You might also like
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- CPC Full Training MaterialDocument54 pagesCPC Full Training Materialsanthosh100% (1)
- Design of Earthing in Underground Substation Using ETAP With ConstraintsDocument6 pagesDesign of Earthing in Underground Substation Using ETAP With ConstraintsEditor IJTSRDNo ratings yet
- Op Amps: Design, Application, and TroubleshootingFrom EverandOp Amps: Design, Application, and TroubleshootingRating: 5 out of 5 stars5/5 (2)
- An Introduction To The Mysteries of Ground RadioDocument37 pagesAn Introduction To The Mysteries of Ground Radioiosua100% (1)
- DIY Wireless Remote Control Using RF ModulesDocument13 pagesDIY Wireless Remote Control Using RF ModulesdeepalpsNo ratings yet
- Manual - IR Intellisys System ControllerDocument42 pagesManual - IR Intellisys System ControllerTaleb100% (6)
- Manual - IR SG Control SystemDocument72 pagesManual - IR SG Control SystemTaleb80% (5)
- Earthing Resistance Calculations Is-3043Document14 pagesEarthing Resistance Calculations Is-3043lrpatra67% (3)
- Pelton Turbine Operation and DesignDocument22 pagesPelton Turbine Operation and DesignManuel CaipoNo ratings yet
- VHF/UHF Radio Family For Stationary and Ship Borne CommunicationsDocument22 pagesVHF/UHF Radio Family For Stationary and Ship Borne Communicationsdanto yuliardiNo ratings yet
- Intellisys SSR 10-450 (APDD 422C)Document107 pagesIntellisys SSR 10-450 (APDD 422C)Miguel NavarreteNo ratings yet
- Sensors MCQs UNIT 1 To 5 For StudentsDocument29 pagesSensors MCQs UNIT 1 To 5 For StudentsMohit Singh100% (1)
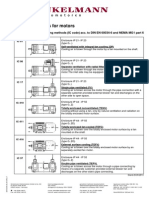
- Cooling Methods For Motors: Classification of The Cooling Methods (IC Code) Acc. To DIN EN 60034-6 and NEMA MG1 Part 6Document1 pageCooling Methods For Motors: Classification of The Cooling Methods (IC Code) Acc. To DIN EN 60034-6 and NEMA MG1 Part 6electworldNo ratings yet
- VSD Atv212hu22n4Document11 pagesVSD Atv212hu22n4rahmannafi kurniawanNo ratings yet
- ATV71HD18N4Z: Product Data SheetDocument13 pagesATV71HD18N4Z: Product Data SheetLuis ZavalaNo ratings yet
- ATV71HD18N4 Schneider ElectricDocument13 pagesATV71HD18N4 Schneider Electrichulso gurionNo ratings yet
- Data SheetDocument10 pagesData SheetMichael Puma ZeaNo ratings yet
- ATV71HD18N4Z: Product Data SheetDocument13 pagesATV71HD18N4Z: Product Data SheetSanchez HenriquezNo ratings yet
- Altivar 212 ATV212HD37N4Document11 pagesAltivar 212 ATV212HD37N4MECHANICAL FACILITY KNONo ratings yet
- ATV320U15N4C DocumentDocument7 pagesATV320U15N4C Documentrahmannafi kurniawanNo ratings yet
- ATV312HU55N4Document3 pagesATV312HU55N4BianNo ratings yet
- ATV71HD75N4: Product Data SheetDocument4 pagesATV71HD75N4: Product Data SheetBerkah Jaya PanelNo ratings yet
- HAVSO4T0015GDocument2 pagesHAVSO4T0015GNISHANNo ratings yet
- ATV71HD30N4: Product DatasheetDocument9 pagesATV71HD30N4: Product DatasheetGabriela Torres ReañoNo ratings yet
- HAVSO4T0022GDocument2 pagesHAVSO4T0022GNISHANNo ratings yet
- Catalogo Arrancador Suave PDFDocument2 pagesCatalogo Arrancador Suave PDFOscar J Llanos MNo ratings yet
- Altivar 71 Variable Frequency Drives VFD - ATV71HU75M3Document5 pagesAltivar 71 Variable Frequency Drives VFD - ATV71HU75M3Orlando AvendañoNo ratings yet
- Altivar Machine ATV320 ATV320U15N4C DocumentDocument11 pagesAltivar Machine ATV320 ATV320U15N4C DocumentPhaniNo ratings yet
- HAVSP4T1600PDocument2 pagesHAVSP4T1600PNISHANNo ratings yet
- HAVSO4T0007GDocument2 pagesHAVSO4T0007GNISHANNo ratings yet
- HAVSO4T0040GDocument2 pagesHAVSO4T0040GNISHANNo ratings yet
