You might also like
- Medi Sinewave UpsDocument20 pagesMedi Sinewave UpsBabuPD67% (6)
- Automatyczna Ładowarka Akumulatorów Ołowiowych: Kity AVTDocument8 pagesAutomatyczna Ładowarka Akumulatorów Ołowiowych: Kity AVTadyhansoloNo ratings yet
- O & M of Sub StationDocument94 pagesO & M of Sub StationAlbert Sekar100% (2)
- ETAP Relay CoordinationDocument6 pagesETAP Relay CoordinationJ Bagien100% (2)
- Substation Training ModuleDocument94 pagesSubstation Training ModuleKarthick Rathinasamy100% (8)
- Theory GraphDocument23 pagesTheory GraphArthur CarabioNo ratings yet
- Unit 7: Anthropology: Q2e Listening & Speaking 4: Audio ScriptDocument6 pagesUnit 7: Anthropology: Q2e Listening & Speaking 4: Audio ScriptĐại học Bạc Liêu Truyền thông100% (1)
- GT-N7100-Full Schematic PDFDocument67 pagesGT-N7100-Full Schematic PDFprncha86% (7)
- 05 x05 Standard Costing & Variance AnalysisDocument27 pages05 x05 Standard Costing & Variance AnalysisMary April MasbangNo ratings yet
- Working With Difficult People Online WorksheetDocument4 pagesWorking With Difficult People Online WorksheetHugh Fox IIINo ratings yet
- 25781-Designing Battery Management Systems PDFDocument5 pages25781-Designing Battery Management Systems PDFAnonymous ZRyj23t36b100% (2)
- STR2A100 Series Application Note (Rev.0.3) : Sanken Electric Co., LTDDocument18 pagesSTR2A100 Series Application Note (Rev.0.3) : Sanken Electric Co., LTDBertrand Soppo YokiNo ratings yet
- Power Management - Battery Charger With Cell-Balancing and Fuel Gauge Function SupportDocument13 pagesPower Management - Battery Charger With Cell-Balancing and Fuel Gauge Function SupportToni BioscaNo ratings yet
- Assignment - ENT777 - 2022Document5 pagesAssignment - ENT777 - 2022teektak1No ratings yet
- OriginatestDocument7 pagesOriginatestBernd WildnerNo ratings yet
- Pci Lab ManualDocument32 pagesPci Lab ManualrkshpatnaikNo ratings yet
- A Boost-Topology Battery Charger Powered From A Solar Panel: by Jeff Falin, and Wang LiDocument6 pagesA Boost-Topology Battery Charger Powered From A Solar Panel: by Jeff Falin, and Wang LisowmiyaveeranNo ratings yet
- Cargador Solar Ficha TecnicaDocument38 pagesCargador Solar Ficha TecnicaDEIMER RODRIGUEZ BALLESTANo ratings yet
- How To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - A High Power On-Board Charger DesignDocument5 pagesHow To Design Multi-Kw DC - DC Converters For Electric Vehicles (EVs) - A High Power On-Board Charger DesignThien DinhNo ratings yet
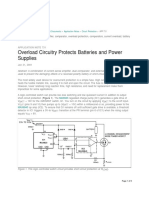
- Overload Circuitry Protects Batteries and Power SuppliesDocument3 pagesOverload Circuitry Protects Batteries and Power SuppliesRafałSzewcNo ratings yet
- Remy TechnicalBulletin - July - WebDocument2 pagesRemy TechnicalBulletin - July - WebHenry CanalesNo ratings yet
- Microcontroller-Based Single-Phase Automatic Voltage RegulatorDocument5 pagesMicrocontroller-Based Single-Phase Automatic Voltage RegulatorFuh ValleryNo ratings yet
- High Efficiency Battery ChargerDocument4 pagesHigh Efficiency Battery ChargersanilNo ratings yet
- Process Control Lab ManualDocument32 pagesProcess Control Lab ManualRakesh Kumar Patnaik50% (2)
- Selective Coordination StudyDocument9 pagesSelective Coordination StudyJLPirela1000100% (1)
- Ultra Fast Acting Electronic Circuit BreakerDocument55 pagesUltra Fast Acting Electronic Circuit Breakerpandi60% (5)
- MAX1538EVKITDocument9 pagesMAX1538EVKITohoboho79No ratings yet
- Stability Analysis of Sepic Converter Using Matlab-SimulinkDocument6 pagesStability Analysis of Sepic Converter Using Matlab-SimulinkHilmy AwadNo ratings yet
- Emergency Power Supply of Control Rod For RDEDocument9 pagesEmergency Power Supply of Control Rod For RDEKarthick NatarajanNo ratings yet
