You might also like
- AN-1165 Application Note: Op Amps For MEMS Microphone Preamp CircuitsDocument8 pagesAN-1165 Application Note: Op Amps For MEMS Microphone Preamp CircuitsJfgf.20087010No ratings yet
- Aries 675 Plus Aries Pro 675 PlusDocument2 pagesAries 675 Plus Aries Pro 675 PlusNovita WulandariNo ratings yet
- Mixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerDocument17 pagesMixed-Signal-Electronics: PD Dr.-Ing. Stephan HenzlerAhmed HamoudaNo ratings yet
- Harmonic Shift OscillatorlDocument10 pagesHarmonic Shift OscillatorlFrank FramNo ratings yet
- ALPHA I & II Equalized Preamplifier BCEPMLDocument6 pagesALPHA I & II Equalized Preamplifier BCEPMLTim CockramNo ratings yet
- DC Power Supply With Very Low Noise: Vaclav Papez, Stanislava PapezovaDocument6 pagesDC Power Supply With Very Low Noise: Vaclav Papez, Stanislava PapezovaM.Seddik DOUARNo ratings yet
- iSEMcon EMX Brochure75x212 - WebDocument24 pagesiSEMcon EMX Brochure75x212 - Webalecs serbNo ratings yet
- En - S8018II Spec SheetDocument3 pagesEn - S8018II Spec SheetAndrea PaoNo ratings yet
- WINSEM2018-19 - EEE2005 - ELA - TT515 - VL2018195001619 - Reference Material I - EEE2005 - L49+50 - DSP-Lab-Manual - Part-2 - PMLDocument9 pagesWINSEM2018-19 - EEE2005 - ELA - TT515 - VL2018195001619 - Reference Material I - EEE2005 - L49+50 - DSP-Lab-Manual - Part-2 - PMLKrishna SrivathsaNo ratings yet
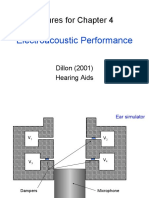
- Figures Chapter 4 Electroacoustic PerformanceDocument23 pagesFigures Chapter 4 Electroacoustic PerformanceTaegan YoungNo ratings yet
- Study On Shure SM57 and Neumann TLM102Document11 pagesStudy On Shure SM57 and Neumann TLM102leoNo ratings yet
- Signal Processing For The RotordynamicsDocument14 pagesSignal Processing For The Rotordynamicsejzuppelli8036No ratings yet
- Technical Presentation: Optical AmplifiersDocument10 pagesTechnical Presentation: Optical AmplifiersTapobrata MajumdarNo ratings yet
- Reflex Horn Speakers: TC-630/TC-630M TC-615/TC-615MDocument4 pagesReflex Horn Speakers: TC-630/TC-630M TC-615/TC-615MEdison MendozaNo ratings yet
- SYNAPSE Series Radio FM Transmitters-Low Power-Compact-Entry Level 30W, 50W1Document3 pagesSYNAPSE Series Radio FM Transmitters-Low Power-Compact-Entry Level 30W, 50W1Raul Angel Perez AbadNo ratings yet
- Klaxon Signals - Nexus 120 DC Sounder & Sounder - BeaconDocument7 pagesKlaxon Signals - Nexus 120 DC Sounder & Sounder - BeaconshbekhradNo ratings yet
- 8698Document4 pages8698Hrishikesh KakatyNo ratings yet
- Twin6 Be Product Sheet 1698Document2 pagesTwin6 Be Product Sheet 1698klepkojNo ratings yet
- Powerpak: Genelec 8030.lse Powerpak™ Multi-Channel Monitoring System Data SheetDocument2 pagesPowerpak: Genelec 8030.lse Powerpak™ Multi-Channel Monitoring System Data SheetSupuran RichardoNo ratings yet
- Compact 12 Inch Two-Way Speaker System: Key FeaturesDocument6 pagesCompact 12 Inch Two-Way Speaker System: Key FeaturesIvascu Stefan CiprianNo ratings yet
- Op Amps For MEMS Microphone Preamp CircuitsDocument9 pagesOp Amps For MEMS Microphone Preamp CircuitsalexNo ratings yet