- Inv de Frenquecia Schneider PDFDocument3 pagesInv de Frenquecia Schneider PDFJulio GuelleriNo ratings yet
- Altivar Machine ATV320 ATV320U15N4C DocumentDocument10 pagesAltivar Machine ATV320 ATV320U15N4C DocumentEdwinCordovaPazNo ratings yet
- Altivar 320 Variable Frequency Drive VFD - ATV320U75M3CDocument11 pagesAltivar 320 Variable Frequency Drive VFD - ATV320U75M3CJonathan OsorioNo ratings yet
- HAVSO2S0022GDocument2 pagesHAVSO2S0022GNISHANNo ratings yet
- ATV310HU40N4E DocumentDocument6 pagesATV310HU40N4E DocumentrchaudharyrupandehiNo ratings yet
- HAVSO2S0015GDocument2 pagesHAVSO2S0015GNISHANNo ratings yet
- HAVSO2S0040GDocument2 pagesHAVSO2S0040GNISHANNo ratings yet
- HAVBA4T0022GDocument2 pagesHAVBA4T0022GzibrahimiNo ratings yet
- Altivar 320 Variable Frequency Drive VFD - ATV320D15N4BDocument11 pagesAltivar 320 Variable Frequency Drive VFD - ATV320D15N4BJader Alonso Acosta GuarinNo ratings yet
- ATV12HU15M3 Schneider ElectricDocument8 pagesATV12HU15M3 Schneider ElectricThe_RainmakerNo ratings yet
- Schneider Electric Altivar 61 Variable Frequency Drives VFD ATV61HD55N4ZDocument17 pagesSchneider Electric Altivar 61 Variable Frequency Drives VFD ATV61HD55N4Zkalaiselvan.kalaih4No ratings yet
- Schneider Electric Altivar 21 Variable Speed Drives Legacy Product ATV21WU40N4Document4 pagesSchneider Electric Altivar 21 Variable Speed Drives Legacy Product ATV21WU40N4jerome simionatoNo ratings yet
- HAVSO2S0007GDocument2 pagesHAVSO2S0007GNISHANNo ratings yet
- ATS01N209QN: Product DatasheetDocument5 pagesATS01N209QN: Product DatasheethajhdjNo ratings yet
- Product data sheet for variable speed drive ATV71 - 15kW-20HP - 480VDocument15 pagesProduct data sheet for variable speed drive ATV71 - 15kW-20HP - 480Vjorge eduardoNo ratings yet
- HAVSO2S0004GSMDocument2 pagesHAVSO2S0004GSMNISHANNo ratings yet
- HAVSO2S0007GSMDocument2 pagesHAVSO2S0007GSMNISHANNo ratings yet
- Schneider Electric_Altivar-61-Variable-Frequency-Drives-VFD_ATV61HC31N4Document18 pagesSchneider Electric_Altivar-61-Variable-Frequency-Drives-VFD_ATV61HC31N4sebastian.diazNo ratings yet
- ATV23Document3 pagesATV23Vinny RathNo ratings yet
- Variable speed drive datasheet for ATV650C20N4F 200kW driveDocument4 pagesVariable speed drive datasheet for ATV650C20N4F 200kW driveZarko MikicNo ratings yet
- Atv12hu15m2tq Datasheet WW En-GbDocument9 pagesAtv12hu15m2tq Datasheet WW En-GbBri CoolNo ratings yet
- ATV320U04N4B product data sheetDocument11 pagesATV320U04N4B product data sheetEDA INDIANo ratings yet
- ATS01N232QN: Product DatasheetDocument5 pagesATS01N232QN: Product Datasheetmelad yousefNo ratings yet
- Schneider Electric - Altivar-21-Variable-Speed-Drives-Legacy-Product - ATV21HD55N4Document4 pagesSchneider Electric - Altivar-21-Variable-Speed-Drives-Legacy-Product - ATV21HD55N4sofianigniteNo ratings yet
- Altistart 48 - ATS48D17QDocument5 pagesAltistart 48 - ATS48D17QHASTUNGKARA groupNo ratings yet
- Datasheet (2) KKKKKDocument6 pagesDatasheet (2) KKKKKrizki pNo ratings yet
- Atv310hu15n4e Datasheet Id In-IdDocument3 pagesAtv310hu15n4e Datasheet Id In-IdAhmed Khodja KarimNo ratings yet
- Schneider Electric - Altivar-Process-ATV600 - ATV6A0C63Q4Document4 pagesSchneider Electric - Altivar-Process-ATV600 - ATV6A0C63Q4deividasb2002No ratings yet
- Zelio Control RM17TU00Document6 pagesZelio Control RM17TU00Anas BasarahNo ratings yet
- Variable speed drive data sheet for 0.18 kW 1-phase ATV12H018M2Document2 pagesVariable speed drive data sheet for 0.18 kW 1-phase ATV12H018M2Shiv SardaNo ratings yet
- atv320u55n4cDocument11 pagesatv320u55n4cjohnroi5001No ratings yet
