You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- OT Oss - Psilocybin Magic Mushroom Growers GuideDocument42 pagesOT Oss - Psilocybin Magic Mushroom Growers GuideTudor Apostol95% (22)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Physical Science DLP Q1W2Document7 pagesPhysical Science DLP Q1W2junar asentista50% (2)
- Basic Concepts of Applied Motor Learning and Performance: GROUP 2 - Presenter Name: CALICDAN, PIADocument44 pagesBasic Concepts of Applied Motor Learning and Performance: GROUP 2 - Presenter Name: CALICDAN, PIAPia Mae Zenith Calicdan100% (1)
- Cerebral Palsy Group General GuideDocument57 pagesCerebral Palsy Group General GuideIvana Titana Drive100% (2)
- Jarvis ProgrammingDocument7 pagesJarvis ProgrammingSunny TutejaNo ratings yet
- Ryan N.S. Topping Happiness and Wisdom Augustines Early Theology of EducationDocument265 pagesRyan N.S. Topping Happiness and Wisdom Augustines Early Theology of EducationenarkevicsNo ratings yet
- Interpretacion UFM - SOS Services CATDocument1 pageInterpretacion UFM - SOS Services CATcarlos trilloNo ratings yet
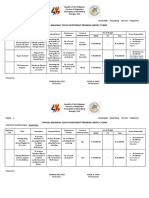
- Annual Barangay Youth Investment Program (Abyip) Cy 2020Document6 pagesAnnual Barangay Youth Investment Program (Abyip) Cy 2020Michael Louie Iglesias100% (3)
- International Tables For Crystallography A1Document735 pagesInternational Tables For Crystallography A1piyushsinha64817No ratings yet
- Electrokinetic Pixels With Biprimary Inks For Color Displays and Color Temperature Tunable Smart WindowsDocument7 pagesElectrokinetic Pixels With Biprimary Inks For Color Displays and Color Temperature Tunable Smart WindowsIvana Titana DriveNo ratings yet
- Finite Difference MethodDocument31 pagesFinite Difference MethodIvana Titana DriveNo ratings yet
- Electrokinetics and ElectrohydrodynamicsDocument33 pagesElectrokinetics and ElectrohydrodynamicsIvana Titana DriveNo ratings yet
- WRAP Rectenna Device From Theory Practice Gammon 2017Document36 pagesWRAP Rectenna Device From Theory Practice Gammon 2017Ivana Titana DriveNo ratings yet
- Icmepe Di GarboDocument7 pagesIcmepe Di GarboIvana Titana DriveNo ratings yet
- Selected Nanotechnologies For Renewable Energy Applications: Samuel S. Mao and Xiaobo ChenDocument18 pagesSelected Nanotechnologies For Renewable Energy Applications: Samuel S. Mao and Xiaobo ChenIvana Titana DriveNo ratings yet
- (Bonus Lesson) Virtual Executive Assistant With AngeliDocument44 pages(Bonus Lesson) Virtual Executive Assistant With Angeliyus rinaNo ratings yet
- Design, Analysis and Optimization of Six Cylinders Compressed Air Radial EngineDocument8 pagesDesign, Analysis and Optimization of Six Cylinders Compressed Air Radial EngineAbhishek MeNo ratings yet
- Statistics Lectures Slides, 2.4 Random VariablesDocument15 pagesStatistics Lectures Slides, 2.4 Random VariablesRamiz IqbalNo ratings yet
- C Programming SyllabusDocument3 pagesC Programming Syllabusabinayasundaramoorthi2000No ratings yet
- Affidavit of Loss PlateDocument2 pagesAffidavit of Loss PlateluckyNo ratings yet
- Special Instruction Heat ExchangerDocument26 pagesSpecial Instruction Heat ExchangerDhiyo MulyadiNo ratings yet
- Catia V5 Cheat Sheet: GeneralDocument1 pageCatia V5 Cheat Sheet: GeneralAS 15 SATHIYAMOORTHI MNo ratings yet
- SeminarDocument13 pagesSeminarJayesh ChaudhariNo ratings yet
- List of TextbooksDocument5 pagesList of TextbooksBisen VikasNo ratings yet
- Adsorption ChillerDocument19 pagesAdsorption Chilleragalvan1311No ratings yet
- Wake - Up - Bharat (Ebook by Siksharthakam)Document114 pagesWake - Up - Bharat (Ebook by Siksharthakam)fdfborNo ratings yet
- Elixir Chemistry Tuition Center, Ramnagar-3, Agartala, Tripura-799002, PH: 8794052358Document19 pagesElixir Chemistry Tuition Center, Ramnagar-3, Agartala, Tripura-799002, PH: 8794052358Elixir ChemistryNo ratings yet
- Final Hydrogen Fuel Cell VehicleDocument8 pagesFinal Hydrogen Fuel Cell VehiclePrashon GNo ratings yet
- Eng ReviewerDocument2 pagesEng ReviewerFroy Joe Laroga Barrera IINo ratings yet
- Eng Moti 0Document2 pagesEng Moti 0Barış ErçeNo ratings yet
- Erythrocytosis PolycythemiaDocument2 pagesErythrocytosis PolycythemiaNeoMedica100% (2)
- 9th Physics Battle of Brains 2020Document16 pages9th Physics Battle of Brains 2020Rana WaqasNo ratings yet
- Tally WorkshopDocument16 pagesTally WorkshopSourashtra tally academyNo ratings yet
- Elective Surgeries and Procedures: COVID-19Document3 pagesElective Surgeries and Procedures: COVID-19Victor JimenezNo ratings yet
- Corporate Finance Asia Pacific Edition John Graham Full ChapterDocument53 pagesCorporate Finance Asia Pacific Edition John Graham Full Chapterrobert.coleman246100% (7)
- GaussDocument5 pagesGaussJohn Wanyoike MakauNo ratings yet
- MIT18 S096F13 Lecnote14Document34 pagesMIT18 S096F13 Lecnote14eni100% (1)