You might also like
- Catapults and Projectile Motion ProjectDocument14 pagesCatapults and Projectile Motion Projectapi-544645898No ratings yet
- Zoltan Kovecses-Where Metaphors Come From - Reconsidering Context in Metaphor-Oxford University Press (2015)Document233 pagesZoltan Kovecses-Where Metaphors Come From - Reconsidering Context in Metaphor-Oxford University Press (2015)Jonathan Almeida92% (13)
- HKUST COMP3211 Quiz1 SolutionDocument6 pagesHKUST COMP3211 Quiz1 SolutionTKFNo ratings yet
- Student Workbook - Unit 2 - Understanding NumberDocument16 pagesStudent Workbook - Unit 2 - Understanding Numberapi-232099327100% (1)
- Jinkun Liu - Intelligent Control Design and MatLab Simulation (2018, Springer)Document294 pagesJinkun Liu - Intelligent Control Design and MatLab Simulation (2018, Springer)snri0da9100% (1)
- Boundary-Value Problems ExplainedDocument10 pagesBoundary-Value Problems ExplainedTan CheehouNo ratings yet
- Unit 1 First and Higher Order Equations: Structure Page NoDocument35 pagesUnit 1 First and Higher Order Equations: Structure Page NoJAGANNATH PRASADNo ratings yet
- MATH 2930 - Worksheet 14 SolutionsDocument5 pagesMATH 2930 - Worksheet 14 SolutionsBrimwoodboyNo ratings yet
- Higher-Order Differential EquationsDocument24 pagesHigher-Order Differential EquationsLief Deltora100% (1)
- Topic 9b: Second Order Differential EquationsDocument8 pagesTopic 9b: Second Order Differential EquationsyyyNo ratings yet
- 4.4.2 Finding A Particular Integral: P Is A PolynomialDocument3 pages4.4.2 Finding A Particular Integral: P Is A PolynomialVeeramanikandan RNo ratings yet
- Homogeneous Linear DE Group 5Document14 pagesHomogeneous Linear DE Group 5Jhon Mar BencionNo ratings yet
- MATH 2930 - Worksheet 9 SolutionsDocument3 pagesMATH 2930 - Worksheet 9 SolutionsBrimwoodboyNo ratings yet
- CH 10.1: Two-Point Boundary Value ProblemsDocument19 pagesCH 10.1: Two-Point Boundary Value ProblemsMona AliNo ratings yet
- 1 The First (Dirichlet) Eigenvalue ProblemDocument12 pages1 The First (Dirichlet) Eigenvalue ProblemNAEEMNo ratings yet
- CE 403 Lecture 9Document4 pagesCE 403 Lecture 9ZiyouNo ratings yet
- Linear Secondorder General (1) .PsDocument9 pagesLinear Secondorder General (1) .PsstevenelimillerNo ratings yet
- Ch4 PDFDocument76 pagesCh4 PDF王大洋No ratings yet
- Boundary Value Problems Part 1Document20 pagesBoundary Value Problems Part 1david219125No ratings yet
- Solutions To Homework: Section 10.1Document2 pagesSolutions To Homework: Section 10.1Sabajonhsons SmithNo ratings yet
- Differential Equations ExplainedDocument5 pagesDifferential Equations ExplainedTOI 1802No ratings yet
- M 234 - T W L I: ATH HE Ronskian AND Inear NdependenceDocument4 pagesM 234 - T W L I: ATH HE Ronskian AND Inear Ndependenceप्रशान्त हमाल ठकुरीNo ratings yet
- Cola TCM - MergedDocument9 pagesCola TCM - MergedJoão Victor ManoelNo ratings yet
- CH03 Pass02Document99 pagesCH03 Pass02DamonMagdaliNo ratings yet
- Week1-Diffusion-SolutionsDocument10 pagesWeek1-Diffusion-SolutionszeliawillscumbergNo ratings yet
- Higher Order Differential EquationsDocument7 pagesHigher Order Differential EquationsAmeer AbbasNo ratings yet
- Lesson2-2 (2) - 2 PDFDocument11 pagesLesson2-2 (2) - 2 PDFHugo NavaNo ratings yet
- Sturm-Liouville Problems: Generalized Fourier Series: X X (0) 0, X (L) 0Document13 pagesSturm-Liouville Problems: Generalized Fourier Series: X X (0) 0, X (L) 0Sebastian ReguanNo ratings yet
