You might also like
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Matlab - Object-Oriented Programming: Paul SchrimpfDocument15 pagesMatlab - Object-Oriented Programming: Paul SchrimpfDazhi JiangNo ratings yet
- BS Lab ManualsDocument49 pagesBS Lab ManualsThanigaivelu SubrmanianNo ratings yet
- Laboratory in Automatic Control: Lab 1 Matlab BasicsDocument23 pagesLaboratory in Automatic Control: Lab 1 Matlab BasicsnchubcclNo ratings yet
- Matlab Practical FileDocument19 pagesMatlab Practical FileAmit WaliaNo ratings yet
- Signals and Systems Lab (10!12!19) With AnswersDocument53 pagesSignals and Systems Lab (10!12!19) With AnswersKannan RNo ratings yet
- Curve Fitting With ScilabDocument8 pagesCurve Fitting With ScilabDiana NahielyNo ratings yet
- Laboratory Manual: SiddharthaDocument33 pagesLaboratory Manual: SiddharthaRupaVikramNo ratings yet
- Intro - Matlab - and - Numerical - Method Lab Full DocumentDocument75 pagesIntro - Matlab - and - Numerical - Method Lab Full DocumentEyu KalebNo ratings yet
- Matlab-Lecture 9 2018Document13 pagesMatlab-Lecture 9 2018berk1aslan2No ratings yet
- MATLAB IntegrationDocument7 pagesMATLAB IntegrationJay Srivastava100% (1)
- MATLAB and Simulink IntroductionDocument9 pagesMATLAB and Simulink IntroductionWasan ShakirNo ratings yet
- Exdbjava PDFDocument22 pagesExdbjava PDFelibunNo ratings yet
- Exercises Java Code Blocks Conditionals Loops PrecisionDocument22 pagesExercises Java Code Blocks Conditionals Loops PrecisionVũ HiềnNo ratings yet
- Matlab Intro For Asset PricingDocument5 pagesMatlab Intro For Asset PricingFabio BarbosaNo ratings yet
- Arrays: Vectors and Matrices: Course Notes Set 5a: COMP1200 Introduction To Computing For Engineers and ScientistsDocument28 pagesArrays: Vectors and Matrices: Course Notes Set 5a: COMP1200 Introduction To Computing For Engineers and Scientistsjwinters20No ratings yet
- 6 MatLab Tutorial ProblemsDocument27 pages6 MatLab Tutorial Problemsabhijeet834uNo ratings yet
- Matlab TutorialDocument18 pagesMatlab TutorialUmair ShahidNo ratings yet
- COMPARING NUMERICAL METHODSDocument8 pagesCOMPARING NUMERICAL METHODSSohaib Raja RajaNo ratings yet
- MATLAB Programs, For 7th Sem CSE Students - Tushar KantDocument4 pagesMATLAB Programs, For 7th Sem CSE Students - Tushar KantJámès KõstãNo ratings yet
- Record - Aarkum ManasilavillaDocument45 pagesRecord - Aarkum ManasilavillaAdarsh HNo ratings yet
- Che310handout2 PDFDocument72 pagesChe310handout2 PDFRidwan MahfuzNo ratings yet
- Ec 6511 Digital Signal Processing Lab ManualDocument88 pagesEc 6511 Digital Signal Processing Lab ManualSelva GanapathyNo ratings yet
- Yogendra Singh Rajpoot (1883930050) DSP FILEDocument42 pagesYogendra Singh Rajpoot (1883930050) DSP FILEYogendra Singh RajpootNo ratings yet
- Lab 4 ControlsDocument5 pagesLab 4 ControlsUmair AliNo ratings yet
- Linear Regression with Gradient DescentDocument43 pagesLinear Regression with Gradient DescentTev WallaceNo ratings yet
- DSP Matlab ProgramsDocument50 pagesDSP Matlab ProgramsDhiraj Thakur67% (3)
- Intro to SCILAB - Open Source Tool for Engineering ComputationsDocument30 pagesIntro to SCILAB - Open Source Tool for Engineering ComputationsBrian Mactavish MohammedNo ratings yet
- An Introduction To MATLAB For Loops and M-FilesDocument15 pagesAn Introduction To MATLAB For Loops and M-FilesJandry LuhukayNo ratings yet
