You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Interturn Short-Circuit Detector For Turbine-Generator Rotor WindingsDocument6 pagesInterturn Short-Circuit Detector For Turbine-Generator Rotor WindingsEng Bagaragaza Romuald100% (1)
- Exam Legal FormsDocument2 pagesExam Legal FormsAljunBaetiongDiazNo ratings yet
- Writing Skills - Communication Skills Training From MindToolsDocument4 pagesWriting Skills - Communication Skills Training From MindToolsMazher JavaidNo ratings yet
- 1 s2.0 S1877705816001922 MainDocument7 pages1 s2.0 S1877705816001922 MaindebanshushekharNo ratings yet
- Detection of Unbalance in Rotating Machines Using Shaft Deflection Measurement During Its OperationDocument13 pagesDetection of Unbalance in Rotating Machines Using Shaft Deflection Measurement During Its OperationMuhammad Fadel1447798No ratings yet
- Detection of Unbalance in Rotating Machines Using PDFDocument14 pagesDetection of Unbalance in Rotating Machines Using PDFKonstantinos KamarasNo ratings yet
- 462 Firstpage 1954081285689041Document1 page462 Firstpage 1954081285689041Akindolu DadaNo ratings yet
- Estimating Rotor Unbalance From A Single Run-Up and Using Reduced SensorsDocument14 pagesEstimating Rotor Unbalance From A Single Run-Up and Using Reduced SensorsAgustín Erasmo Juárez MartínezNo ratings yet
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocument14 pagesVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNo ratings yet
- Detection of Combined Gear-Bearing Fault in Single Stage Spur Gear Box Using Artificial Neural NetworkDocument8 pagesDetection of Combined Gear-Bearing Fault in Single Stage Spur Gear Box Using Artificial Neural NetworkanandagholapNo ratings yet
- Vibration Analysis Using Wavelet Transform and Fuzzy Logic For Shaft MisalignmentDocument11 pagesVibration Analysis Using Wavelet Transform and Fuzzy Logic For Shaft Misalignmentshubham patilNo ratings yet
- Effect of Parallel Misalignment in Rotating MachineryDocument3 pagesEffect of Parallel Misalignment in Rotating MachineryresearchparksNo ratings yet
- Modal and Harmonic Analysis of Turbocharger Turbine Using Finite Element MethodDocument4 pagesModal and Harmonic Analysis of Turbocharger Turbine Using Finite Element MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Pedotti2016 PDFDocument6 pagesPedotti2016 PDFbekhouche nasreddineNo ratings yet
- Case Studies in Mechanical Systems and Signal ProcessingDocument14 pagesCase Studies in Mechanical Systems and Signal ProcessingHarshavardhan B SNo ratings yet
- Winding Distribution Effects On Inductio PDFDocument9 pagesWinding Distribution Effects On Inductio PDFfares noureddineNo ratings yet
- Vibration of Overhung RotorsDocument11 pagesVibration of Overhung RotorsAri HaranNo ratings yet
- 2018 - Devarabhotla Sai ChandraDocument9 pages2018 - Devarabhotla Sai ChandraEri SukocoNo ratings yet
- Bearing Fault Monitoring Using CWT Based VibrationDocument8 pagesBearing Fault Monitoring Using CWT Based Vibrationradhimaladzi69No ratings yet
- Investigation On Modal Transient Response Analysis of Engine Crankshaft StructureDocument10 pagesInvestigation On Modal Transient Response Analysis of Engine Crankshaft StructureDiego LliviNo ratings yet
- ISA Transactions: Research ArticleDocument12 pagesISA Transactions: Research Articlemarut1999No ratings yet
- Cyclostationarity Approach For Monitoring Chatter and ToolDocument23 pagesCyclostationarity Approach For Monitoring Chatter and ToolAbdelkader RabahNo ratings yet
- Theoretical and Experimental Study of Rotor Bearing SystemsDocument9 pagesTheoretical and Experimental Study of Rotor Bearing SystemsIAEME PublicationNo ratings yet
- Vibrational Analysis of Flexible Coupling by Considering UnbalanceDocument11 pagesVibrational Analysis of Flexible Coupling by Considering UnbalanceMuhammad TabishNo ratings yet
- Ball Bearing Enveloppe19745Document13 pagesBall Bearing Enveloppe19745Eric21No ratings yet