- Schneider Electric - Altivar-61 - ATV61HD45N4Document18 pagesSchneider Electric - Altivar-61 - ATV61HD45N4Mohamed Fahhad CoNo ratings yet
- Product data sheet ATV310HU75N4EDocument6 pagesProduct data sheet ATV310HU75N4Ekirtiraj gehlotNo ratings yet
- Schneider Electric - Altivar-312 - ATV312HU40N4Document5 pagesSchneider Electric - Altivar-312 - ATV312HU40N4Abdelrahman KamalNo ratings yet
- ATS01N244LY: Product Data SheetDocument2 pagesATS01N244LY: Product Data Sheetمحمد فاتحNo ratings yet
- Schneider Electric - Altivar-312-Variable-Frequency-Drives-VFD - ATV312HU22N4Document5 pagesSchneider Electric - Altivar-312-Variable-Frequency-Drives-VFD - ATV312HU22N4Ivan NikodijevicNo ratings yet
- Soft starter for asynchronous motors up to 11kWDocument6 pagesSoft starter for asynchronous motors up to 11kWnahuel883No ratings yet
- ATS22C59Q: Product Data SheetDocument10 pagesATS22C59Q: Product Data SheetAli ToamaNo ratings yet
- Schneider - Electric ATS22D32Q DatasheetDocument9 pagesSchneider - Electric ATS22D32Q DatasheetBehailu Mamo ZewdieNo ratings yet
- Altistart 22 ATS22D75Q PDFDocument2 pagesAltistart 22 ATS22D75Q PDFDaniel PedrosoNo ratings yet
- LG conglomerate spin-offs focused on electronics, energy and chemicalsDocument8 pagesLG conglomerate spin-offs focused on electronics, energy and chemicalsTalebNo ratings yet
- Telemecanique XCKMR54D1H29 Datasheet PDFDocument5 pagesTelemecanique XCKMR54D1H29 Datasheet PDFTalebNo ratings yet
- SEMIKRON DataSheet SKBH 28 07191050Document3 pagesSEMIKRON DataSheet SKBH 28 07191050TalebNo ratings yet
- Certificate of Compliance: Certificate Number Report Reference Issue DateDocument5 pagesCertificate of Compliance: Certificate Number Report Reference Issue DateTalebNo ratings yet
- GFT 87aDocument6 pagesGFT 87aRoni SocompiNo ratings yet
- Telemecanique XCKMR54D1H29 Datasheet PDFDocument5 pagesTelemecanique XCKMR54D1H29 Datasheet PDFTalebNo ratings yet
- Texas - Instruments LM2940CT 5.0 - NOPB DatasheetDocument20 pagesTexas - Instruments LM2940CT 5.0 - NOPB Datasheetcarlos duranNo ratings yet
- Compact & Powerful Inverter iG5ADocument44 pagesCompact & Powerful Inverter iG5AdanarcanaNo ratings yet
- ATV32HU55N4: Product Data SheetDocument11 pagesATV32HU55N4: Product Data SheetTalebNo ratings yet
- Telemecanique XCKMR54D1H29 Datasheet PDFDocument5 pagesTelemecanique XCKMR54D1H29 Datasheet PDFTalebNo ratings yet
- GDM2004D: Specifications of LCD ModuleDocument9 pagesGDM2004D: Specifications of LCD ModuleTalebNo ratings yet
- Altivar 12 - ATV12H037M2Document4 pagesAltivar 12 - ATV12H037M2TalebNo ratings yet
- Altivar 312 - ATV312HU30N4Document4 pagesAltivar 312 - ATV312HU30N4TalebNo ratings yet
- UPS IN6 10kVADocument2 pagesUPS IN6 10kVATalebNo ratings yet
- RM17TG20: Product Data SheetDocument5 pagesRM17TG20: Product Data SheetTalebNo ratings yet
- LS Inverter Series: Variable Frequency DriveDocument16 pagesLS Inverter Series: Variable Frequency DriveAlistair CiantarNo ratings yet
- Certificate of Compliance: Certificate Number Report Reference Issue DateDocument5 pagesCertificate of Compliance: Certificate Number Report Reference Issue DateTalebNo ratings yet
- Package Drawing: Rev. Date Alteration Designed Approved 01 Initial Release T. Gyetvai Zs. GyimóthyDocument1 pagePackage Drawing: Rev. Date Alteration Designed Approved 01 Initial Release T. Gyetvai Zs. GyimóthyTalebNo ratings yet
- Why Choose Us?: Lectronic Ervices Is Ireland's Leading Provider of MedicalDocument2 pagesWhy Choose Us?: Lectronic Ervices Is Ireland's Leading Provider of MedicalTalebNo ratings yet