- Python - Real-Time Plotting in While Loop With Matplotlib - Stack OverflowDocument3 pagesPython - Real-Time Plotting in While Loop With Matplotlib - Stack OverflowMatthew Vinodh RajNo ratings yet
- Tutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: CodeDocument13 pagesTutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: Codekiran preethiNo ratings yet
- Plotting Multiple FunctionsDocument18 pagesPlotting Multiple FunctionsSuman GhoshNo ratings yet
- Find A Real Root of The Equation F (X) X: ProblemDocument7 pagesFind A Real Root of The Equation F (X) X: ProblemMd. Faisal ChowdhuryNo ratings yet
- Matlab Programming For Engineers 5Th Edition Chapman Solutions Manual Full Chapter PDFDocument36 pagesMatlab Programming For Engineers 5Th Edition Chapman Solutions Manual Full Chapter PDFalberta.ruelas522100% (12)
- Fourier Spectral Methods in Matlab (And Python) : Program 5Document6 pagesFourier Spectral Methods in Matlab (And Python) : Program 5schalteggerNo ratings yet
- Matlab Tutorial2Document46 pagesMatlab Tutorial2Asterix83% (12)
- Program 1: Write A Program Using MATLAB To Plot Pole Zero Map While Transfer Function Is GivenDocument21 pagesProgram 1: Write A Program Using MATLAB To Plot Pole Zero Map While Transfer Function Is GivenShruti BhatnagarNo ratings yet
- CGPRDocument13 pagesCGPRanujamcanaacNo ratings yet
- (How To Plot 1-D, 2-D and 3-D in Matlab) : Department: Chemical EngineeringDocument18 pages(How To Plot 1-D, 2-D and 3-D in Matlab) : Department: Chemical EngineeringAram Nasih MuhammadNo ratings yet
- Control Systems MATLAB FileDocument25 pagesControl Systems MATLAB FileAgamNo ratings yet
- Lab 01Document8 pagesLab 01ALISHBA AZAMNo ratings yet
- Practical File: Digital Signal ProcessingDocument30 pagesPractical File: Digital Signal Processingmkumar3925No ratings yet
- CCP Lab Manual Vtu 1semDocument20 pagesCCP Lab Manual Vtu 1semChetan Hiremath0% (1)
- Communication System Lab Manual: Department of Telecom Engineering University of Engineering and Technology TaxilaDocument10 pagesCommunication System Lab Manual: Department of Telecom Engineering University of Engineering and Technology Taxilamehrbilal mashooqNo ratings yet
- Lab Report 1 Digital Image ProcessingDocument8 pagesLab Report 1 Digital Image ProcessingShan AnwerNo ratings yet
- Common & Uncommon in C'Document32 pagesCommon & Uncommon in C'bharats_28No ratings yet
- Tut 2 QNDocument7 pagesTut 2 QNReynard ArdianNo ratings yet
- (How To Plot 1-D, 2-D and 3-D in Matlab) : Department: Chemical EngineeringDocument18 pages(How To Plot 1-D, 2-D and 3-D in Matlab) : Department: Chemical EngineeringAram Nasih MuhammadNo ratings yet
- Numerical Methods For Engineers 7th Edition Chapra Solutions ManualDocument23 pagesNumerical Methods For Engineers 7th Edition Chapra Solutions Manualbenjaminhernandezfecmxjzrdt100% (12)
- Lab-2-Course Matlab Manual For LCSDocument12 pagesLab-2-Course Matlab Manual For LCSAshno KhanNo ratings yet
- Mat Lab ReviewDocument30 pagesMat Lab ReviewNarasimhan KumaraveluNo ratings yet
- Introduction to DSP simulations in MATLABDocument36 pagesIntroduction to DSP simulations in MATLABZARGHAM KHANNo ratings yet
- Am 4 PracDocument23 pagesAm 4 PracViraj MehtaNo ratings yet
- Python-Advances in Probabilistic Graphical ModelsDocument102 pagesPython-Advances in Probabilistic Graphical Modelsnaveen441No ratings yet