- Battery Charger Circuit Using SCRDocument5 pagesBattery Charger Circuit Using SCRlokesh100% (2)
- An137 - Lithium Ion Battery Charger Using c8051f300Document36 pagesAn137 - Lithium Ion Battery Charger Using c8051f300oakkar7No ratings yet
- Trickle-Charge IC For Two-Cell, Lithium-Ion BatteriesDocument8 pagesTrickle-Charge IC For Two-Cell, Lithium-Ion BatteriesDary CalaçaNo ratings yet
- Induction Motor ProtectionDocument42 pagesInduction Motor Protectionjayonline_4u91% (11)
- Capacitor 2Document4 pagesCapacitor 2karthikdote100% (1)
- AN626 - Lead Acid Battery Charger Using The PIC14C000Document0 pagesAN626 - Lead Acid Battery Charger Using The PIC14C000mlaura2No ratings yet
- Irjet V6i3601Document6 pagesIrjet V6i3601Ravi PrakashNo ratings yet
- PB Battery ChargerDocument6 pagesPB Battery ChargerarezrthNo ratings yet
- Application Note 64 August 1996 Using The LTC1325 Battery Management ICDocument44 pagesApplication Note 64 August 1996 Using The LTC1325 Battery Management ICHahdNo ratings yet
- SVAR Power FactorDocument5 pagesSVAR Power FactorRyan HarrisNo ratings yet
- User Manual IpsDocument40 pagesUser Manual Ipsr k mishraNo ratings yet
- Paper 03 Han PengDocument12 pagesPaper 03 Han PengNuno Castro PereiraNo ratings yet
- KA3842AC/KA3842AE SMPS Controller: Features DescriptionDocument7 pagesKA3842AC/KA3842AE SMPS Controller: Features DescriptionJuan GomezNo ratings yet
- Medi ManualDocument39 pagesMedi ManualBabuPD75% (8)
- JST OM226025 - UPS Functioning DescriptionDocument13 pagesJST OM226025 - UPS Functioning Descriptionhiddenhidden16No ratings yet
- Technical Report MykonosDocument18 pagesTechnical Report MykonosMuhammed MekkiNo ratings yet
- Battry 234Document7 pagesBattry 234Sasi Kiran SNo ratings yet
- Design of Lion-Battery Storage Management System With Energy FeedbackDocument4 pagesDesign of Lion-Battery Storage Management System With Energy FeedbackPınar ULUDAĞNo ratings yet
- Final PresentationDocument32 pagesFinal Presentationpavan mariserlaNo ratings yet
- IPS New Manual 2021Document79 pagesIPS New Manual 2021Ranjeet SinghNo ratings yet
- MPPT - Maximum Power Point TrackingDocument9 pagesMPPT - Maximum Power Point TrackingSanjeev ReddyNo ratings yet
- LCD LCT3201AD Service ManualDocument88 pagesLCD LCT3201AD Service ManualrhigniteNo ratings yet
- Dokumen - Tips Iit Delhi Summer Internship Report 2016Document31 pagesDokumen - Tips Iit Delhi Summer Internship Report 2016Shammas MohamedNo ratings yet
- Em Microelectronic: Appnote 407Document15 pagesEm Microelectronic: Appnote 407Zoran ConstantinescuNo ratings yet
- Design 200amp Using 50 Amp Telecom Rectifier Family DC-DC ConvertersDocument5 pagesDesign 200amp Using 50 Amp Telecom Rectifier Family DC-DC ConvertersmanjtobssNo ratings yet
- Mcu-Based Battery Management System For Fast Charging of Iot-Based Large-Scale Battery-CellsDocument5 pagesMcu-Based Battery Management System For Fast Charging of Iot-Based Large-Scale Battery-CellsPeriyasamyNo ratings yet
- 5V USB, 1000ma, I C-Controlled Linear Charger With Power Path Management For Single-Cell, Li-Ion Battery in QFN PackageDocument35 pages5V USB, 1000ma, I C-Controlled Linear Charger With Power Path Management For Single-Cell, Li-Ion Battery in QFN Package123No ratings yet
- Battery State of ChargeDocument9 pagesBattery State of ChargeMark CsenkiNo ratings yet
- Trabajo 2Document18 pagesTrabajo 2ing_pemNo ratings yet
- Infineon-Using The Current Sensing IR212x Gate Driver ICs-An-V01 00-EnDocument7 pagesInfineon-Using The Current Sensing IR212x Gate Driver ICs-An-V01 00-Enquang nguyenNo ratings yet
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- Section 3: Electrical SystemsDocument30 pagesSection 3: Electrical SystemsrobbertmdNo ratings yet