- Brosur Audiometer - Sibelsound 400 AOM+Document3 pagesBrosur Audiometer - Sibelsound 400 AOM+mas agung chandraNo ratings yet
- 40 Brosur Audiometer - Sibelsound 400 AOM+ - 230515 - 151629Document4 pages40 Brosur Audiometer - Sibelsound 400 AOM+ - 230515 - 151629doc ferri apriadiNo ratings yet
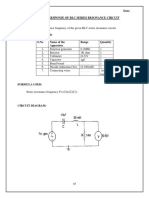
- 4-Frequency Response of RLC Series Resonance CircuitDocument3 pages4-Frequency Response of RLC Series Resonance CircuitUdayNo ratings yet
- Fire Alarm Siren BaseDocument5 pagesFire Alarm Siren BaseLado RostiashviliNo ratings yet
- Lecture 3 - Digital Audio Representation: Klara Nahrstedt Spring 2012Document34 pagesLecture 3 - Digital Audio Representation: Klara Nahrstedt Spring 2012Tech trixNo ratings yet
- Spectrum AnalyzerDocument2 pagesSpectrum AnalyzerMerlin Gilbert RajNo ratings yet
- Fluorescence Spectro FL 6500 Pulse and FL8500 SpecificationsDocument3 pagesFluorescence Spectro FL 6500 Pulse and FL8500 SpecificationsUswatul HasanahNo ratings yet
- Eatures: DSP 154H 15W Outdoor Waterproof Horn SpeakerDocument2 pagesEatures: DSP 154H 15W Outdoor Waterproof Horn SpeakerNatrajanNo ratings yet
- Digital Audio Representation: Klara Nahrstedt Spring 2012Document34 pagesDigital Audio Representation: Klara Nahrstedt Spring 2012Rana HafeezNo ratings yet
- SH 50 Spec Sheet11Document2 pagesSH 50 Spec Sheet11DIGIART Design Jogja - DigiSOUNDNo ratings yet
- Rad Calc Ver906-ODocument6 pagesRad Calc Ver906-OAndres Pipe CasallasNo ratings yet
- 100 Series EMC Probes: DescriptionDocument4 pages100 Series EMC Probes: DescriptionSumitta KonglaithongNo ratings yet
- Technics st-s1Document2 pagesTechnics st-s1bartzaNo ratings yet
- RT101 4 DecibelsDocument50 pagesRT101 4 DecibelszealxonlineNo ratings yet
- Microwaves101 - Spectrum AnalyzerDocument9 pagesMicrowaves101 - Spectrum AnalyzerThanhha NguyenNo ratings yet
- Convention Paper 5565: Audio Engineering SocietyDocument18 pagesConvention Paper 5565: Audio Engineering SocietycontatoNo ratings yet
- TSE X50 v2.0 ManualDocument13 pagesTSE X50 v2.0 ManualAlexander GutierrezNo ratings yet
- Ss495a PDFDocument5 pagesSs495a PDFDegayNo ratings yet
- Progress in Electromagnetics Research M, Vol. 28, 129-143, 2013Document15 pagesProgress in Electromagnetics Research M, Vol. 28, 129-143, 2013HaoTran1996No ratings yet
- RSL-3100 Xenon Light Source DatasheetDocument4 pagesRSL-3100 Xenon Light Source DatasheetIvanVolkovNo ratings yet
- Figures USC 3930 Pavitra Sub NanosecondDocument8 pagesFigures USC 3930 Pavitra Sub Nanosecondapi-3772340No ratings yet
- The Subjective and Objective Evaluation of Room Correction ProductsDocument30 pagesThe Subjective and Objective Evaluation of Room Correction ProductsМаксим НестеренкоNo ratings yet
- Understanding and Eliminating 1/f Noise: Robert KielyDocument4 pagesUnderstanding and Eliminating 1/f Noise: Robert KielyHafeez KtNo ratings yet
- β3 N12a Plastic Speaker English ManualDocument2 pagesβ3 N12a Plastic Speaker English Manualgerman daniel vasquez andradeNo ratings yet