- Potential Equation SolutionDocument8 pagesPotential Equation Solutionvamsi_1990No ratings yet
- Student Lecture 24 Homogeneous Second Order ODEsDocument6 pagesStudent Lecture 24 Homogeneous Second Order ODEsuploadingpersonNo ratings yet
- DE Ch21Document20 pagesDE Ch21Hussam AgabNo ratings yet
- Lesson 6. Non Homogenous Equation Undetermined CoefficientsDocument7 pagesLesson 6. Non Homogenous Equation Undetermined CoefficientsAnne TagaoNo ratings yet
- Math2065: Intro To Pdes Tutorial Solutions (Week 1) : 3t 5 (1 Z) 3t 3t 4 3 3tDocument3 pagesMath2065: Intro To Pdes Tutorial Solutions (Week 1) : 3t 5 (1 Z) 3t 3t 4 3 3tTOM DAVISNo ratings yet
- MATH 4: Solving Differential EquationsDocument7 pagesMATH 4: Solving Differential EquationsHoney Roselle MorenoNo ratings yet
- An Introduction to Differential Equations: Basic Concepts, ODE vs PDE, Order of a Differential Equation, Examples, and Linear Differential EquationsDocument97 pagesAn Introduction to Differential Equations: Basic Concepts, ODE vs PDE, Order of a Differential Equation, Examples, and Linear Differential EquationsAltammar13100% (1)
- Linear Homogeneous Boundary Value Problems: Dr. P. DhanumjayaDocument19 pagesLinear Homogeneous Boundary Value Problems: Dr. P. DhanumjayapurijatinNo ratings yet
- Part I Problems and Solutions: Problem 1: y SolutionDocument6 pagesPart I Problems and Solutions: Problem 1: y Solutiontri cutNo ratings yet
- ALGEBRA-1 FullDocument13 pagesALGEBRA-1 FullRaman SharmaNo ratings yet
- Solution Manual For Advanced Engineering Mathematics 8Th Edition Oneil 1305635159 9781305635159 Full Chapter PDFDocument36 pagesSolution Manual For Advanced Engineering Mathematics 8Th Edition Oneil 1305635159 9781305635159 Full Chapter PDFrose.carvin242100% (10)
- Statistical Inference Guide for Engineers and Data ScientistsDocument12 pagesStatistical Inference Guide for Engineers and Data ScientistsJashaswini bhuyanNo ratings yet
- Lecture1 With ExamplesDocument6 pagesLecture1 With ExamplesBree ElaineNo ratings yet
- MAS 201 Spring 2021 (CD) Chapter 3 Higher-Order Differential EquationsDocument23 pagesMAS 201 Spring 2021 (CD) Chapter 3 Higher-Order Differential EquationsBlue horseNo ratings yet
- Euler EquationsDocument8 pagesEuler EquationsShimaa MohammedNo ratings yet
- Solution Manual For Advanced Engineering Mathematics Si Edition 8Th Edition Oneil 1337274526 9781337274524 Full Chapter PDFDocument36 pagesSolution Manual For Advanced Engineering Mathematics Si Edition 8Th Edition Oneil 1337274526 9781337274524 Full Chapter PDFrose.carvin242100% (12)
- Linear Second Order Ode: Differential EquationsDocument36 pagesLinear Second Order Ode: Differential EquationsThurkhesan MuruganNo ratings yet
- 19 SeperableequationsDocument5 pages19 SeperableequationsIco PangilinanNo ratings yet
- Eigenvalue Problems (ODE) Sturm-Liouville ProblemsDocument21 pagesEigenvalue Problems (ODE) Sturm-Liouville Problemshoungjunhong03No ratings yet
- Lectures 12Document16 pagesLectures 12Omed. HNo ratings yet
- M257 316 2012 Lecture 24Document6 pagesM257 316 2012 Lecture 24Jose FuentesNo ratings yet
- dm_ms205 (4)Document14 pagesdm_ms205 (4)Doente PedroNo ratings yet
- 19.1 Second-Order Euler EquationsDocument14 pages19.1 Second-Order Euler EquationsDILESH2_kNo ratings yet
- Ordinary Differential Equation2008Document70 pagesOrdinary Differential Equation2008Tedros AssefaNo ratings yet
- Some Wronskian SDocument7 pagesSome Wronskian SManish AcharyyaNo ratings yet