- Numerical Analysis and Statistical Techniques Lab: ETMA-252Document22 pagesNumerical Analysis and Statistical Techniques Lab: ETMA-252AnishSaxenaNo ratings yet
- Regularization: Updates To AssignmentDocument21 pagesRegularization: Updates To AssignmentYun SuNo ratings yet
- Lab IAT 02Document14 pagesLab IAT 02igorkapganglinkNo ratings yet
- Scott Carter - A Simple Model of The Surplus Approach To Value, Distribution, and GrowthDocument31 pagesScott Carter - A Simple Model of The Surplus Approach To Value, Distribution, and GrowthCesar Jeanpierre Castillo GarciaNo ratings yet
- Frank Fetter - Recent Discussion of The Capital ConceptDocument46 pagesFrank Fetter - Recent Discussion of The Capital ConceptCesar Jeanpierre Castillo GarciaNo ratings yet
- Frank Fetter - Price Economics Versus Welfare EconomicsDocument22 pagesFrank Fetter - Price Economics Versus Welfare EconomicsCesar Jeanpierre Castillo GarciaNo ratings yet
- A. V. Dicey - The New English War Cabinet As A Constitutional ExperimentDocument12 pagesA. V. Dicey - The New English War Cabinet As A Constitutional ExperimentCesar Jeanpierre Castillo GarciaNo ratings yet
- Scott Carter - C. E. Ferguson's Lost Reply To Joan Robinson On The Theory of CapitalDocument22 pagesScott Carter - C. E. Ferguson's Lost Reply To Joan Robinson On The Theory of CapitalCesar Jeanpierre Castillo GarciaNo ratings yet
- A. V. Dicey - Some Aspects of Democracy in EnglandDocument11 pagesA. V. Dicey - Some Aspects of Democracy in EnglandCesar Jeanpierre Castillo GarciaNo ratings yet
- A. V. Dicey - The Combination Laws As Illustrating The Relation Between Law and Opinion in England During The 19th CenturyDocument23 pagesA. V. Dicey - The Combination Laws As Illustrating The Relation Between Law and Opinion in England During The 19th CenturyCesar Jeanpierre Castillo GarciaNo ratings yet
- Warren S. Gramm - Chicago Economics. From Individualism True To Individualism FalseDocument24 pagesWarren S. Gramm - Chicago Economics. From Individualism True To Individualism FalseCesar Jeanpierre Castillo GarciaNo ratings yet
- Matthew McCaffrey - Pure Theory and Progressive Liberalism. Frank Fetter and The Austrian EconomistsDocument18 pagesMatthew McCaffrey - Pure Theory and Progressive Liberalism. Frank Fetter and The Austrian EconomistsCesar Jeanpierre Castillo GarciaNo ratings yet
- Matthew McCaffrey - Pure Theory and Progressive Liberalism. Frank Fetter and The Austrian EconomistsDocument18 pagesMatthew McCaffrey - Pure Theory and Progressive Liberalism. Frank Fetter and The Austrian EconomistsCesar Jeanpierre Castillo GarciaNo ratings yet
- Warren S. Gramm - Chicago Economics. From Individualism True To Individualism FalseDocument24 pagesWarren S. Gramm - Chicago Economics. From Individualism True To Individualism FalseCesar Jeanpierre Castillo GarciaNo ratings yet
- MD Interview - An Interview With Karl ShellDocument42 pagesMD Interview - An Interview With Karl ShellCesar Jeanpierre Castillo GarciaNo ratings yet
- Fabrice Bardet - From Statistics To 'Accountings'. How Desrosières' Perspective Suggests PDFDocument17 pagesFabrice Bardet - From Statistics To 'Accountings'. How Desrosières' Perspective Suggests PDFCesar Jeanpierre Castillo GarciaNo ratings yet
