument2 pagesBba VkunalbrabbitNo ratings yet
- Eurocode 3: Design of Steel Structures "ReadyDocument26 pagesEurocode 3: Design of Steel Structures "Readywazydotnet80% (10)
- Electronic Spin Inversion: A Danger To Your HealthDocument4 pagesElectronic Spin Inversion: A Danger To Your Healthambertje12No ratings yet
- JFC 180BBDocument2 pagesJFC 180BBnazmulNo ratings yet
- Lab Report SBK Sem 3 (Priscilla Tuyang)Document6 pagesLab Report SBK Sem 3 (Priscilla Tuyang)Priscilla Tuyang100% (1)
- A Noble Noose of Methods - ExtendedDocument388 pagesA Noble Noose of Methods - ExtendedtomasiskoNo ratings yet
- Conservation Assignment 02Document16 pagesConservation Assignment 02RAJU VENKATANo ratings yet
- Research 093502Document8 pagesResearch 093502Chrlszjhon Sales SuguitanNo ratings yet
- To Study Customer Relationship Management in Big BazaarDocument45 pagesTo Study Customer Relationship Management in Big BazaarAbhi KengaleNo ratings yet
- Colorfastness of Zippers To Light: Standard Test Method ForDocument2 pagesColorfastness of Zippers To Light: Standard Test Method ForShaker QaidiNo ratings yet
- Types of Water Pump and Applications in Power Plant.Document6 pagesTypes of Water Pump and Applications in Power Plant.abbas bilalNo ratings yet