- Chapter 02Document34 pagesChapter 02許博翔No ratings yet
- Notes 3Document8 pagesNotes 3Sriram BalasubramanianNo ratings yet
- Advanced Engineering Mathematics SI Edition 8th Edition ONeil Solutions Manual DownloadDocument13 pagesAdvanced Engineering Mathematics SI Edition 8th Edition ONeil Solutions Manual DownloadCecil Lombardo100% (22)
- 1 Indeterminate Forms: Jiwen HeDocument7 pages1 Indeterminate Forms: Jiwen HeArif AmancioNo ratings yet
- 2nd Order Differential EquationDocument4 pages2nd Order Differential EquationHari VarshanNo ratings yet
- Art 066Document6 pagesArt 066israel villarrealNo ratings yet
- Chapter 2 - 2nd Order Differential Equations PDFDocument85 pagesChapter 2 - 2nd Order Differential Equations PDFAsad HafudhNo ratings yet
- Initial Value ProblemsDocument8 pagesInitial Value ProblemsFernando SotoNo ratings yet
- Solve second-order Euler equationsDocument14 pagesSolve second-order Euler equationsMunir AslamNo ratings yet
- Ode 2nd MathDocument22 pagesOde 2nd MathEndalew DejeneNo ratings yet
- HOLDEDocument12 pagesHOLDEArvin James DagtaNo ratings yet
- Network Layer Services and FunctionsDocument20 pagesNetwork Layer Services and FunctionsMasood ChoudaryNo ratings yet
- Anx-A Date Sheet Final Exam Spring Semester 2021 - Ug Courses QASID COMPLEX (5 - 10 Jul 2021)Document1 pageAnx-A Date Sheet Final Exam Spring Semester 2021 - Ug Courses QASID COMPLEX (5 - 10 Jul 2021)Masood ChoudaryNo ratings yet
- AccountabilityDocument32 pagesAccountabilityMasood ChoudaryNo ratings yet
- Lec 4 - Network Layer - III - Internet ProtocolDocument36 pagesLec 4 - Network Layer - III - Internet ProtocolMasood ChoudaryNo ratings yet
- Challenges in Provincial AutonomyDocument36 pagesChallenges in Provincial Autonomyali shonNo ratings yet
- Challenges in Implementing Provincial AutonomyDocument40 pagesChallenges in Implementing Provincial AutonomyRania AbdullahNo ratings yet
- Accountability Structures: A Comparative Analysis, Citizens' Periodic Reports On The Performance of State Institutions by Pakistan..Document27 pagesAccountability Structures: A Comparative Analysis, Citizens' Periodic Reports On The Performance of State Institutions by Pakistan..nauman ahmadNo ratings yet
- Accountability Structures: A Comparative Analysis, Citizens' Periodic Reports On The Performance of State Institutions by Pakistan..Document27 pagesAccountability Structures: A Comparative Analysis, Citizens' Periodic Reports On The Performance of State Institutions by Pakistan..nauman ahmadNo ratings yet
- AccountabilityDocument32 pagesAccountabilityMasood ChoudaryNo ratings yet
- Challenges in Provincial AutonomyDocument36 pagesChallenges in Provincial Autonomyali shonNo ratings yet
- AccountabilityDocument32 pagesAccountabilityMasood ChoudaryNo ratings yet
- Challenges in Implementing Provincial AutonomyDocument40 pagesChallenges in Implementing Provincial AutonomyRania AbdullahNo ratings yet
- AccountabilityDocument32 pagesAccountabilityMasood ChoudaryNo ratings yet
- A Measured Approach To End PovertyDocument71 pagesA Measured Approach To End PovertyMasood ChoudaryNo ratings yet
- IsometricDocument59 pagesIsometricMasood ChoudaryNo ratings yet
- Applications in Ch1Document7 pagesApplications in Ch1Aleep YoungBaeNo ratings yet
- A Measured Approach To End PovertyDocument71 pagesA Measured Approach To End PovertyMasood ChoudaryNo ratings yet
