You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- DPWH Do 056 S2005Document20 pagesDPWH Do 056 S2005B R Paul FortinNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- EGT001 Roller Bearings Lubrication TrainingDocument10 pagesEGT001 Roller Bearings Lubrication TrainingJom BonhayagNo ratings yet
- Steam Boiler Litt ReviewDocument4 pagesSteam Boiler Litt ReviewToMem33% (3)
- PGT005 Control Valves TrainingDocument12 pagesPGT005 Control Valves TrainingJom BonhayagNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Residential Building Design Using Excel Program FinalDocument22 pagesResidential Building Design Using Excel Program FinalManohar VangaNo ratings yet
- EAMCET Formula in Physics1Document66 pagesEAMCET Formula in Physics1MOHAMMED ASIF100% (4)
- Composites TestingDocument29 pagesComposites TestingThiru MoorthyNo ratings yet
- LAB 5 Buckling and Structural Stability Under CompressionDocument11 pagesLAB 5 Buckling and Structural Stability Under CompressionYousif SaidNo ratings yet
- Application Form CSHprogramDocument6 pagesApplication Form CSHprogramJom Bonhayag100% (2)
- 2007 NZSEE - Priesteley. Calvi, Kowalski-Direct Displacement-Based Seismic Design of StructuresDocument23 pages2007 NZSEE - Priesteley. Calvi, Kowalski-Direct Displacement-Based Seismic Design of StructuresIlie Cristian TiberiusNo ratings yet
- Experimental Methods in Marine DynamicsDocument182 pagesExperimental Methods in Marine DynamicsMULLAI100% (1)
- Pneumatic Conveying CalcsDocument8 pagesPneumatic Conveying CalcsClarence AG YueNo ratings yet
- Position Title: NDT TechnicianDocument1 pagePosition Title: NDT TechnicianJom BonhayagNo ratings yet
- Turbine LP Blade Inspection PDFDocument2 pagesTurbine LP Blade Inspection PDFJom BonhayagNo ratings yet
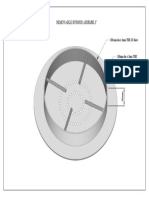
- Removable Burner Assembly: 200 MM Dia X 2mm THK GI SheetDocument1 pageRemovable Burner Assembly: 200 MM Dia X 2mm THK GI SheetJom BonhayagNo ratings yet
- Company Logo: ME 198: Industrial Plant EngineeringDocument1 pageCompany Logo: ME 198: Industrial Plant EngineeringJom BonhayagNo ratings yet
- HeatDocument10 pagesHeatJom BonhayagNo ratings yet
- Pump Selection Condensate Pump: Deaerator Pressure With 10% Allowance Assuming Piping Pressure DropDocument3 pagesPump Selection Condensate Pump: Deaerator Pressure With 10% Allowance Assuming Piping Pressure DropJom BonhayagNo ratings yet
- Online Trading TutorialDocument18 pagesOnline Trading TutorialJom BonhayagNo ratings yet
- Content: SKF Spindle Assessment Quick Start User GuideDocument10 pagesContent: SKF Spindle Assessment Quick Start User GuideJom BonhayagNo ratings yet
- Tech Sheet 128Document1 pageTech Sheet 128Sriram RamanujamNo ratings yet
- The ISO 13381-1 Standard's Failure Prognostics Process Through An ExampleDocument12 pagesThe ISO 13381-1 Standard's Failure Prognostics Process Through An ExampleJom BonhayagNo ratings yet
- PGT001 In-Line Filter TrainingDocument9 pagesPGT001 In-Line Filter TrainingJom BonhayagNo ratings yet
- Appendix A Exercise 10Document1 pageAppendix A Exercise 10Jom BonhayagNo ratings yet