- Frequencydomainaveragingbasedexperimentalevaluationof Gear Fault Without Tachometer For Fluctuating Speed ConditionsDocument18 pagesFrequencydomainaveragingbasedexperimentalevaluationof Gear Fault Without Tachometer For Fluctuating Speed ConditionsPradeep KunduNo ratings yet
- Model Based Fault Identi Cation of UnbalanceDocument10 pagesModel Based Fault Identi Cation of UnbalanceJulio CesarNo ratings yet
- Detection of Unbalance in Rotating Machines UsingDocument14 pagesDetection of Unbalance in Rotating Machines UsingShashi Bhushan KumarNo ratings yet
- Final Veto Mac PaperDocument16 pagesFinal Veto Mac Papermartinsb76No ratings yet
- Wear and Multiple Fault Diagnosis On Rolling Bearings Using Vibration Signal AnalysisDocument9 pagesWear and Multiple Fault Diagnosis On Rolling Bearings Using Vibration Signal AnalysisinventionjournalsNo ratings yet
- Entropy: High-Speed Spindle Fault Diagnosis With The Empirical Mode Decomposition and Multiscale Entropy MethodDocument14 pagesEntropy: High-Speed Spindle Fault Diagnosis With The Empirical Mode Decomposition and Multiscale Entropy MethodEstebanRiveraNo ratings yet
- A Review of Gear Fault Diagnosis Using Various Condition IndicatorsDocument11 pagesA Review of Gear Fault Diagnosis Using Various Condition IndicatorsPradeep KunduNo ratings yet
- Turbo Machinery Operation and MaintenanceDocument2 pagesTurbo Machinery Operation and MaintenanceNirmal SubudhiNo ratings yet
- Wavelet Fault Diagnosis of Induction MotorDocument26 pagesWavelet Fault Diagnosis of Induction MotorkanuvietNo ratings yet
- Identification of Torsional Vibration Features in Electrical Powered Rotating EquipmentDocument9 pagesIdentification of Torsional Vibration Features in Electrical Powered Rotating EquipmentHasan PashaNo ratings yet
- Decomposition of Gear Motion Signals and Its Application ToDocument7 pagesDecomposition of Gear Motion Signals and Its Application ToLucas Caldas RebouçasNo ratings yet
- 2019 Identification of Unbalance in A Rotor System Using A JointDocument14 pages2019 Identification of Unbalance in A Rotor System Using A JointakashNo ratings yet
- Bend Shaft Vibration SpectrumDocument6 pagesBend Shaft Vibration SpectrumAvnish DubeyNo ratings yet
- HTTPWWW BG Utp Edu Plartdiagnostyka2010galarDocument7 pagesHTTPWWW BG Utp Edu Plartdiagnostyka2010galardfountoukidisNo ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Fault Diagnosis of Helical Gear Through Various Vibration Techniques in Automotive GearboxDocument6 pagesFault Diagnosis of Helical Gear Through Various Vibration Techniques in Automotive GearboxJOSE DIVAL PASTOR RAMOSNo ratings yet
- Final Paper IJLTETDocument7 pagesFinal Paper IJLTETaditendra1No ratings yet
- Various Types of Faults and Their Detect PDFDocument10 pagesVarious Types of Faults and Their Detect PDFfares noureddineNo ratings yet
- Why Phase Information Is Important For Diagnosing Machinery ProblemsDocument3 pagesWhy Phase Information Is Important For Diagnosing Machinery ProblemsdinhdtNo ratings yet
- Cost Effective SystemDocument6 pagesCost Effective SystemrajeshmholmukheNo ratings yet
- 10 30931-Jetas 853107-1486475Document13 pages10 30931-Jetas 853107-1486475Haf26No ratings yet
- Online Cage Rotor Fault DetectionDocument6 pagesOnline Cage Rotor Fault DetectionPedro OdorizziNo ratings yet
- Bearing Vibration Analysis On Steam Turbine: Risal Abu, AfdalDocument7 pagesBearing Vibration Analysis On Steam Turbine: Risal Abu, AfdalSatish SinghNo ratings yet
- Vibration-Based Condition Monitoring of Rotating Machines Using A Machine Composite SpectrumDocument15 pagesVibration-Based Condition Monitoring of Rotating Machines Using A Machine Composite Spectrumpeter.phamNo ratings yet
- Condition Monitoring of Ball Bearings Using Statistical AnalysisDocument7 pagesCondition Monitoring of Ball Bearings Using Statistical AnalysisInnovative Research PublicationsNo ratings yet
- Vibrations Case StudiesDocument3 pagesVibrations Case StudiesSajjad AbidNo ratings yet
