You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Brainy kl7 Unit Tests Answer KeyDocument10 pagesBrainy kl7 Unit Tests Answer KeyNatalia Boettcher100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Painting EbookDocument59 pagesPainting EbookHaidar Hero100% (11)
- Concept PaperDocument3 pagesConcept PaperPrincess Trisha Reyes100% (3)
- كلمات في جمل للوجدة الثانيةDocument1 pageكلمات في جمل للوجدة الثانيةHaidar HeroNo ratings yet
- Year: 4 Year Classes Time: Date: 31 /5 / 2016 Subject: CAE Division: Aircraft Engineering Examiner(s) : CAE GroupDocument1 pageYear: 4 Year Classes Time: Date: 31 /5 / 2016 Subject: CAE Division: Aircraft Engineering Examiner(s) : CAE GroupHaidar HeroNo ratings yet
- University of Technology Mechanical Engineering Department First Term Examination 2015/2016Document1 pageUniversity of Technology Mechanical Engineering Department First Term Examination 2015/2016Haidar HeroNo ratings yet
- Q2. For The Stool Shown in Figure Bellow Simulate: A) The Total Deformation and The Equivalent Stress Due To The Applied Load. B) The Buckling Analysis To Determine Load MultiplierDocument1 pageQ2. For The Stool Shown in Figure Bellow Simulate: A) The Total Deformation and The Equivalent Stress Due To The Applied Load. B) The Buckling Analysis To Determine Load MultiplierHaidar HeroNo ratings yet
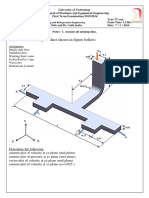
- Simulate Flow Through in Duct Shown in Figure BellowDocument1 pageSimulate Flow Through in Duct Shown in Figure BellowHaidar HeroNo ratings yet
- 3 PDFDocument1 page3 PDFHaidar HeroNo ratings yet
- Simulate Free Convection in The Enclosure Shown in Figure BellowDocument1 pageSimulate Free Convection in The Enclosure Shown in Figure BellowHaidar HeroNo ratings yet
- Simulate Fluid Structure Interaction To Determine The Maximum Stress and Total Deformation Due To Fluid Flow in The Figure Shown BelowDocument1 pageSimulate Fluid Structure Interaction To Determine The Maximum Stress and Total Deformation Due To Fluid Flow in The Figure Shown BelowHaidar HeroNo ratings yet
- For The Candlestick Shown in Figure Bellow, Determine The: Temperature Distribution Due To Thermal LoadDocument1 pageFor The Candlestick Shown in Figure Bellow, Determine The: Temperature Distribution Due To Thermal LoadHaidar HeroNo ratings yet
- For The Figure Shown Below, Simulate Thermal Induced Stress To Determine The Maximum Stress and The Total Deformation Due To Convection Heat TransferDocument1 pageFor The Figure Shown Below, Simulate Thermal Induced Stress To Determine The Maximum Stress and The Total Deformation Due To Convection Heat TransferHaidar HeroNo ratings yet
- For The Geometry Shown in Figure Bellow, Simulate Temperature Distribution Due To Thermal Load Applied On BodyDocument1 pageFor The Geometry Shown in Figure Bellow, Simulate Temperature Distribution Due To Thermal Load Applied On BodyHaidar HeroNo ratings yet
- University of Technology Department of Machines and Equipment Engineering Second Term Examination 2013/2014Document1 pageUniversity of Technology Department of Machines and Equipment Engineering Second Term Examination 2013/2014Haidar HeroNo ratings yet
- Year: 4 Year Classes Time: Date: 2 / 2 / 2016 Subject: CAE Division: Air Conditioning and Refrigeration Engineering Examiner(s) : CAE GroupDocument1 pageYear: 4 Year Classes Time: Date: 2 / 2 / 2016 Subject: CAE Division: Air Conditioning and Refrigeration Engineering Examiner(s) : CAE GroupHaidar HeroNo ratings yet
- Q1. Simulate Thermal in Heat Sink Shown in The Figure Bellow To Determine Temperature DistributionDocument1 pageQ1. Simulate Thermal in Heat Sink Shown in The Figure Bellow To Determine Temperature DistributionHaidar HeroNo ratings yet
- Radar System For 4 Year: Electromechanical Engineering DepartmentDocument13 pagesRadar System For 4 Year: Electromechanical Engineering DepartmentHaidar HeroNo ratings yet
- University of Technology Department of Machines and Equipment Engineering Final Year Examination 2013/2014Document1 pageUniversity of Technology Department of Machines and Equipment Engineering Final Year Examination 2013/2014Haidar HeroNo ratings yet
- Review of Aircraft Fuel System IJARIIE1120 Volume 1 Issue 1 Page 32 38 PDFDocument7 pagesReview of Aircraft Fuel System IJARIIE1120 Volume 1 Issue 1 Page 32 38 PDFHaidar HeroNo ratings yet
- Determine Temperature Distribution of The Part Shown in Figure Below Due To Thermal Load Applied On BodyDocument1 pageDetermine Temperature Distribution of The Part Shown in Figure Below Due To Thermal Load Applied On BodyHaidar HeroNo ratings yet