- Project: Sprinkler System For Ash Pond Dust Supression DATE: MAY 10, 2016Document2 pagesProject: Sprinkler System For Ash Pond Dust Supression DATE: MAY 10, 2016Jom BonhayagNo ratings yet
- Examples in Thermodynamics Problems - W. R. CrawfordDocument71 pagesExamples in Thermodynamics Problems - W. R. CrawfordJom BonhayagNo ratings yet
- Chapter Four: Bond, Anchorage and Development LengthDocument31 pagesChapter Four: Bond, Anchorage and Development LengthMintesnot WondimuNo ratings yet
- Bs en 16681 2016Document88 pagesBs en 16681 2016Yasin ArslanNo ratings yet
- Course Outline Phy 193Document9 pagesCourse Outline Phy 193Akemi KeiNo ratings yet
- Mechanics 1Document2 pagesMechanics 1Eunice FiecasNo ratings yet
- The History of Geotechnical Centrifuge Modeling in RussiaDocument4 pagesThe History of Geotechnical Centrifuge Modeling in RussiaManuelNo ratings yet
- CE ELECT 3S Module 3.2 - Horizontal Distribution of Shear - Part 1Document23 pagesCE ELECT 3S Module 3.2 - Horizontal Distribution of Shear - Part 1Charey CamaraoNo ratings yet
- Flexural Test of Concrete Beam SpecimenDocument6 pagesFlexural Test of Concrete Beam SpecimenJenevive TumacderNo ratings yet
- Machine Design & CAD - Lecture 2Document18 pagesMachine Design & CAD - Lecture 2Adil KhawajaNo ratings yet
- SFD & BMDDocument21 pagesSFD & BMDnacot58559No ratings yet
- 4.1 Oscillations: Name: - Class: - Due DateDocument7 pages4.1 Oscillations: Name: - Class: - Due DateShankara Lakshmi GanapathyNo ratings yet
- Builtup Beam - Four AnglesDocument2 pagesBuiltup Beam - Four Anglesraghav abudhabiNo ratings yet
- Lorentz Force - WikipediaDocument17 pagesLorentz Force - Wikipediaagniva dattaNo ratings yet
- Chaotic Vibration Analysis of Rotating, Flexible, Continuous Shaft-Disk System With A Rub-Impact Between The Disk and The Stator PDFDocument17 pagesChaotic Vibration Analysis of Rotating, Flexible, Continuous Shaft-Disk System With A Rub-Impact Between The Disk and The Stator PDFmohdsolihat1No ratings yet
- Flowchart 3-Rev1-Equivalent Lateral Force ProcedureDocument9 pagesFlowchart 3-Rev1-Equivalent Lateral Force ProcedurejxsnyderNo ratings yet
- Concrete Frame Design Manual: Eurocode 2-2004Document76 pagesConcrete Frame Design Manual: Eurocode 2-2004Julian Felipe Beltran MonteroNo ratings yet
- 13.6 Work-Kinetic Energy Theorem: W F DX MVDocument3 pages13.6 Work-Kinetic Energy Theorem: W F DX MVsreejitha KNo ratings yet
- Topic 10.2 Formative AHL SDocument3 pagesTopic 10.2 Formative AHL SJakeNo ratings yet
- Momentum Physic Lab ReportDocument8 pagesMomentum Physic Lab Reportapi-341133750100% (1)
- Hydraulic Jump Reportt Excel FileDocument12 pagesHydraulic Jump Reportt Excel FileMajorNo ratings yet
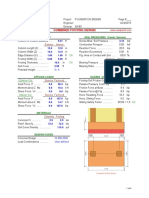
- Combined Footing Design: ASDIP Foundation 3.2.2Document4 pagesCombined Footing Design: ASDIP Foundation 3.2.2Anish NeupaneNo ratings yet
- Unit 4 - Week 3: Assignment 3Document3 pagesUnit 4 - Week 3: Assignment 3AKASH MAURYANo ratings yet
- Leaving Cert Physics Mechanics Long QuestionsDocument16 pagesLeaving Cert Physics Mechanics Long Questionsnicky1213aNo ratings yet