- JBL_ASB6115-082016_11_25_2020Document2 pagesJBL_ASB6115-082016_11_25_2020mw6634988No ratings yet
- HTR 5000Document36 pagesHTR 5000mail4aphNo ratings yet
- Service Manual: SpecificationsDocument67 pagesService Manual: SpecificationsАлексейNo ratings yet
- Photoelectric Sensor: E3S-LSDocument8 pagesPhotoelectric Sensor: E3S-LSAnggi PrasetyoNo ratings yet
- Loudspeakers: (Updated 9/26/16)Document6 pagesLoudspeakers: (Updated 9/26/16)Alan RamirezNo ratings yet
- l3 - Part1 - Analog Front End Sampling - v22Document31 pagesl3 - Part1 - Analog Front End Sampling - v22Pham Xuan ThuyNo ratings yet
- Evpx BrochureDocument4 pagesEvpx Brochurelevaniko.levanikoNo ratings yet
- 4.4. Embroidered Textile Antennas Based On Hybrid Sewing Thread - PAVECDocument4 pages4.4. Embroidered Textile Antennas Based On Hybrid Sewing Thread - PAVECMirela CimpanuNo ratings yet
- DS.1.7735.021Document2 pagesDS.1.7735.021Naveen KumarNo ratings yet
- SpecSheet SilverNanowiresDocument10 pagesSpecSheet SilverNanowiresgultekinNo ratings yet
- ALS 1050 10 - ALS 1050 20 - Specs - 1803 1804Document2 pagesALS 1050 10 - ALS 1050 20 - Specs - 1803 1804Anonymous 60esBJZIjNo ratings yet
- Cermax Xenon Lamp Products CatalogDocument16 pagesCermax Xenon Lamp Products CatalogFernandoNo ratings yet
- Amateur Radio Electronics on Your MobileFrom EverandAmateur Radio Electronics on Your MobileRating: 5 out of 5 stars5/5 (1)
- Transfer FunctionsDocument4 pagesTransfer FunctionsAhmed HamoudaNo ratings yet
- Virtual Lab 7 - Martian RescueDocument4 pagesVirtual Lab 7 - Martian RescueAhmed HamoudaNo ratings yet
- Virtual Lab 4 - Handling and Displaying DataDocument3 pagesVirtual Lab 4 - Handling and Displaying DataAhmed HamoudaNo ratings yet
- An Eet Program S Innovative First Semester Course in Electricity ElectronicsDocument11 pagesAn Eet Program S Innovative First Semester Course in Electricity ElectronicsAhmed HamoudaNo ratings yet
- Virtual Lab 6 - Magnitudes, Phases Everywhere!Document5 pagesVirtual Lab 6 - Magnitudes, Phases Everywhere!Ahmed HamoudaNo ratings yet
- HCF Fie2002Document7 pagesHCF Fie2002Ahmed HamoudaNo ratings yet
- Lecture 8: Verilog Code: EE533: Network Processor Design and ProgrammingDocument28 pagesLecture 8: Verilog Code: EE533: Network Processor Design and ProgrammingAhmed HamoudaNo ratings yet
- Virtual Lab 8 - The Black BoxDocument4 pagesVirtual Lab 8 - The Black BoxAhmed HamoudaNo ratings yet
- A Network Project Course Based On Network ProcessoDocument5 pagesA Network Project Course Based On Network ProcessoAhmed HamoudaNo ratings yet
- Virtual Lab 3 - Direct IO CommunicationDocument6 pagesVirtual Lab 3 - Direct IO CommunicationAhmed HamoudaNo ratings yet
- Digital Oscilloscopes Powerful Tools For Eet LaboratoriesDocument12 pagesDigital Oscilloscopes Powerful Tools For Eet LaboratoriesAhmed HamoudaNo ratings yet
- Taming The All-Equipment Reliability TestDocument5 pagesTaming The All-Equipment Reliability TestAhmed HamoudaNo ratings yet