- Scott Carter - C. E. Ferguson and The Neoclassical Theory of Capital. A Matter of FaithDocument19 pagesScott Carter - C. E. Ferguson and The Neoclassical Theory of Capital. A Matter of FaithCesar Jeanpierre Castillo GarciaNo ratings yet
- Tiago Mata - Radical Economics As Journalism. The Origins of Dollars & SenseDocument15 pagesTiago Mata - Radical Economics As Journalism. The Origins of Dollars & SenseCesar Jeanpierre Castillo GarciaNo ratings yet
- Vincent Geloso - Douglass North, Shipping Productivity and InstitutionsDocument6 pagesVincent Geloso - Douglass North, Shipping Productivity and InstitutionsCesar Jeanpierre Castillo GarciaNo ratings yet
- Itzhak Gilboa, Andrew Postlewaite, Larry Samuelson y David Schmeidler - What Are Axiomatizations Good ForDocument33 pagesItzhak Gilboa, Andrew Postlewaite, Larry Samuelson y David Schmeidler - What Are Axiomatizations Good ForCesar Jeanpierre Castillo GarciaNo ratings yet
- MD Interview - An Interview With James HeckmanDocument38 pagesMD Interview - An Interview With James HeckmanCesar Jeanpierre Castillo GarciaNo ratings yet
- MD Interview - An Interview With Jean-Francois MertensDocument23 pagesMD Interview - An Interview With Jean-Francois MertensCesar Jeanpierre Castillo GarciaNo ratings yet
- Alfred Marshall's Appreciation of Economist Arnold ToynbeeDocument3 pagesAlfred Marshall's Appreciation of Economist Arnold ToynbeeCesar Jeanpierre Castillo GarciaNo ratings yet
- Michele Bee y Maria Pia Paganelli - Adam Smith, Anti-StoicDocument27 pagesMichele Bee y Maria Pia Paganelli - Adam Smith, Anti-StoicCesar Jeanpierre Castillo GarciaNo ratings yet
- StiglitzDocument50 pagesStiglitzsawyervalkNo ratings yet
- MD Dialogue - Rational Expectations. Retrospect and ProspectDocument25 pagesMD Dialogue - Rational Expectations. Retrospect and ProspectCesar Jeanpierre Castillo GarciaNo ratings yet
- The Research Excellence Framework 2014, Journal Ratings and The Marginalization of Heterodox EconomicsDocument37 pagesThe Research Excellence Framework 2014, Journal Ratings and The Marginalization of Heterodox EconomicsCesar Jeanpierre Castillo GarciaNo ratings yet
- Robert Heilbroner - Economics and Political Economy. Marx, Keynes, and SchumpeterDocument15 pagesRobert Heilbroner - Economics and Political Economy. Marx, Keynes, and SchumpeterCesar Jeanpierre Castillo GarciaNo ratings yet
- On The Origins of Piero Sraffa's Equations. New Evidence Following Pierangelo Garegnani's LeadDocument25 pagesOn The Origins of Piero Sraffa's Equations. New Evidence Following Pierangelo Garegnani's LeadGiannis TsilligirisNo ratings yet
- Ross Emmet - The Writing and Reception of Riks, Uncertainty and ProfitDocument26 pagesRoss Emmet - The Writing and Reception of Riks, Uncertainty and ProfitCesar Jeanpierre Castillo GarciaNo ratings yet
- Jim Thomas - A History of Economics at LSE Part Two - Post-RobbinsDocument4 pagesJim Thomas - A History of Economics at LSE Part Two - Post-RobbinsCesar Jeanpierre Castillo GarciaNo ratings yet
- Fidel Aroche y Óscar Ugarteche - The Death of Development Theory. From Friedrich Von Hayek To The Washington ConsensusDocument18 pagesFidel Aroche y Óscar Ugarteche - The Death of Development Theory. From Friedrich Von Hayek To The Washington ConsensusCesar Jeanpierre Castillo GarciaNo ratings yet