- Variable Structure Methods in Hydraulic Servo Systems ControlDocument7 pagesVariable Structure Methods in Hydraulic Servo Systems ControlPierre TrillosNo ratings yet
- 263 PucheDocument5 pages263 Puchesaudaltaf5201No ratings yet
- MV 1 Lab ReportDocument9 pagesMV 1 Lab ReportGoh Leng TeckNo ratings yet
- Research ArticleDocument19 pagesResearch ArticlekimikononNo ratings yet
- Vibration Monitoring and AnalysisDocument8 pagesVibration Monitoring and AnalysishashimtkmceNo ratings yet
- Fault Size Estimation Using Vibration Signatures in A Wi 2016 Procedia EnginDocument7 pagesFault Size Estimation Using Vibration Signatures in A Wi 2016 Procedia EnginAhmed El-ShafeiNo ratings yet
- Failure Evaluation of Ball Bearing For Prognostics: SciencedirectDocument8 pagesFailure Evaluation of Ball Bearing For Prognostics: SciencedirectsebastianNo ratings yet
- 18 Syed Kamruddin Ahamed Final PaperDocument16 pages18 Syed Kamruddin Ahamed Final PaperiisteNo ratings yet
- Hysteresis MotorDocument27 pagesHysteresis MotorSubham GhoshNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Fatigue Life Study of Francis Pump Under Reverse GDocument15 pagesFatigue Life Study of Francis Pump Under Reverse GEng Bagaragaza RomualdNo ratings yet
- Condition Monitoring System For Hydro TurbinesDocument4 pagesCondition Monitoring System For Hydro TurbinesEng Bagaragaza RomualdNo ratings yet
- Water Hammer Analysis of A Run-of-River Hydroelectric Power Plant in Lower Himalaya: A Case StudyDocument9 pagesWater Hammer Analysis of A Run-of-River Hydroelectric Power Plant in Lower Himalaya: A Case StudyEng Bagaragaza RomualdNo ratings yet
- A I RS: David G. Dorrell, William ThomsonDocument11 pagesA I RS: David G. Dorrell, William ThomsonEng Bagaragaza RomualdNo ratings yet
- Identification of Principal Factors Causing UnbalancedDocument6 pagesIdentification of Principal Factors Causing UnbalancedEng Bagaragaza RomualdNo ratings yet
- Nr. Crt. Frequency Possible Cause Vibration Amplitude Direction ObservationsDocument3 pagesNr. Crt. Frequency Possible Cause Vibration Amplitude Direction ObservationsEng Bagaragaza RomualdNo ratings yet
- Preventing Destructive Effects of Water Hammer in Hydropower Plant PenstocksDocument25 pagesPreventing Destructive Effects of Water Hammer in Hydropower Plant PenstocksEng Bagaragaza RomualdNo ratings yet
- Kapl Turb Inc93 PDFDocument16 pagesKapl Turb Inc93 PDFEng Bagaragaza RomualdNo ratings yet
- Study On Wave Calculation of An Air CushionDocument27 pagesStudy On Wave Calculation of An Air CushionEng Bagaragaza RomualdNo ratings yet
- Preventing DestructiveDocument25 pagesPreventing DestructiveEng Bagaragaza RomualdNo ratings yet
- Critical Analysis of Vibration Sources of Hydro Aggregates in Operating RegimeDocument8 pagesCritical Analysis of Vibration Sources of Hydro Aggregates in Operating RegimeEng Bagaragaza RomualdNo ratings yet
- Selection of Guide Vane Pro Le For Erosion Handling in Francis TurbinesDocument9 pagesSelection of Guide Vane Pro Le For Erosion Handling in Francis TurbinesEng Bagaragaza RomualdNo ratings yet
- Modelling and Transient Simulation of Water Flow in Pipelines Using Wanda Transient SoftwareDocument10 pagesModelling and Transient Simulation of Water Flow in Pipelines Using Wanda Transient SoftwareEng Bagaragaza RomualdNo ratings yet
- Erosion Wear On Francis Turbine Components DueDocument26 pagesErosion Wear On Francis Turbine Components DueEng Bagaragaza RomualdNo ratings yet
- Sediment Erosion in Hydro Turbines 1Document414 pagesSediment Erosion in Hydro Turbines 1Eng Bagaragaza RomualdNo ratings yet
- RPHC4 - District Profile-Gasabo - 0Document149 pagesRPHC4 - District Profile-Gasabo - 0Eng Bagaragaza RomualdNo ratings yet
- Bur EralDocument108 pagesBur EralEng Bagaragaza RomualdNo ratings yet
- DL Timetable 2018Document10 pagesDL Timetable 2018Eng Bagaragaza RomualdNo ratings yet