- Trade Register 2022 2022Document1 pageTrade Register 2022 2022Ahmed HamoudaNo ratings yet
- Introduction To Network ProcessorsDocument7 pagesIntroduction To Network ProcessorsAhmed HamoudaNo ratings yet
- Designing For Current Sharing in Power ArraysDocument4 pagesDesigning For Current Sharing in Power ArraysAhmed HamoudaNo ratings yet
- Design of Auxiliary Power Supply For Fault-Tolerant Operation of Solar Array RegulatorDocument2 pagesDesign of Auxiliary Power Supply For Fault-Tolerant Operation of Solar Array RegulatorAhmed HamoudaNo ratings yet
- Lect7 Current Sources p20Document1 pageLect7 Current Sources p20firpealNo ratings yet
- Long Term Aging of Electronics Systems & Maintainability Strategy For Critical ApplicationsDocument4 pagesLong Term Aging of Electronics Systems & Maintainability Strategy For Critical ApplicationsAhmed HamoudaNo ratings yet
- A "Beginner's Guide" To Fault Tolerant Power SuppliesDocument4 pagesA "Beginner's Guide" To Fault Tolerant Power SuppliesAhmed HamoudaNo ratings yet
- A FET Or-Ing Circuit For Fault-Tolerant Power SystemsDocument10 pagesA FET Or-Ing Circuit For Fault-Tolerant Power SystemsAhmed HamoudaNo ratings yet
- Sneak Analysis - Part 1 - Method and ProcedureDocument52 pagesSneak Analysis - Part 1 - Method and ProcedureAhmed HamoudaNo ratings yet
- Space Product Assurance: Sneak Analysis - Part 1: Principles and RequirementsDocument50 pagesSpace Product Assurance: Sneak Analysis - Part 1: Principles and Requirementsaemis2010No ratings yet
- 100A Redundant Isolation Module DatasheetDocument2 pages100A Redundant Isolation Module DatasheetAhmed HamoudaNo ratings yet
- Backplane Health Rests On Fault FindingDocument20 pagesBackplane Health Rests On Fault FindingAhmed HamoudaNo ratings yet
- Space Product Assurance: Sneak Analysis - Part 2: Clue ListDocument98 pagesSpace Product Assurance: Sneak Analysis - Part 2: Clue Listaemis2010No ratings yet
- Benchmark Standards For ASIC Technology EvaluationDocument5 pagesBenchmark Standards For ASIC Technology EvaluationAhmed HamoudaNo ratings yet
- Navmat P-9492Document18 pagesNavmat P-9492Jess OrtonNo ratings yet
- Achieving Reliability in Semiconductor Memory SystemsDocument1 pageAchieving Reliability in Semiconductor Memory SystemsAhmed HamoudaNo ratings yet
- Recipe For ReliabilityDocument4 pagesRecipe For ReliabilityAhmed HamoudaNo ratings yet
- RADC Initiatives in CAE For Reliability and MaintainabilityDocument3 pagesRADC Initiatives in CAE For Reliability and MaintainabilityAhmed HamoudaNo ratings yet
- Dell 2000FP LCD Monitor Engineering SpecificationDocument50 pagesDell 2000FP LCD Monitor Engineering SpecificationAndrew DclassifiedNo ratings yet
- The Apogee AD-8000 8-Channel, 24-Bit ConverterDocument6 pagesThe Apogee AD-8000 8-Channel, 24-Bit ConverternifnifnafnafNo ratings yet
- Experiment 10 - Lab ReportDocument11 pagesExperiment 10 - Lab ReportIntahsarNo ratings yet
- Fig. 1: Block Diagram Showing Architecture of AVR MicrocontrollerDocument30 pagesFig. 1: Block Diagram Showing Architecture of AVR MicrocontrollerPranav PrNo ratings yet