- Agnes Festré - Michael Polanyi's Vision of Economics. Spanning Hayek and KeynesDocument36 pagesAgnes Festré - Michael Polanyi's Vision of Economics. Spanning Hayek and KeynesCesar Jeanpierre Castillo GarciaNo ratings yet
- B.I Unit 1Document106 pagesB.I Unit 1kayNo ratings yet
- VT82C686B Delivers ValueDocument130 pagesVT82C686B Delivers Valueanacer55No ratings yet
- Evolution of Cellphones: From 1973 DynaTAC to SmartphonesDocument2 pagesEvolution of Cellphones: From 1973 DynaTAC to SmartphonesJorge MoreNo ratings yet
- P105WDocument7 pagesP105WJake DutkiewiczNo ratings yet
- Cyber CafeDocument1 pageCyber Cafeindia4gNo ratings yet
- 20336B ENU TrainerHandbook PDFDocument464 pages20336B ENU TrainerHandbook PDFgoredimaNo ratings yet
- Indonesia's Growing Mobile-First Internet and E-Commerce MarketDocument75 pagesIndonesia's Growing Mobile-First Internet and E-Commerce MarketwaladNo ratings yet
- Sparking InnovationDocument8 pagesSparking InnovationGouri GargateNo ratings yet
- The 3 Key Resources in Management Information System Challenge Are Informatio1Document9 pagesThe 3 Key Resources in Management Information System Challenge Are Informatio1masterkuala50% (2)
- Co PPT FinalDocument10 pagesCo PPT Final21-Nikita RanaNo ratings yet
- JS2 Computer Studies ExaminationDocument2 pagesJS2 Computer Studies ExaminationEjiro Ndifereke80% (5)
- Google Maps API 3 PolygonDocument3 pagesGoogle Maps API 3 PolygonRajendraNo ratings yet
- Useful Celerra CommandsDocument5 pagesUseful Celerra CommandsKumar PallavNo ratings yet
- Vertex S4HANA Integration Via SAP CPI Configuration GuideDocument14 pagesVertex S4HANA Integration Via SAP CPI Configuration GuidesiddharthadeepakNo ratings yet
- Customer Thank You - Flows - KlaviyoDocument1 pageCustomer Thank You - Flows - KlaviyoAdeps SmithsNo ratings yet
- Adobe CS6 Master CollectionDocument2 pagesAdobe CS6 Master CollectionjuuuuuangNo ratings yet
- Bhagwat Geeta 8Document18 pagesBhagwat Geeta 8khyamnarayanNo ratings yet
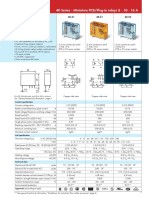
- Finder Relays Series 40 PDFDocument8 pagesFinder Relays Series 40 PDFCosmin ConstantinescuNo ratings yet
- Visa - ClassicDocument1 pageVisa - Classicestanislao Mba NdohoNo ratings yet
- OOP Project Ideas PDFDocument3 pagesOOP Project Ideas PDFsameed iqbalNo ratings yet
- Unix MCQDocument26 pagesUnix MCQKiran DatarNo ratings yet
- NSA Mind Control and PsyopsDocument3 pagesNSA Mind Control and PsyopsShahid KhanNo ratings yet
- All About Pak Affairs (DMG Officer) - Recommended - CSS ForumsDocument5 pagesAll About Pak Affairs (DMG Officer) - Recommended - CSS ForumsAzeem ChaudharyNo ratings yet
- Video Doorbell: Setup and Installation GuideDocument20 pagesVideo Doorbell: Setup and Installation GuideSajan JoseNo ratings yet
- Oracle Financials Cloud - Hands-ON (Account Payables - AP) On-Hands GuideDocument29 pagesOracle Financials Cloud - Hands-ON (Account Payables - AP) On-Hands GuideFernanda Gerevini PereiraNo ratings yet
- PRELIMENARIESDocument4 pagesPRELIMENARIESVilma Agua MondingNo ratings yet
- WCDMA RAN Protocols and ProceduresDocument38 pagesWCDMA RAN Protocols and ProceduresJihad DaoukNo ratings yet
- Deepak Raj BBA-4th Data BaseDocument48 pagesDeepak Raj BBA-4th Data Basegargnipun16No ratings yet
- Especificaciones Tecnicas S08-TURBO-G3Document3 pagesEspecificaciones Tecnicas S08-TURBO-G3Marco MartinezNo ratings yet