You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Merc Service Manual 11 Bravo Stern DrivesDocument596 pagesMerc Service Manual 11 Bravo Stern DrivesHayduke them92% (13)
- Deutz 2011 Workshop Manual PDFDocument380 pagesDeutz 2011 Workshop Manual PDFStefan Woest100% (4)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Apuntes de Filtrado y Modulacion RevDocument71 pagesApuntes de Filtrado y Modulacion RevRicardo Fuentes GómezNo ratings yet
- DEO Manual de Usuario-Español - TerminadoDocument56 pagesDEO Manual de Usuario-Español - TerminadoRicardo Fuentes Gómez100% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- T868 PDFDocument160 pagesT868 PDFRicardo Fuentes GómezNo ratings yet
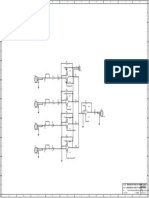
- Mezclador de Audio Con OpampDocument1 pageMezclador de Audio Con OpampRicardo Fuentes GómezNo ratings yet
- Transformada de LaplaceDocument16 pagesTransformada de LaplaceRicardo Fuentes Gómez100% (1)
- Extraordinario de Diseño LogicoDocument1 pageExtraordinario de Diseño LogicoRicardo Fuentes Gómez100% (1)
- Gramatica y AssemblerDocument8 pagesGramatica y AssemblerRicardo Fuentes GómezNo ratings yet
- Practica 1Document16 pagesPractica 1Ricardo Fuentes GómezNo ratings yet
- Komatsu SAA6D114E 3 Engine 114E 3 Series Shop Manual PDFDocument342 pagesKomatsu SAA6D114E 3 Engine 114E 3 Series Shop Manual PDFnajwa100% (5)
- V G930tog960 32c1002232 2009 04Document24 pagesV G930tog960 32c1002232 2009 04amin chaabenNo ratings yet
- Taller La Biela MotoresDocument2 pagesTaller La Biela MotoresMaria RíosNo ratings yet
- Diesel Loco Shed 02Document30 pagesDiesel Loco Shed 02Thevaillatha VelaiNo ratings yet
- WIRTGEN W150 - W150i - ES PDFDocument8 pagesWIRTGEN W150 - W150i - ES PDFEdwin Forero100% (1)
- Check List Rodillo TamborDocument1 pageCheck List Rodillo TamborMacarena Nuñez NuñezNo ratings yet
- Ueeneee104a - D.CDocument543 pagesUeeneee104a - D.CJohn ClementeNo ratings yet
- Air Bike NewDocument7 pagesAir Bike NewAnkit GargNo ratings yet
- 2011 Tracked PaverDocument24 pages2011 Tracked PaverAlexander LopezNo ratings yet
- Ficha Del Grupo Electrogeno (Doomsan-MD700) MODASADocument2 pagesFicha Del Grupo Electrogeno (Doomsan-MD700) MODASAKIKE SARAVIANo ratings yet
- Es gdp80 90vxDocument8 pagesEs gdp80 90vxsistemas msgruasNo ratings yet
- MR - HL1560 Data Sheet 2021Document1 pageMR - HL1560 Data Sheet 2021Mars ROCK DRILLNo ratings yet
- Lista de Precios Kama CHCDocument2 pagesLista de Precios Kama CHCcarlso gutierresNo ratings yet
- YezdiDocument7 pagesYezdikvsrathoreNo ratings yet
- Trailer-Mounted Batch Mixing Unit Trailer-Mounted Batch Mixing UnitDocument2 pagesTrailer-Mounted Batch Mixing Unit Trailer-Mounted Batch Mixing Unitmhidayat108No ratings yet
- FT Nueva Boxer Tolè - Septiembre 2014 PDFDocument4 pagesFT Nueva Boxer Tolè - Septiembre 2014 PDFMauricio Carvallo G.No ratings yet
- Montero V6 PDFDocument42 pagesMontero V6 PDFFernando OrtizNo ratings yet
- Specification: Model: Hyd. Crawler (JD - 1300E) CustomerDocument14 pagesSpecification: Model: Hyd. Crawler (JD - 1300E) CustomerAsad Aijaz100% (1)
- ENGINE (E5 - DOOSAN - SKKim - 180903)Document43 pagesENGINE (E5 - DOOSAN - SKKim - 180903)VladimirKolotNo ratings yet
- Manual Serviço 7700Document222 pagesManual Serviço 7700joaobargas100% (1)
- Manual de Reparaciones I-IIDocument460 pagesManual de Reparaciones I-IIAnonymous rvAn04wk1YNo ratings yet
- Aircraft Fuel System: Malaysian Institute of Aviation TechnologyDocument15 pagesAircraft Fuel System: Malaysian Institute of Aviation Technologyrihhh hhNo ratings yet
- Formulario de Solicitud de Trámites Del Registro Nacional Automotor 1 1Document6 pagesFormulario de Solicitud de Trámites Del Registro Nacional Automotor 1 1JAYDER ANDRES FORERO SANABRIA-EstudianteNo ratings yet
- Engine : General InformationDocument86 pagesEngine : General Informationahmed mNo ratings yet
- G. Plan de MantenimientoDocument7 pagesG. Plan de MantenimientoFaty MoralesNo ratings yet
- Manual ConducaoDocument35 pagesManual ConducaoAndre Filipe100% (1)
- XCMG 25Document7 pagesXCMG 25Islam AttiaNo ratings yet
- FW 2540130Document1 pageFW 2540130Luis Eduardo ChirivíNo ratings yet