- Noise Optimization in Sensor Signal Conditioning Circuit Part IDocument37 pagesNoise Optimization in Sensor Signal Conditioning Circuit Part Iyzhao148No ratings yet
- CNC Machine Design Prototype Developed by Brazilian ResearchersDocument5 pagesCNC Machine Design Prototype Developed by Brazilian Researchershasan alsarrafNo ratings yet
- Product Specification Ingenia 1.5T OmegaDocument12 pagesProduct Specification Ingenia 1.5T OmegaBiomedical DepartmentNo ratings yet
- DS KA5x03xx-Series Fairchild Power SwitchDocument15 pagesDS KA5x03xx-Series Fairchild Power SwitchRubén Pérez ArmasNo ratings yet
- Adi PDFDocument6 pagesAdi PDFAndreas B KresnawanNo ratings yet
- Building Energy Management Systems The Basics Scanned PDFDocument56 pagesBuilding Energy Management Systems The Basics Scanned PDFsiva anandNo ratings yet
- PCF8591 1Document7 pagesPCF8591 1Ashesh PradhanNo ratings yet
- Impulse ResponseDocument8 pagesImpulse ResponseKumarJR86No ratings yet
- Sun Tracking System With Microcontroller 8051Document5 pagesSun Tracking System With Microcontroller 8051อธิราษฎร์ ดำดีNo ratings yet
- Radar Technology: ISBN 978-953-307-029-2Document434 pagesRadar Technology: ISBN 978-953-307-029-2RAUL EDUARDO GUTIERREZ COITIÑONo ratings yet
- Magnetic Bearing Technology ExplainedDocument19 pagesMagnetic Bearing Technology ExplainedMamesh MathankarNo ratings yet
- Low-Delay Digital PWM Controlled DC-DC Switching PowerDocument18 pagesLow-Delay Digital PWM Controlled DC-DC Switching Powerpvbabu79No ratings yet
- MDA-WinEMS51 Microprocessor TrainerDocument4 pagesMDA-WinEMS51 Microprocessor TrainerAhmed BisengarNo ratings yet
- Datasheet ECM 5085 Analog 4pgv1 A80901 PressDocument4 pagesDatasheet ECM 5085 Analog 4pgv1 A80901 Presslgreilly4No ratings yet
- Cypress Product Roadmap Public 001-89435 - 0LDocument255 pagesCypress Product Roadmap Public 001-89435 - 0LKumar BabuNo ratings yet
- 4x4 Keypad LCD InterfaceDocument9 pages4x4 Keypad LCD InterfaceSumeet SainiNo ratings yet
- ElektronikaDocument24 pagesElektronikaGunawan NababanNo ratings yet
- DSP2802x HeaderFiles Quickstart ReadmeDocument54 pagesDSP2802x HeaderFiles Quickstart ReadmeMirsad CosovicNo ratings yet
- AEG PS431. Engl PDFDocument88 pagesAEG PS431. Engl PDFÍcaro Viana67% (3)
- Fundamentals of Programming With DSK6713Document13 pagesFundamentals of Programming With DSK6713akhisar100% (1)
- Sensors 19 03364 PDFDocument31 pagesSensors 19 03364 PDFAnna StoynovaNo ratings yet
- MCP 1541Document18 pagesMCP 1541RodneyNo ratings yet
- Welding MachineDocument19 pagesWelding Machineashish sahaNo ratings yet
- A Fast Automatic Gain Control Scheme For 3GPP LTE TDD SystemDocument5 pagesA Fast Automatic Gain Control Scheme For 3GPP LTE TDD SystemnuslizNo ratings yet
- Combina Audio Sony-Pmc-D-305 - 305L PDFDocument74 pagesCombina Audio Sony-Pmc-D-305 - 305L PDFcosaceaionNo ratings yet
- 4472-2V-EP Operacion Ingles PDFDocument125 pages4472-2V-EP Operacion Ingles PDFLeonel Losada CardozoNo ratings yet