- Lecture7 Open ChannelDocument26 pagesLecture7 Open ChannelEng Bagaragaza RomualdNo ratings yet
- Microsoft PowerPoint - Open-Channel 1Document63 pagesMicrosoft PowerPoint - Open-Channel 1Eng Bagaragaza RomualdNo ratings yet
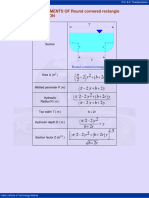
- GEOMETRIC ELEMENTS OF Round Cornered Rectangle Channel SectionDocument1 pageGEOMETRIC ELEMENTS OF Round Cornered Rectangle Channel SectionEng Bagaragaza RomualdNo ratings yet
- WS - Chap 1& 2&3Document28 pagesWS - Chap 1& 2&3Eng Bagaragaza RomualdNo ratings yet
- Module1: Open Channel FlowDocument7 pagesModule1: Open Channel FlowEng Bagaragaza RomualdNo ratings yet
- Mathematics 10 - Fourth Quarter Summative Test 2Document2 pagesMathematics 10 - Fourth Quarter Summative Test 2Arabella100% (1)
- Cardiac Surgeries PPT FinalDocument55 pagesCardiac Surgeries PPT FinalDumora FatmaNo ratings yet
- GA3-240202501-AA2. Presentar Funciones de Su OcupaciónDocument2 pagesGA3-240202501-AA2. Presentar Funciones de Su OcupaciónDidier Andres Núñez OrdóñezNo ratings yet
- 2023-01-19 Center For Biological Diversity Sea Otter Reintroduction PetitionDocument50 pages2023-01-19 Center For Biological Diversity Sea Otter Reintroduction PetitionKaitlin AthertonNo ratings yet
- A Detailed Lesson Plan in ScienceDocument5 pagesA Detailed Lesson Plan in ScienceMapandi Tee Em100% (1)
- Quarter 4 MAPEH 3 DLL WEEK 1Document6 pagesQuarter 4 MAPEH 3 DLL WEEK 1Mary Rose P. RiveraNo ratings yet
- Lecture 3Document20 pagesLecture 3Biotechnology IIUM Kuantan100% (5)
- LC DiscountingDocument2 pagesLC Discountingfarm economyNo ratings yet
- Seminar Report On Intrusion ToleranceDocument15 pagesSeminar Report On Intrusion ToleranceVyshak Yz100% (5)
- Solution Far510 - Jun 2015Document8 pagesSolution Far510 - Jun 2015azila aliasNo ratings yet
- Arabic LasmaDocument81 pagesArabic LasmaNusrath FatimaNo ratings yet
- Odwin Gonzalez Pacheco - ATTWN Anticipation Guide Response Doc - 7013996 PDFDocument3 pagesOdwin Gonzalez Pacheco - ATTWN Anticipation Guide Response Doc - 7013996 PDFOdwin Gonzalez PachecoNo ratings yet
- Morikawa 2021Document3 pagesMorikawa 2021Muhammad BilalNo ratings yet
- Quick Match Slow Match: Old FableDocument3 pagesQuick Match Slow Match: Old FableSiddharth ShrivastavaNo ratings yet
- In The Supreme Court of Pakistan: PresentDocument6 pagesIn The Supreme Court of Pakistan: PresentDanish AnsariNo ratings yet
- multimedia Designer/Visual Development Artist: //resumeDocument2 pagesmultimedia Designer/Visual Development Artist: //resumedeepika singhNo ratings yet
- Sepharial - The Forecast 7 (28p)Document28 pagesSepharial - The Forecast 7 (28p)roy100% (2)
- Progress Report: Design Considerations of Go KartDocument6 pagesProgress Report: Design Considerations of Go KartINNOVIZ 19No ratings yet
- 定稿Iqomah Richtig-2020-9-15 (1) revised by JoshuaDocument23 pages定稿Iqomah Richtig-2020-9-15 (1) revised by Joshua7-11 Bunch0% (1)
- Internship - Daily Time Record (DTR) : Date Morning Afternoon Actual Hours Worked in Out in OutDocument2 pagesInternship - Daily Time Record (DTR) : Date Morning Afternoon Actual Hours Worked in Out in Outkim suarezNo ratings yet
- Yatra Registration Letter - UTDB (MSD)Document2 pagesYatra Registration Letter - UTDB (MSD)PraphullKishoreNo ratings yet
- Dustfix: Conditioners For Industrial DustsDocument4 pagesDustfix: Conditioners For Industrial DustsabcNo ratings yet
- CVSA18-M07-Cloud Architecture & DesignDocument49 pagesCVSA18-M07-Cloud Architecture & DesignMuneeza HashmiNo ratings yet
- EnthalpyDocument8 pagesEnthalpymelissaNo ratings yet
- Practice Module 4Document61 pagesPractice Module 4jarrettlimzwNo ratings yet
- ASHRAE Vision 2020: Producing Net Zero Energy BuildingsDocument28 pagesASHRAE Vision 2020: Producing Net Zero Energy Buildingscloud827No ratings yet
- Voting PatternsDocument31 pagesVoting Patternsstefania0912No ratings yet
- Principles of ManagementDocument11 pagesPrinciples of ManagementshubhNo ratings yet