- Hydraulic Systems Failure, Maintenance and ReparationDocument10 pagesHydraulic Systems Failure, Maintenance and ReparationHaidar HeroNo ratings yet
- Aircraft Stability and Control - Lec02 PDFDocument12 pagesAircraft Stability and Control - Lec02 PDFHaidar HeroNo ratings yet
- Convert ECEF System To Geographic Coordinate System: Experiment No.Document8 pagesConvert ECEF System To Geographic Coordinate System: Experiment No.Haidar HeroNo ratings yet
- تقرير مادة التصميمDocument19 pagesتقرير مادة التصميمHaidar HeroNo ratings yet
- Optimization of Dynamic Vibration Absorbers Based On Equal-Peak TheoryDocument22 pagesOptimization of Dynamic Vibration Absorbers Based On Equal-Peak TheoryHaidar HeroNo ratings yet
- The Evolution of Philippine Housing Policy and InstitutionsDocument6 pagesThe Evolution of Philippine Housing Policy and InstitutionsMharcianeMaxineMagoNo ratings yet
- Music Theraphy AsiDocument109 pagesMusic Theraphy AsimayaerisnaNo ratings yet
- Searchq Boysen Color Chart&tbm Isch&ved 2ahUKEwjktKDt3vr9AhXybDABHQcrDRIQ2-cCegQIABAC&oq Boysen Color &GDocument1 pageSearchq Boysen Color Chart&tbm Isch&ved 2ahUKEwjktKDt3vr9AhXybDABHQcrDRIQ2-cCegQIABAC&oq Boysen Color &GMardieNo ratings yet
- 0 Understand Islam Series - 300 Parts - JaseemkDocument548 pages0 Understand Islam Series - 300 Parts - Jaseemkhafsa abdurahmanNo ratings yet
- Police Licensing ReportDocument10 pagesPolice Licensing ReportAndrew FordNo ratings yet
- Fikriyah Arinal Haq / 12010006/ Term 5/ Management Control Systems Resume Chapter 2 Understanding StrategiesDocument4 pagesFikriyah Arinal Haq / 12010006/ Term 5/ Management Control Systems Resume Chapter 2 Understanding StrategiesVikri Al-hadiNo ratings yet
- Eq EqDocument10 pagesEq Eqyasar110No ratings yet
- Communication Activities Based On Context. Uncontrolled Oral Communication Activities Based On ContextDocument3 pagesCommunication Activities Based On Context. Uncontrolled Oral Communication Activities Based On ContextMaria Ana Patron0% (1)
- Chemical One Act Play 2k19Document16 pagesChemical One Act Play 2k19Roshan Kumar LohaniNo ratings yet
- TOR - Internship HR 2014Document3 pagesTOR - Internship HR 2014TaziaTeresaDarryantoNo ratings yet
- CMS Report 1 PDFDocument13 pagesCMS Report 1 PDFRecordTrac - City of OaklandNo ratings yet
- Week 1 6 Black Schedule DLDocument5 pagesWeek 1 6 Black Schedule DLapi-456880356No ratings yet
- Incorporated in 1995: Add A Footer 1Document18 pagesIncorporated in 1995: Add A Footer 1Yashika ChandraNo ratings yet
- Weekly PoemDocument2 pagesWeekly Poemapi-408283709No ratings yet
- Rewind 2022 - Top 22 Rulings of The Year 2022 (Taxmann)Document17 pagesRewind 2022 - Top 22 Rulings of The Year 2022 (Taxmann)PravinNo ratings yet
- ReviewermidtermsDocument23 pagesReviewermidtermsAlya De villaNo ratings yet
- Prjoect LibraRead Battle of InnovationsDocument20 pagesPrjoect LibraRead Battle of InnovationsJancen L. DenceNo ratings yet
- Recruitment and SelectionDocument23 pagesRecruitment and SelectionPruthvi PrakashaNo ratings yet
- How To Use PATS Module Initialization FunctionDocument5 pagesHow To Use PATS Module Initialization FunctionBogdan Constantin AntonescuNo ratings yet
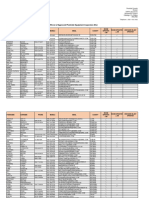
- Listof Approved Pesticide Equipment Inspectors 211123231123Document4 pagesListof Approved Pesticide Equipment Inspectors 211123231123jimhuanggNo ratings yet
- The Culture of ProfessionalismDocument369 pagesThe Culture of Professionalismracan19No ratings yet
- Cleft Lip & PalateDocument33 pagesCleft Lip & PalatedyahNo ratings yet
- Snack & Drink Vending MachinesDocument14 pagesSnack & Drink Vending MachinesAbel TeferaNo ratings yet
- IP Subnetting: Shahzad Rashid NOC Executive Engineer (TXN) Telenor PakistanDocument14 pagesIP Subnetting: Shahzad Rashid NOC Executive Engineer (TXN) Telenor PakistanShahzad RashidNo ratings yet
- Unesco Als Ls1 English m05 (v1.2)Document62 pagesUnesco Als Ls1 English m05 (v1.2)als midsayap150% (2)
- Student Exploration: Distance-Time Graphs: Hugo Zaldivar 10/6/21Document6 pagesStudent Exploration: Distance-Time Graphs: Hugo Zaldivar 10/6/21Hugo ZaldivarNo ratings yet
- Detailed Index - 2015: Sl. No. Government Order/ Registrar'Circular No. and Date Subject Page NoDocument9 pagesDetailed Index - 2015: Sl. No. Government Order/ Registrar'Circular No. and Date Subject Page NokalkibookNo ratings yet
- Class XII English Poem-2 Extract &QADocument7 pagesClass XII English Poem-2 Extract &QAsr2021No ratings yet