- Over Voltage, Over Current, Transient Voltage & Reverse Polarity Protection Circuit Using RT1720 Hot Swap Controller With Fault TimerDocument10 pagesOver Voltage, Over Current, Transient Voltage & Reverse Polarity Protection Circuit Using RT1720 Hot Swap Controller With Fault TimerKoushik MaityNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Why Clearsky Telematics?: Telematic Options: SpecsDocument1 pageWhy Clearsky Telematics?: Telematic Options: SpecsankitNo ratings yet
- D - ClearSky 3 Wire - Kit InstrDocument10 pagesD - ClearSky 3 Wire - Kit InstrankitNo ratings yet
- Dynapac Connects The Future: Dyn@LinkDocument4 pagesDynapac Connects The Future: Dyn@LinkankitNo ratings yet
- Pfytd 2020 2021Document1 pagePfytd 2020 2021ankitNo ratings yet
- Wheel Loaders L 524 - L 542: New GenerationDocument26 pagesWheel Loaders L 524 - L 542: New GenerationankitNo ratings yet
- Operator S Manual 'Document45 pagesOperator S Manual 'ankit100% (1)
- Chemistry: Crash Course For JEE Main 2020Document18 pagesChemistry: Crash Course For JEE Main 2020Sanjeeb KumarNo ratings yet
- g6 - AFA - Q1 - Module 6 - Week 6 FOR TEACHERDocument23 pagesg6 - AFA - Q1 - Module 6 - Week 6 FOR TEACHERPrincess Nicole LugtuNo ratings yet
- Blue Prism Data Sheet - Provisioning A Blue Prism Database ServerDocument5 pagesBlue Prism Data Sheet - Provisioning A Blue Prism Database Serverreddy_vemula_praveenNo ratings yet
- Oracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Document50 pagesOracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Mario Vilchis Esquivel100% (1)
- OZO Player SDK User Guide 1.2.1Document16 pagesOZO Player SDK User Guide 1.2.1aryan9411No ratings yet
- Movie Piracy in Ethiopian CinemaDocument22 pagesMovie Piracy in Ethiopian CinemaBehailu Shiferaw MihireteNo ratings yet
- Lesson 6 ComprogDocument25 pagesLesson 6 ComprogmarkvillaplazaNo ratings yet
- Fss Presentation Slide GoDocument13 pagesFss Presentation Slide GoReinoso GreiskaNo ratings yet
- Hima OPC Server ManualDocument36 pagesHima OPC Server ManualAshkan Khajouie100% (3)
- 15.053/8 February 7, 2013: More Linear and Non-Linear Programming ModelsDocument42 pages15.053/8 February 7, 2013: More Linear and Non-Linear Programming ModelsShashank SinglaNo ratings yet
- PhraseologyDocument14 pagesPhraseologyiasminakhtar100% (1)
- The Magic DrumDocument185 pagesThe Magic Drumtanishgiri2012No ratings yet
- Huawei R4815N1 DatasheetDocument2 pagesHuawei R4815N1 DatasheetBysNo ratings yet
- Obesity - The Health Time Bomb: ©LTPHN 2008Document36 pagesObesity - The Health Time Bomb: ©LTPHN 2008EVA PUTRANTO100% (2)
- Floating Oil Skimmer Design Using Rotary Disc MethDocument9 pagesFloating Oil Skimmer Design Using Rotary Disc MethAhmad YaniNo ratings yet
- 2009 2011 DS Manual - Club Car (001-061)Document61 pages2009 2011 DS Manual - Club Car (001-061)misaNo ratings yet
- Computing of Test Statistic On Population MeanDocument36 pagesComputing of Test Statistic On Population MeanKristoffer RañolaNo ratings yet
- Project ManagementDocument11 pagesProject ManagementBonaventure NzeyimanaNo ratings yet
- Lec 33 - Householder MethodDocument11 pagesLec 33 - Householder MethodMudit SinhaNo ratings yet
- WebLMT HelpDocument12 pagesWebLMT HelpJoão LopesNo ratings yet
- Outdoor Air Pollution: Sources, Health Effects and SolutionsDocument20 pagesOutdoor Air Pollution: Sources, Health Effects and SolutionsCamelia RadulescuNo ratings yet
- Soosan Crane Training: (Principles)Document119 pagesSoosan Crane Training: (Principles)Boumediene CHIKHAOUINo ratings yet
- Objective & Scope of ProjectDocument8 pagesObjective & Scope of ProjectPraveen SehgalNo ratings yet
- CAT 320D2: Hydraulic ExcavatorDocument5 pagesCAT 320D2: Hydraulic Excavatorhydeer 13No ratings yet
- Evaluation TemplateDocument3 pagesEvaluation Templateapi-308795752No ratings yet