- HF PDFDocument1 pageHF PDFMasood ChoudaryNo ratings yet
- Six Books of HadithDocument20 pagesSix Books of HadithMasood ChoudaryNo ratings yet
- Pakistan AffairsDocument81 pagesPakistan AffairsFarooq HassanNo ratings yet
- Lec1 PDFDocument24 pagesLec1 PDFMasood ChoudaryNo ratings yet
- Student ID 00000259263 Student ID 00000259263 Student ID 00000259263Document1 pageStudent ID 00000259263 Student ID 00000259263 Student ID 00000259263Masood ChoudaryNo ratings yet
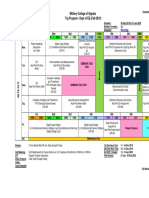
- Military College Signals Fall 2019 Course ScheduleDocument1 pageMilitary College Signals Fall 2019 Course ScheduleMasood ChoudaryNo ratings yet
- Military College Signals Fall 2019 Course ScheduleDocument1 pageMilitary College Signals Fall 2019 Course ScheduleMasood ChoudaryNo ratings yet
- FINAL REPORT (L ND M)Document84 pagesFINAL REPORT (L ND M)MuzamilNo ratings yet
- Edexcel Physics IGCSE Forces and Motion Revision NotesDocument8 pagesEdexcel Physics IGCSE Forces and Motion Revision NotesdilsharakaviNo ratings yet
- Postulates of Quantum MechanicsDocument7 pagesPostulates of Quantum MechanicsBenjaminLloydNo ratings yet
- DCF Analysis PDFDocument11 pagesDCF Analysis PDFanandbajaj0No ratings yet
- Data Preparation: KIT306/606: Data Analytics A/Prof. Quan Bai University of TasmaniaDocument49 pagesData Preparation: KIT306/606: Data Analytics A/Prof. Quan Bai University of TasmaniaJason ZengNo ratings yet
- Budget LineDocument6 pagesBudget Linegyan|_vermaNo ratings yet
- Zorn's Lemma PDFDocument2 pagesZorn's Lemma PDFdiabetusNo ratings yet
- Allen: Pre-Nurture CourseDocument3 pagesAllen: Pre-Nurture CourseAshrithNo ratings yet
- Fta TutorialDocument21 pagesFta Tutorialpj_chaudhary3796No ratings yet
- Reflection WorksheetDocument2 pagesReflection WorksheetRaghad AbdallaNo ratings yet
- Multivariable Fractional Polynomial Method For Regression ModelDocument6 pagesMultivariable Fractional Polynomial Method For Regression ModelRicardo PosadasNo ratings yet
- Mathematics P2 2020Document32 pagesMathematics P2 2020uzilebanda30No ratings yet
- Chapter 13Document44 pagesChapter 13V.m. RajanNo ratings yet
- Basic Forms and NatureDocument278 pagesBasic Forms and NatureMaria100% (1)
- Extraction of Aleuritic Acid From Seedlac and Purification by Reactive Adsorption On Functionalized PolymersDocument7 pagesExtraction of Aleuritic Acid From Seedlac and Purification by Reactive Adsorption On Functionalized PolymersMd. Badrul IslamNo ratings yet
- Beee PPT - 5Document24 pagesBeee PPT - 5Girish Shankar MishraNo ratings yet
- 2 Po1 PDFDocument13 pages2 Po1 PDFakileshwardinaNo ratings yet
- Math exam questions on history of numeration systemsDocument4 pagesMath exam questions on history of numeration systemsTrebor SwissNo ratings yet
- Step 3 BDocument2 pagesStep 3 BSOMKOWNo ratings yet
- W. F. Chen, Plasticity For Structural Engineers, 1988-7 PDFDocument1 pageW. F. Chen, Plasticity For Structural Engineers, 1988-7 PDFahmed shakerNo ratings yet
- Wheel Balancing Machine Inner SystemsDocument11 pagesWheel Balancing Machine Inner SystemsArmghan NaeemNo ratings yet
- The Quantum Theory ofDocument121 pagesThe Quantum Theory ofBarata PrawiranegaraNo ratings yet
- UAE CST Framework PDFDocument280 pagesUAE CST Framework PDFChitra BharghavNo ratings yet
- MAK205 Chapter6 PDFDocument39 pagesMAK205 Chapter6 PDFMurojMaulanaCahyoNo ratings yet
- Chemistry LectureDocument47 pagesChemistry LectureDuchess DianalanNo ratings yet