- LS Inverter Series: Variable Frequency DriveDocument16 pagesLS Inverter Series: Variable Frequency DriveAlistair CiantarNo ratings yet
- Details PDF: Image Part Number Description Manufacturer QtyDocument1 pageDetails PDF: Image Part Number Description Manufacturer QtyTalebNo ratings yet
- RM17TG20: Product Data SheetDocument5 pagesRM17TG20: Product Data SheetTalebNo ratings yet
- Product Qualification at Vincotech: VJ Max VJ, Op Max TH FDocument3 pagesProduct Qualification at Vincotech: VJ Max VJ, Op Max TH FTalebNo ratings yet
- Certificate of Compliance: Certificate Number Report Reference Issue DateDocument5 pagesCertificate of Compliance: Certificate Number Report Reference Issue DateTalebNo ratings yet
- LS Inverter Series: Variable Frequency DriveDocument16 pagesLS Inverter Series: Variable Frequency DriveAlistair CiantarNo ratings yet
- How Do Ethernet Cables WorkDocument2 pagesHow Do Ethernet Cables Workfaruk BNo ratings yet
- 4.4 Revision Notes Electrical SafetyDocument13 pages4.4 Revision Notes Electrical Safetybipin jainNo ratings yet
- Pam 8320Document11 pagesPam 8320Darko GoracinskiNo ratings yet
- Malkhedi To Khurai Lopcsd KM 986Document1 pageMalkhedi To Khurai Lopcsd KM 986santosh iyerNo ratings yet
- MICROCONTROLLER-BASED CODE LOCKDocument3 pagesMICROCONTROLLER-BASED CODE LOCKKhushi Khanna67% (3)
- Lab Report 1 MergedDocument15 pagesLab Report 1 MergedNasir AliNo ratings yet
- MAN-WZA - N-EDocument44 pagesMAN-WZA - N-EMatias SapirNo ratings yet
- E&H Radar ManualDocument84 pagesE&H Radar ManualspeedstarNo ratings yet
- BTPS TRAINING PresentationDocument26 pagesBTPS TRAINING PresentationSantanu MukherjeeNo ratings yet
- Studies On The Non Contact AC Voltage Detector by Mohammad Julkar Nayeen 00919309002Document19 pagesStudies On The Non Contact AC Voltage Detector by Mohammad Julkar Nayeen 00919309002Sk Arman Sharier AnanNo ratings yet
- Group Delay As I Understand It by JOHN ORAMDocument2 pagesGroup Delay As I Understand It by JOHN ORAMDávid BaltaváriNo ratings yet
- Pesafr 2005 1611806 PDFDocument7 pagesPesafr 2005 1611806 PDFpedramNo ratings yet
- Difference Between Current Transformer (CT) and Potential Transformer (PT) - Electrical Interview Questions & AnswersDocument2 pagesDifference Between Current Transformer (CT) and Potential Transformer (PT) - Electrical Interview Questions & AnswersAlwyzz Happie RaamzzNo ratings yet
- Ignation System Interesting Topic and Some Interesting RepliesDocument12 pagesIgnation System Interesting Topic and Some Interesting RepliesHemant RasamNo ratings yet
- Multi Agent System Based Fault Location and Isolation in A Smart Microgrid SystemDocument4 pagesMulti Agent System Based Fault Location and Isolation in A Smart Microgrid SystemSaraMuzaffarNo ratings yet
- Tas 5706Document63 pagesTas 5706delianchenNo ratings yet
- Service Manual: RC-BM5Document38 pagesService Manual: RC-BM5Guillermo Antonio Jofre ReyesNo ratings yet
- FTDX1200 ManualDocument140 pagesFTDX1200 ManualtavitoroNo ratings yet
- VIVA QUESTIONS FOR PHYSICS PRACTICALS For Class 12 With Answers.Document8 pagesVIVA QUESTIONS FOR PHYSICS PRACTICALS For Class 12 With Answers.United KingdomNo ratings yet
- LM2576Document24 pagesLM2576Constantinescu OctavianNo ratings yet
- Charging & Discharging Capacitor CircuitDocument4 pagesCharging & Discharging Capacitor CircuitHemanth GedelaNo ratings yet
- Design and Development of Embedded Systems and IoT InternshipDocument13 pagesDesign and Development of Embedded Systems and IoT InternshipPrince PraveenNo ratings yet